

4241, 4242(ТАУ-без MATLAB) / КР / ТАУ. МетодУказКВыпКурсРаб.МалПоля
.pdfпривод) методом аналитического конструирования регуляторов. Построить переходные характеристики этих приводов по задающему воздействию.
3.3. МОДЕЛИ ОБЪЕКТА В ВИДЕ ОБЫКНОВЕННЫХ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
Для получения математических моделей, описывающих поведение элементов и систем автоматического регулирования, используют три основных способа:
∙аналитический;
∙экспериментальный;
∙комбинированный.
Вкурсовой работе применяется аналитический метод получения математической модели двигателя постоянного тока. Аналитический способ применяется для построения моделей объектов и систем хорошо изученной природы. В этом случае имеется вся необходимая информация о работе соответствующего объекта или системы.
Врезультате идеализации физических объектов или систем, как правило, появляются модели в виде систем дифференциальных уравнений с сосредоточенными параметрами. Типичными представителями технических систем, допускающих такое представление, являются различные электромеханические системы.
Подобные модели систем в наглядной форме отражают физическую природу явлений, протекающих в системе, а также внутреннее устройство системы. Однако методы теории управления обычно абстрагируются от конкретной природы системы и физической природы процессов, протекающих в ней.
Для получения математической модели некоторого динамического объекта или системы обычно придерживаются определенной ниже последовательности действий.
1.Разбивают всю систему на типовые звенья, имеющие одну входную и одну выходную величины. В случае электродвигателя постоянного тока можно выделить следующие два звена:
a)якорная цепь;
b)механическая часть, с которой связана нагрузка.
2.Определяют входные и возмущающие воздействия, а также выходные величины (см. Табл. 3.3).
-21-
Табл. 3.3. Входные и возмущающие воздействия, а также выходные величины ДПТ.
№ |
Входное |
Возмущающее |
Выходные |
|
воздействие |
воздействие |
величины |
||
|
||||
1 |
Напряжение |
Момент |
Частота вращения |
|
питания |
сопротивления |
якоря |
||
|
||||
2 |
Напряжение |
Момент |
Угол поворота якоря |
|
питания |
сопротивления |
|||
|
|
3. Принимают некоторые допущения. В случае с ДПТ обычно принимают следующие основные допущения:
a) пренебрегают реакцией якоря электродвигателя;
b) магнитный поток возбуждения считают постоянным:
ФВ *+,-.
4. Записывают уравнения, описывающие исследуемую систему, используя аналоги законов Ома и Кирхгофа в формулировках соответствующего энергетического домена.
В курсовой работе на основании этих законов можно записать два уравнения. Первым из этих уравнений будет уравнение равновесия
якорной цепи: |
|
я /0/1я 2 я 2 3 4, |
|
|
|
||
(3.1) |
3 · |
|
|
|
|
||
где |
– |
противо-ЭДС вращения. |
|
|
|
||
|
|
|
|
|
|||
|
После подстановки в уравнение (3.1) значения противо-ЭДС вра- |
||||||
щения получится следующее уравнение: |
|
|
|
||||
|
|
|
|
я /0/1я 2 я · я 4 6 · . |
|
|
|
|
Вторым из этих уравнений будет уравнение моментов на валу |
||||||
электродвигателя (уравнение движения). Оно имеет вид: |
|
||||||
|
д · я |
/7/1 д 6 с, |
|
|
|
||
где |
с 6 |
|
|
– момент движущих сил, приложенных к ротору; |
|||
|
|
|
|||||
|
|
момент сил сопротивления. |
|
|
|
||
|
После исключения промежуточной переменной |
|
в уравнении |
||||
|
|
|
|
|
уравнение: |
||
движения электродвигателя получится следующее |
|
д |
|
||||
(3.2) |
|
|
|
/7/1 · я 6 с. |
|
|
|
-22-
5.В случае необходимости модель системы подвергается линеаризации. В данном конкретном случае линеаризация уравнений не требуется.
