

ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ
Применяя последовательно принцип Даламбера и принцип возможных перемещений получим общий метод решения задач динамики.
Рассмотрим систему материальных точек, на которую наложены идеальные связи.
Если ко всем точкам системы кроме действующих активных
сил Fka и реакций связей |
Nka |
прибавить соответствующие |
|||
силы инерции |
F и m |
a |
, |
|
|
k |
k |
k |
|
|
|
то согласно принципу Даламбера полученная система сил будет находиться в равновесии.
Применяя к этим силам принцип Лагранжа, получим
δАka δАkи δАkr 0.
Так как на систему наложены идеальные связи, то |
δАkr 0. |
||
|
|
|
|
|
Тогда δАka δАkи 0. |
(3) |
|
Равенство (3) выражает принцип Даламбера – Лагранжа.
Принцип Даламбера – Лагранжа. При движении механической системы с идеальными связями в каждый момент времени сумма элементарных работ всех приложенных активных сил и всех сил инерции на любом возможном перемещении системы равна нулю.
Равенство (3) называют также общим уравнением динамики.
В аналитической форме уравнение (3) имеет вид
[(Fkxa Fkxи ) хk (Fkуa Fkуи ) уk (Fkza Fkzи ) zk ] 0. |
(4) |
Уравнения (3) и (4) позволяют составить дифференциальные уравнения движения системы.
Пример применения принцип Даламбера – Лагранжа.
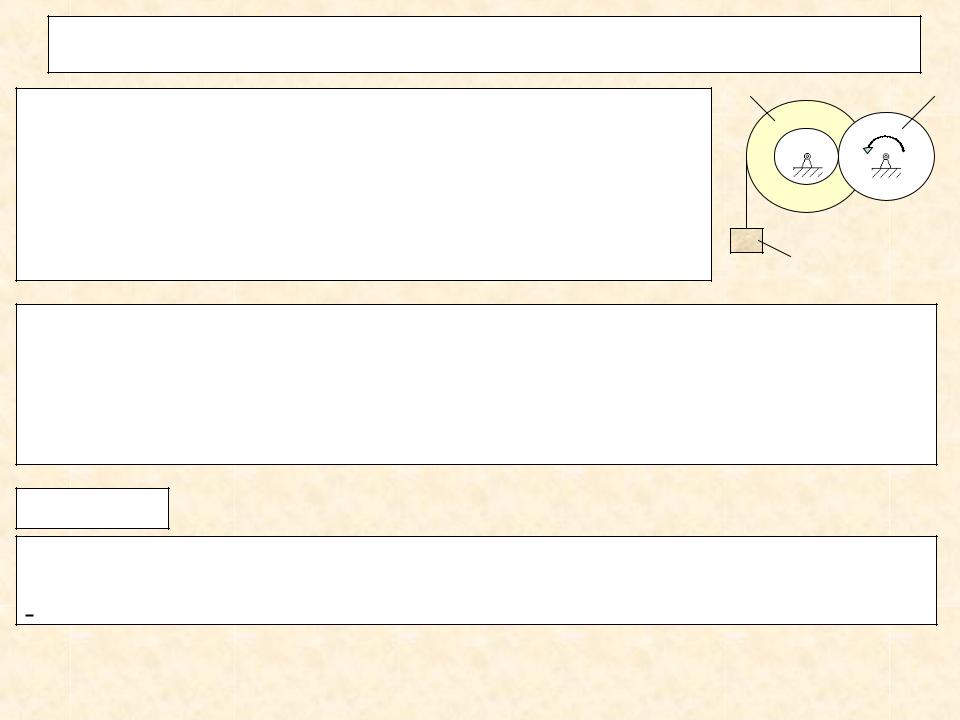
В подъемнике к шестерне 1, имеющей вес |
Р1 и |
2 |
1 |
|
М |
||
радиус инерции ρ1, приложен вращающий |
|
|
|
|
|
|
момент М. Определить ускорение
поднимаемого груза 3 весом Q, пренебрегая
3
весом веревки и трением в осях.
