

ТЕОРЕМА ОБ ИЗМЕНЕНИИ КОЛИЧЕСТВА ДВИЖЕНИЯ СИСТЕМЫ
Количество движения системы
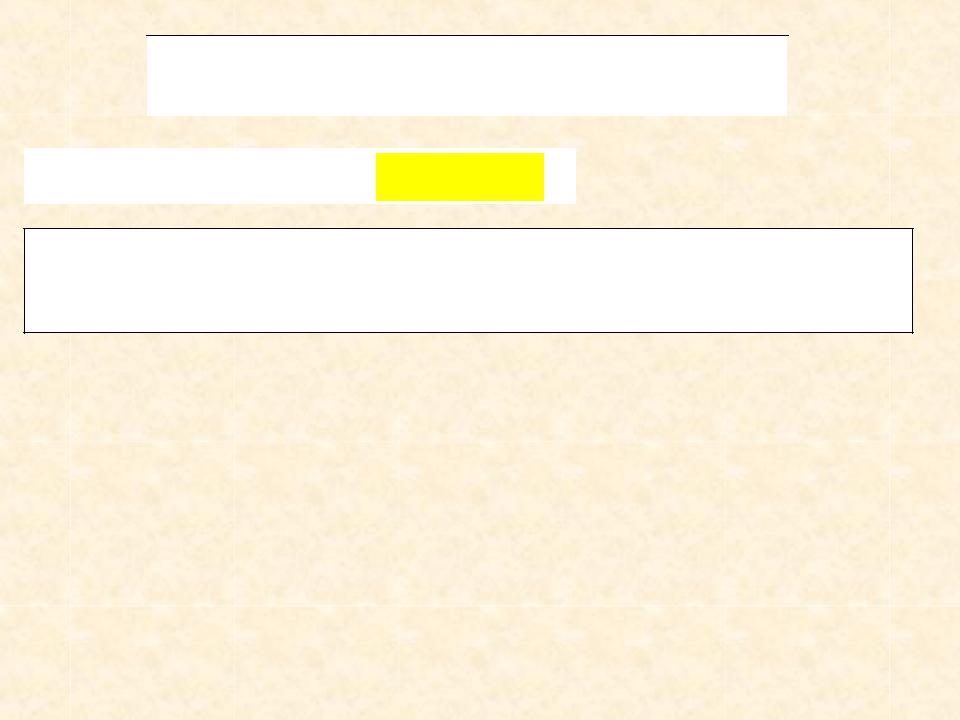
Опр. Количеством движения системы называется векторная величина Q,
равная геометрической сумме (главному вектору) количеств
движений всех точек системы: Q mkV k . (1)
m1 |
|
|
|
|
|
|
|
|
|
|
|
|
V1 |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
m1 V1 |
|||||||
|
|
|
|
|
|
|
||||||
В1 |
|
m2 |
|
|
|
|
|
|
||||
В2 |
V2 |
|||||||||||
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
||
Q
Вn 
 mn Vn
mn Vn
m2 V2
 mnVn
mnVn
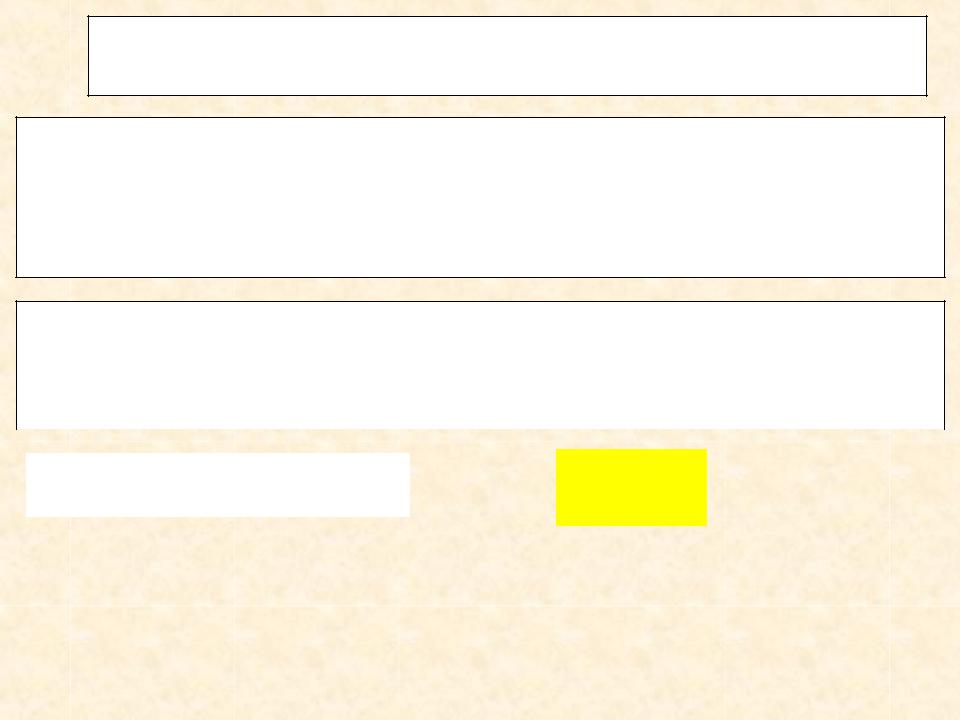
Упростим выражение для Q. |
Из выражения для радиуса – |
||||||
вектора центра масс, найдем |
mk rk M rC . |
||||||
|
|
|
|
|
|||
|
Беря от обеих частей производную по времени, получим |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
mk drk M |
drC |
|
|||
|
|
или mkVk |
MVC . |
|
|||
|
|
dt |
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
mk |
drk |
|
drC |
|
||
M |
или mkVk |
MVC . |
|
|||
|
dt |
|
dt |
|
|
|
Отсюда находим, что Q M VC . |
(2) |
Вывод. Количество движения системы равно произведению массы всей системы на скорость ее центра масс.
Теорема об изменении количества движения системы в дифференциальной форме
Рассмотрим систему из n точек. Составим для нее дифференциальные уравнения движения в векторной форме и сложим их почленно. Получим
mk ak Fke Fki .
Последняя сумма по первому свойству внутренних сил равна
нулю. Кроме того, |
|
|
|
d |
|
|
|
dQ |
|
|||
mk ak |
|
mkVk |
|
|
|
. |
||||||
dt |
dt |
|||||||||||
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dQ |
|
e |
|
(1) |
|
|
Окончательно находим |
|
|
|
|
|||||||
|
|
|
|
|
dt Fk . |
|
||||||
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
||||||
Уравнение (1) выражает теорему об изменении количества движения системы в дифференциальной форме.