6.Модель системы записывают в приращениях.
|
|
|
|
я я: 2 ∆ я |
|
|
В случае ДПТ применяются следующие выражения: |
||||
(3.3) |
|
|
9 с с: 2 ∆ с; |
|
|
|
|
|
: 2 ∆ . |
|
|
|
|
|
|
: |
|
|
|
|
уравнения (3.3) в уравнения (3.1) и (3.2) по- |
||
|
После подстановки |
|
4 4 2 ∆4 |
|
|
лучатся следующие уравнения: |
· < : 2 ∆ =; |
||||
(3.4) |
я /∆0/1я 2 я · |
< я: 2 ∆ я= 4: 2 ∆4 6 |
|||
(3.5) |
/∆7/1 |
|
· < я: 2 ∆ я= 6 с: 6 ∆ с. |
||
В установившемся режиме уравнения (3.4) и (3.5) примут сле-
дующий вид: я · я: 4: 6 :
0 · я: 6 с:. ;
С учетом этого получатся следующие уравнения в приращениях:
я /∆0я 2 я · ∆ я ∆4 6 · ∆ /1 /∆7 · ∆ я 6 ∆ с ;
/1 .
7.Переход к относительным безразмерным переменным. Для этого следует умножить и разделить каждое слагаемое дифференциального уравнения на номинальное значение соответ-
ствующей переменной. |
|
|
|
Пусть введены следующие обозначения: |
∆BBн 4. |
||
∆00яня ?; |
∆77н A; |
∆ снс н; |
|
Тогда переход к относительным безразмерным переменным при- |
|||
ведет к следующим выражениям: |
|
|
|
я /1/C · ян |
2 я · ? · я 4 · 4н 6 · A · н; |
||
/D/1 |
· н · ? · я 6 н · сн. |
||
После приведения последних уравнений к стандартному виду получатся выражения:
-23-

|
|
|
Eя·0ян |
/C |
|
|
|
|
|
|
Bн |
|
GH·7н |
· A |
; |
|
|
|
Fя·0ян · /1 |
2 ? 4 · Fя·0ян |
6 Fя·0ян |
|
|||||||||
|
|
|
GI·7J·0нян · |
/D/1 |
|
? 6 GJ·0снян н. |
|
|
|||||||
|
Эти выражения удобно представить в виде: |
|
|
||||||||||||
|
|
|
|
Kэл |
· /1/C |
2 ? 4 6 7 · A; |
|
|
|||||||
|
Kэл –– |
|
Kэм |
· |
/D/1 |
? 6 н н, |
|
|
|||||||
где |
постоянная времени цепи якоря (электрическая постоянная); |
||||||||||||||
|
электромеханическая постоянная; |
|
|
||||||||||||
|
|
– |
коэффициент пропорциональности; |
|
|
||||||||||
|
Kэм |
|
|
||||||||||||
|
н |
– |
коэффициент влияния нагрузки. |
|
|
|
|
||||||||
|
7 |
|
|
|
|
||||||||||
|
Электрическая и электромеханическая постоянные времени име- |
||||||||||||||
ют следующие значения: |
|
|
Q,R |
|
7,714 · 10VRс |
||||||||||
|
|
|
Kэл Fя |
|
|
||||||||||
|
|
|
|
Eя |
|
:, N· :OP |
|
|
|
|
; |
||||
|
|
|
Kэм GJ·0ян |
|
|
|
,N·Q,Q |
0,2034с. |
|||||||
|
|
|
|
I·7н |
|
|
:,: R·Q W, |
|
|
|
|
||||
|
Коэффициент пропорциональности и коэффициент влияния на- |
||||||||||||||
грузки имеют следующие значения |
|
|
|
|
|
||||||||||
|
|
|
|
GH·7н |
|
:,: ·Q W, |
|
; |
|
||||||
|
|
|
7 |
Fя·0ян |
|
Q,R·Q,Q |
|
0,571 |
|
||||||
|
|
|
н |
GJ·0снян |
:,[,N·Q,Q 0,0233. |
|
|||||||||
Таким образом, математическая модель двигателя постоянного тока, у которого входным воздействием является напряжение питания ДПТ, возмущающим воздействием является момент нагрузки ДПТ, а выходной переменной служит частота вращения вала ДПТ будет
иметь следующий вид: |
/1/C |
2 |
? 4 6 0,571 · A. |
||||
(3.6) |
\ |
7,714 · 10VR · |
|||||
|
0,2034 · /D/1 |
? |
6 0,0233 · н |
; |
|||
Математическая модель ДПТ, у которого выходной переменной является угол поворота якоря ДПТ, получается, если учесть, что час-
тота есть первая производная от угла поворота по времени:
/]/1 .
Очевидно, что справедливы следующие равенства:
-24-

A /]/1 и /D/1 //1_]_ .