Барабан, на котором на котором намотана веревка, жестко скреплен с другой шестерней; их общий вес равен Р2 , а
радиус инерции относительно оси вращения ρ2.. Радиусы шестерней равны соответственно r1, r2, а радиус барабана r.
Решение.
1.Изображаем действующую на систему активную силу Q
ивращающий момент М (другие силы работу не совершают).
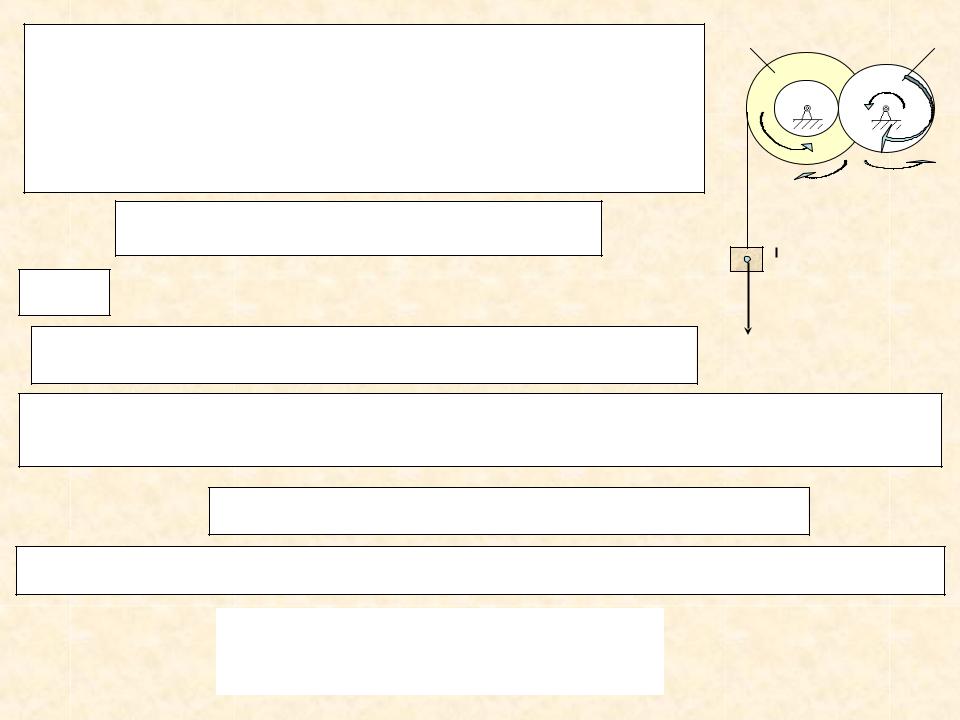
2. Присоединим к ним силу инерции груза F3и
М1и и М 2и , к которым
приводятся силы инерции вращающихся тел. Эти величины по модулю равны:
F3и m3 а3, |M1и| J1z ε1, |M 2и| J2z ε2.
или
F3и (Q/g)а3 , |M1и| (P1 /g)ρ12 ε1, |M 2и| (P2 /g)ρ22 ε2.
2 |
|
1 |
1и |
М |
и |
М |
|
2 |
М |
|
ε2  ε1
ε1
 а3
а3
F3и 
 3
3
Q
Сообщая системе возможное перемещение и составляя уравнение (3), получим
-(Q F3и ) s3 (М M1и )δ 1 M 2и δ 2 0.