Теорема. Производная по времени от количества движения системы равна геометрической сумме всех действующих на систему внешних сил.
В проекциях на координатные оси будет:
dQ |
x |
e |
|
dQу |
e |
|
dQ |
z |
e |
(2) |
|
Fkх |
, |
|
Fkу |
, |
|
Fkz . |
|||
dt |
|
dt |
dt |
|
||||||
|
|
|
|
|
|
|
|
Теорема об изменении количества движения системы в интегральной (конечной) форме.
Пусть в момент времени t = 0 количество движения системы Q0 , а в момент t1 становится равным Q1.
Тогда, умножая обе части равенства (1) на dt и интегрируя, |
|
||||||
получим |
|
|
t1 |
|
|
|
|
Q1 |
Q0 |
Fkedt |
или Q1 |
Q0 |
Ske. |
(3) |
|
|
|
|
0 |
|
|
|
|
Уравнение (3) выражает теорему об изменении количества движения системы в интегральной (конечной) форме.
Теорема. Изменение количества движения системы за некоторый промежуток времени равна сумме импульсов, действующих на систему внешних сил за тот же промежуток времени.
В проекциях на координатные оси будет:
Q1х Q0х Skхe , Q1у Q0у Skуе , Q1z Q0z Skze . (4)
Практическое значение теоремы в том, что она позволяет исключить из рассмотрения все внутренние силы.
Закон сохранения количества движения
Рассмотрим следующие следствия из теоремы.
1. Пусть сумма действующих внешних сил равна нулю: Fke 0.
Тогда, из уравнения (1) следует, что Q const.
Вывод 1. Если сумма всех внешних сил равна нулю, то вектор количества движения системы будет постоянен по модулю и направлению.
2. Пусть сумма проекций внешних сил на какую-нибудь ось равна нулю: Fkхe 0.
Тогда, из уравнений (2) следует, что Qх const.
Вывод 2. Если сумма проекций всех действующих внешних сил на какую - нибудь ось равна нулю, то проекция количества движения системы на эту ось есть величина постоянная.
Общий вывод. Следствия 1 и 2 выражают закон сохранения количества движения системы.