Таким образом, с учетом последних равенств, математическая модель двигателя постоянного тока, у которого входным воздействием является напряжение питания ДПТ, возмущающим воздействием является момент нагрузки ДПТ, а выходной переменной служит угол по-
ворота якоря ДПТ будет иметь следующий вид: |
|
|||
|
c7,714 · 10VR · /1/C |
2 ? 4 6 0,571 · /]/1 |
; |
|
|
b |
0,2034 · //1]_ |
? – 0,0233 · н |
|
(3.7) |
_ |
/] |
. |
|
|
` |
A /1 |
|
|
В Табл. 3.4 сведены результаты математического моделирования двигателя постоянного тока.
Табл. 3.4. Результаты математического моделирования ДПТ.
|
|
Возму |
|
|
|
|
|
|
|
|
|
|
|
|
|
Вход- |
му- |
|
|
|
|
|
|
|
|
|
|
|
|
|
ное |
щаю- |
Вы- |
|
|
|
|
|
|
|
|
|
|
|
№ |
воз- |
щее |
ходной |
|
Математическая модель ДПТ |
|
|
|
|
|||||
|
дейст- |
воз- |
сигнал |
|
|
|
|
|
|
|
|
|
|
|
|
вие |
дей- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ствие |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7,714 · 10 |
VR |
e? |
|
|
|
|
|
||
1 |
4 |
н |
A |
9 |
|
|
· e 2 ? 4 6 0,571 · A |
; |
||||||
|
|
|
eA |
|
|
|
||||||||
|
|
0,2034 · |
|
|
|
|
|
|||||||
|
|
|
|
|
e |
? 6 0,0233 · н |
|
|
||||||
|
|
|
|
c7,714 · 10VR |
· e 2 ? 4 6 0,571 · |
e |
|
|||||||
2 |
4 |
н |
|
|
|
|
e |
|
н |
|
; |
|||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
0,2034 · |
|
|
|
|
|
||||||
|
|
|
|
b |
e |
|
? – 0,0233 · |
|
|
|||||
|
|
|
|
|
|
|
e |
|
|
|
|
|||
|
|
|
|
` |
|
|
|
|
A e |
|
|
|
|
|
3.4. МОДЕЛИ ОБЪЕКТА В ФОРМЕ ПРОСТРАНСТВА СОСТОЯНИЙ
Форма пространства состояний – это матричная форма записи
-25-
системы дифференциальных уравнений объекта или системы управления, адаптированная для управления путем выделения из нормальной формы Коши алгебраических уравнений, связывающих внутренние координаты объекта или системы с выходными координатами.
Она особенно широко применяется для описания систем управления большого порядка, как правило, с несколькими входами и выходами и с перекрестными связями.
В любой системе управления можно выделить некоторую совокупность переменных, которые характеризуют ее динамику. Эти переменные зависят от времени и могут изменяться при изменении внешних воздействий на САУ. Они вместе характеризуют состояние системы в некоторый момент времени, поэтому называются переменными состояния системы.
Число этих переменных фиксировано, является необходимым и достаточным для описания систем управления и определяет порядок системы.
Таким образом, состояние системы в любой фиксированный момент времени можно характеризовать положением вектора состояния САУ в ее пространстве состояний.
Пусть введены обозначения:
x(t) = (x1 (t), x2 (t), K, xn (t))T – вектор переменных состояния САУ, n – порядок САУ.
u(t) = (u1 (t), u2 (t), K, um (t))T – вектор входных воздействий САУ. y(t) = ( y1 (t), y2 (t), K, yq (t))T – вектор выходных переменных САУ.
Тогда модель непрерывной САУ в пространстве состояний в самом общем виде может быть представлена системой из двух матричных уравнений:
(3.8) |
x(t) = f (t, x(t0 ), u(t)) |
, |
|
||
|
y(t) = g(t, x(t), u(t)) |
|
где f (K) и g(K) – некоторые вектор-функции.
Первое уравнение в системе (3.8) называется матричным уравнением состояния системы управления. Из него видно, что вектор состояния системы всегда однозначно определяется в любой момент времени через вектор входных переменных системы управления и через начальные значения переменных состояния.
Второе уравнение системы (3.8) называется матричным выходным уравнением системы управления. Из него видно, что вектор выходных переменных системы всегда однозначно определяется в любой момент времени через вектор входных переменных системы управле-
-26-
ния и через вектор переменных состояния системы.
Если система автоматического управления является линейной и стационарной динамической системой, то ее модель в пространстве состояний представляется в виде:
x&(t) =
(3.9)
y(t) =
Ax(t) + Bu(t)
.