3. Выражая все перемещения через δφ2
δs3 rδ 2 , |
δ 1 |
|
ω1 |
|
r2 |
. |
δ 2 |
|
|||||
|
|
ω2 |
|
r1 |
||

Окончательно уравнение движения примет вид
|
Q(1 a3 |
)r P2 |
ρ2 ε |
|
P1 |
ρ2 |
ε |
|
r2 |
M r2 0. |
|
|||
|
|
|
|
|
||||||||||
|
|
g |
g |
2 |
2 |
|
g |
1 |
1 r |
r |
|
|||
|
|
|
|
|
|
|
|
|
|
1 |
1 |
|
|
|
|
|
|
|
|
|
|
||||||||
4. Входящие сюда величины 1 |
и |
2 |
|
выразим через искомое а3. |
||||||||||
|
|
|
|
|
|
|||||||||
|
|
ε2 а3 /r, |
ε1 r2 ε2 /r1 |
r2 a3 /rr1. |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В результате найдем окончательно
a3 |
(rr /r )M |
r2Q |
|
g. |
|||
r2Q ρ2 P (ρ2 r2 |
/r2 )P |
||||||
|
2 |
1 |
|
|
|
|
|
|
2 |
2 |
1 |
2 |
1 |
1 |
|
|
|
|
|
|
|
|
|
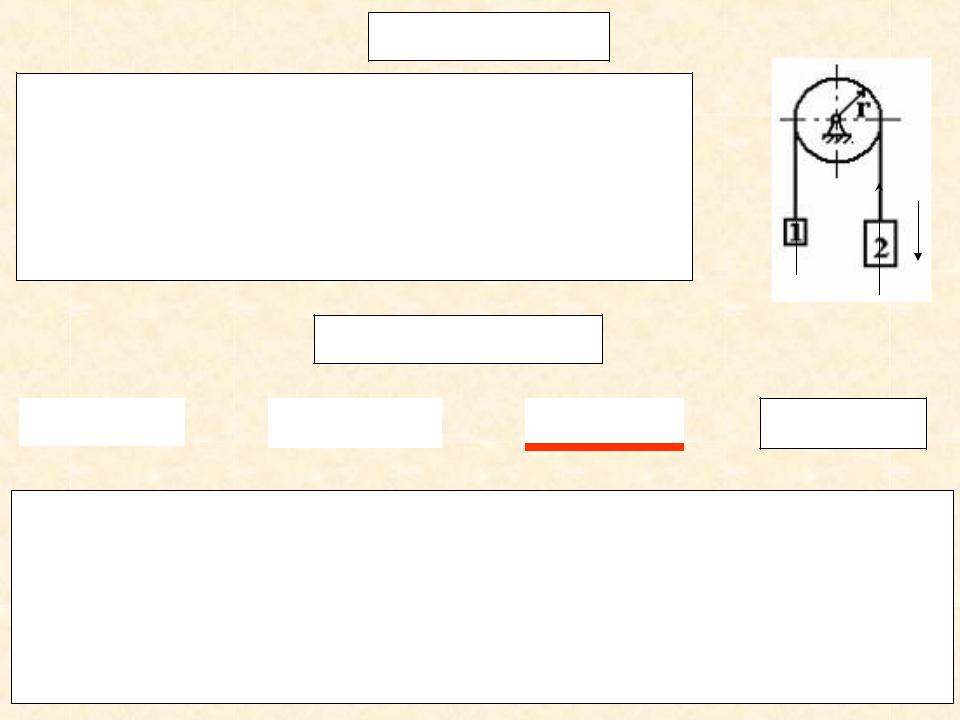
Задание 25
Грузы 1 и 2, массы которых m2 = 3m1,
прикреплены к тросу, переброшенному через блок радиуса r.
Если принять g =10 м/с2 и пренебречь массой блока, то ускорение грузов равно…
Варианты ответа
1) 15 м/с2 |
|
2) 20 м/с2 |
|
3) 5 м/с2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F2И а
F1И  Р1
Р1
 Р2
Р2
δs
4) 10 м/с2
Общее уравнение динамики
Р2δs – F2И δs – F1И δs – Р1δs = 0.
Поделив уравнение на δs, и вычисляя силы инерции
F2И = m2 a, F1И = m1 a, получим g (3 m1 - m1) = a (3 m1 + m1).
Откуда а = g/2 = 5 м/с2.
|
|
|
|
|
|
|
Задание 26 |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
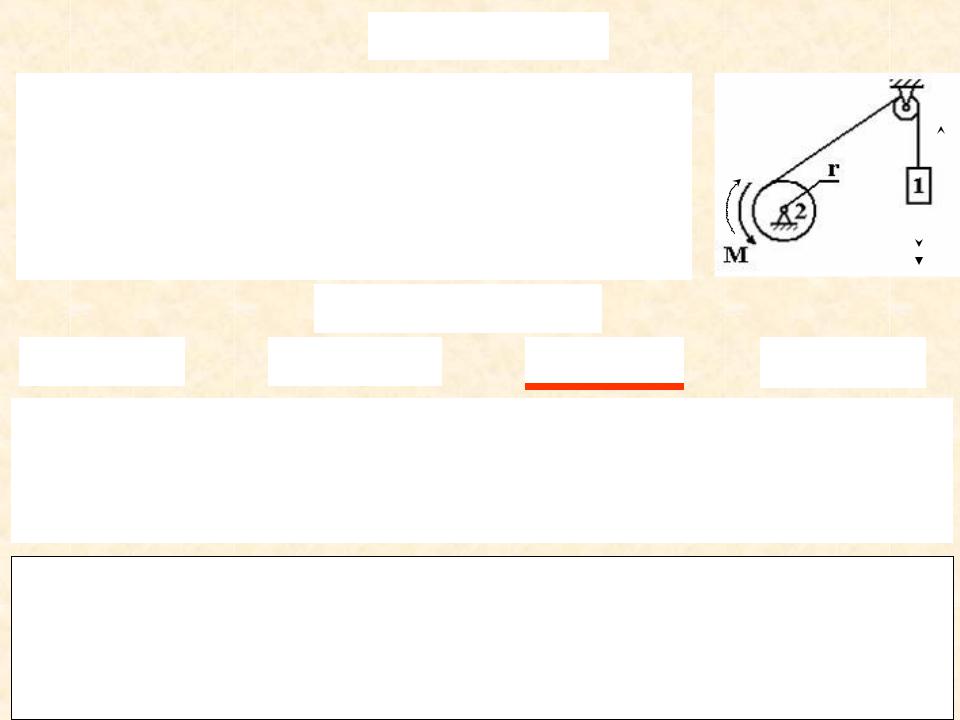
Тело 1 поднимается с ускорением а = 3 м/с2, |
|
|
|
|
|
|
|
||||||||||
|
|
массы тел m1 = m2 = 20 кг, радиус барабана 2, |
|
|
|
|
|
а |
|||||||||||
|
|
|
|
|
|
|
|||||||||||||
|
|
который можно считать однородным |
|
|
F1И |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
2 |
). |
|
|
|
|
МИ |
|
|||||||||
|
|
цилиндром, r = 0,1м (g = 10 м/с |
|
|
|
|
|
|
|
|
|
||||||||
|
|
Тогда модуль момента М пары сил равен… |
|
|
|
|
Р1 |
||||||||||||
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Варианты ответа |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
1) 17 Нм |
|
|
2) 11 Нм |
|
|
3) 29 Нм |
|
|
4) 27 Нм |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
Общее уравнение динамики: Мδφ – МИ δφ – F1И δs – Р1δs = 0. |
|
||||||||||||||||
|
|
|
|
|
Вычислим силы инерции |
|
|
|
|
|
|
|
|||||||
|
|
|
F1И = m1a, МИ = J ε = (m2 r2 /2) ·a/ r = m2 a r /2. |
|
|||||||||||||||
Выразим угловое перемещение через линейное δφ = δs / r.
М δs / r – m2 a r (δs / r) /2 – m1 a δs – m1 g δs = 0.
Поделив уравнение на δs, найдем: М/ r– m1g – а(m1+ m2/2) = 0. Откуда: М = (m1g + а(m1+ m2/2)) r = 29 Нм.