Cx(t) + Du(t)
Здесь
|
a11 |
a12 |
K a1n |
|
b11 |
b12 |
K b1m |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A = |
a21 |
a22 |
K a2 n |
|
Rn×n ; B = b21 |
b22 |
K b2m |
R |
|||||
|
M |
M O M |
|
|
|
M |
|
M |
O M |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
an 2 |
K ann |
|
|
|
bn 2 |
|
|
|
|
||
|
an1 |
|
bn1 |
K bnm |
|
||||||||
|
c |
c |
K c |
|
|
d |
|
d |
K d |
|
|
|
|
|
11 |
12 |
1n |
|
|
|
11 |
|
12 |
|
1m |
|
|
|
c21 |
c22 |
K c2 n |
|
|
d21 |
d22 |
K d2 m |
|
||||
C = |
M |
M O M |
|
Rq×n ; D = M |
M |
O M |
|
R |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c |
c |
K c |
|
|
d |
q1 |
d |
q 2 |
K d |
|
|
|
|
q1 |
q 2 |
qn |
|
|
|
|
|
qm |
|
|||
n×m
q×m
;
.
Матрица A называется матрицей состояний системы управления, т. к. она полностью определяет внутреннюю структуру системы и характеризует ее динамические свойства.
Матрица B полностью определяет структуру входного устройства системы и поэтому называется входной матрицей системы.
Матрица C полностью определяет структуру выходного устройства системы управления и поэтому называется выходной матрицей системы.
Матрица D напрямую связывает входные переменные системы управления с ее выходными переменными. Обычно ее никак не называют, но на основании предназначения этой матрицы ее можно назвать вход-выходной матрицей системы.
Развернутая запись матричных уравнений (3.9) имеет вид:
-27-
|
x |
|
a |
||
|
1 |
|
11 |
||
d |
x2 |
|
a21 |
||
|
|
M |
|
= M |
|
dt |
|||||
|
|
|
|
||
|
|
|
|||
|
xn |
|
an1 |
||
(3.10) |
y |
|
c |
||
|
|||||
1 |
|
11 |
|||
|
y2 |
|
c21 |
||
|
|||||
|
|
= |
|||
|
M |
|
M |
||
|
|
|
|
||
|
yq |
|
cq1 |
||
a12
a22
M
an 2
c12
c22
M
cq 2
K a |
|
x |
|
b |
|||
|
1n |
|
1 |
|
|
11 |
|
K a2n |
x2 |
|
b21 |
||||
O |
M |
|
× |
M |
|
+ |
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K |
ann |
xn |
|
bn1 |
|||
K c |
|
x |
|
d |
|||
|
1n |
|
1 |
|
|
11 |
|
K c2n |
x2 |
|
d21 |
||||
O |
M |
|
× |
M |
|
+ |
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K |
cqn |
xn |
|
dq1 |
|||
b12
b22
M
bn 2
d12
d22
M
dq 2
Kb1m
Kb2m
O M
Kbnm
Kd1m
|
u |
|
|
1 |
|
|
u2 |
|
|
× M |
|
|
|
|
|
|
|
|
um |
|
|
|
. |
Kd2m
O M
Kdqm
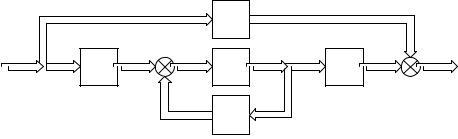
Системам уравнений (3.9) и (3.10) соответствует структурная схема системы управления, изображенная на Рис. 3.1, что непосредственно видно из самих систем уравнений.
u(t) |
& |
x(t) |
y(t) |
x(t) |
Рис. 3.1. Структурная схема модели линейной САУ в форме пространства состояний.
Матричное описание в форме пространств состояний является строго формализованным и совершенно абстрагируется от физической природы системы автоматического управления или ее элементов, т. к. при ее использовании у всех систем управления получается одна и та же структурная схема (см. Рис. 3.1). Следовательно, в этом случае теряются сведения о реальной структуре системы управления.
Для определения общей модели ДПТ в стандартной форме пространства состояний удобно преобразовать систему уравнений (3.7) и записать ее в следующем виде:
-28-
c |
/1/C 612,963 · 10Q · ? 6 7,402 · 10Q · A 2 12,963 · 10Q · 4 |
|
|||
|
|
/D |
н |
. |
|
|
|
|
|
; |
|
b/]/1 A |
/1 4,916 · ? – 0,115 · |
|
|||
Очевидно, что переменными состояния ДПТ являются: |
|
||||
` |
|
|
|
|
|
h |
ток якоря; |
|
|
||
? – |
частота вращения вала; |
|
|||
h |
A – |
угол поворота якоря. |
|
|
|
Очевидно, входными воздействиями для ДПТ будут: |
|
||||
hQ |
– |
|
|
|
|
i 4– |
напряжение питания ДПТ; |
|
|||
|
момент нагрузки ДПТ; |
|
|||
Очевидно, что выходные сигналы ДПТ: |
|
||||
i н– |
|
|
|
||
A – |
частота вращения вала; |
|
|||
угол поворота якоря. |
|
|
|||
В этом случае систему уравнений (3.7) можно записать в сле- |
|||||
|
– |
|
|
|
|
дующем виде: |
|
|
|
||
c//1j 612,963 · 10Q · h 6 7,402 · 10Q · h 2 12,963 · 10Q · i |
|||||
|
|
|
//1_ 4,916 · h – 0,115 · i |
; |
|
b |
|
|
/ P |
|
|
|
|
/1 |
h |
. |
|
|
|
|
|
h |
|
` |
|
|
|
hQ |
|
|
|
|
|
|
|
Таким образом, в пространстве состояний исследуемая система описывается в общем виде системой из трех дифференциальных уравнений первого порядка и двумя линейными алгебраическими уравнениями:
-29-
|
|
/ |
h |
|
612963 |
67402 |
0 |
h |
2 |
|
||||||
|
c/1 kh l k 4,916 |
|
|
|
0 |
0l · kh l |
|
|||||||||
|
|
|
hQ |
|
|
0 |
|
|
0 |
1 |
0 |
hQ |
|
|
||
|
|
|
|
|
|
12963 |
|
|
|
|
|
|
|
|||
(3.11) |
|
|
|
|
|
2 k |
0 |
|
60,115l · mi n |
|
|
. |
||||
|
|
|
|
|
|
|
0 |
|
|
|
0 |
|
|
|
|
; |
|
b |
|
|
|
|
|
|
|
i |
i |
|
|
||||
|
|
|
0 1 0 |
|
h |
|
0 0 |
|
|
|||||||
|
|
m n m0 0 1n · k |
h |
|
|
· mi n |
|
|||||||||
|
` |
|
Ql 2 m0 0n |
|
||||||||||||
|
612963 67402 |
|
h |
|
12963 |
|
0 |
; |
||||||||
|
|
0 ; |
|
|
|
|||||||||||
Отдельно матрицы коэффициентов запишутся так: |
|
|
||||||||||||||
|
o p 4,916 |
|
0 |
|
0q |
|
r p |
0 |
60,115q |
|||||||
|
|
|
0 |
|
s t0 |
1 |
|
0 |
|
|
|
0 |
|
0 |
|
|
|
|
|
|
|
|
1 0u; |
|
v t0 0u. |
|
|
|
|||||
|
|
|
|
записать уравнения в форме пространства состоя- |
||||||||||||
Далее следует |
|
|
0 |
|
0 1 |
|
|
0 0 |
|
|
|
|||||
ний отдельно для случаев, когда выходной переменной является час-
тота вращения вала якоря |
|
A |
и когда выходной переменной |
|
якоря |
|
. |
||
является угол поворота валаy |
|
|
||
В первом случае (он удобен |
при синтезе частотных приводов), ко- |
|||
|
y |
|
||
гда выходным сигналом системы является частота вращения вала яко-
ря |
c/1/ mh n m612963 67402n · mh n 2 |
|||||||||||
A, получается система уравнений: |
|
|
|
|
||||||||
(3.12) |
h |
|
4,916 |
0 |
0 |
|
i h |
. |
||||
|
|
2 m12963 |
|
|
n · m |
i |
n |
; |
||||
|
b |
< |
0 |
|
60,115 |
|
|
· mi n |
||||
|
1 |
= · mh n 2 |
< |
|
0 |
= |
||||||
|
|
0 |
|
|
|
0 |
|
|
|
|||
Во втором`случае (он |
удобен при синтезе позиционных приво- |
|||||||||||
|
|
h |
|
|
|
|
|
i |
|
|||
дов), когда выходным сигналом системы является угол поворота вала якоря , получается система уравнений:
-30-