

ДИНАМИКА
(Общие теоремы динамики точки)

ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ ТОЧКИ
Общие теоремы – следствие законов динамики. Они избавляют от необходимости интегрирования дифференциальных уравнений.
1. Теорема об изменении количества движения точки
Опр. Количеством движения материальной точки называется векторная величина , равная
произведению массы точки на ее скоростьmV .
Физический смысл
Количество движения является мерой механического движения материальной точки.
Размерность: в СИ —1 Н·с, МКГСС— 1 кГ· с
Импульс
силы
Физический смысл Импульс силы характеризует действие,
оказываемое на тело силой за  некоторый промежуток времени.
некоторый промежуток времени.
|
Элементарный импульс |
|
|
|
|
|
|||
|
dS |
F dt. |
|
|
|
|
|
|
|
Импульс силы за конечный промежуток
времени t1
S Fdt.
0
 Импульс постоянной силы
Импульс постоянной силы
( F const ) |
S F t1 . |
Импульс силы в проекцииt на ось
1
Sх Fх dt.
0

Теорема об изменении количества движения точки в дифференциальной форме
Запишем второй закон динамики |
|
||
ma Fk в виде |
d(mV ) |
Fk . |
( ) |
|
dt |
|
|
Равенство (*) выражает теорему об изменении количества движения точки в
дифференциальной форме.
Теорема Производная от количества движения точки по
времени равна геометрической сумме всех действующих на точку сил.
Теорема об изменении количества движения точки в конечной форме
Пусть при t1 скорость точки - V1 , а при t2 V2
Тогда интегрируя уравнение (*) в приделах от t1 до t2 , |
||
получим: |
mV2 mV1 Sk . |
(**) |
Равенство (**) выражает теорему об изменении количества движения точки в конечной форме.
Теорема. Изменение количества движения точки за некоторый промежуток времени равно сумме импульсов действующих на точку сил за тот же промежуток времени.
Проектируя равенство (**) на произвольную ось Ох, получим mV2 х mV1х Skх . (***)
Равенство (***) выражает теорему об изменении количества движения точки в проекции на ось.

Задача. Грузу, имеющему массу m и лежащему на горизонтальной плоскости, сообщают (толчком) начальную скорость
Последующее движение груза тормозится постоянной силой F.
|
|
N V |
О |
F |
х |
V0 . |
|
|
|
|
Р |
Определить, через сколько времени груз остановится.
Решение
Изобразим груз в произвольном положении и приложим все действующие силы: силу тяжести – Р,
реакцию плоскости N , тормозящую силу - F.
Выберем начало координат в точке, откуда начинается движение и направим ось Ох в сторону движения.

|
|
|
|
|
|
|
N V |
||||||
Запишем теорему об изменении |
|
|
|
F |
|
|
|||||||
|
|
|
|
|
|||||||||
количества движения в проекции на |
О |
|
|
|
|
|
|
|
|
х |
|||
|
|
|
|
|
|||||||||
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
||||||
ось: |
mV1х mV0 х Skх . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Р |
||||||
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|||||
Здесь V1х = 0 (V1 – скорость в момент остановки), а V0х = V0 - начальная скорость.
На ось Ох проектируется только постоянная сила F .
· Ее импульс определиться в виде
Sх = Fх t1 = - F t1, где t1 – время торможения.
Тогда теорема примет вид: - m V0 = - F t1, откуда t1= m V0 / F .
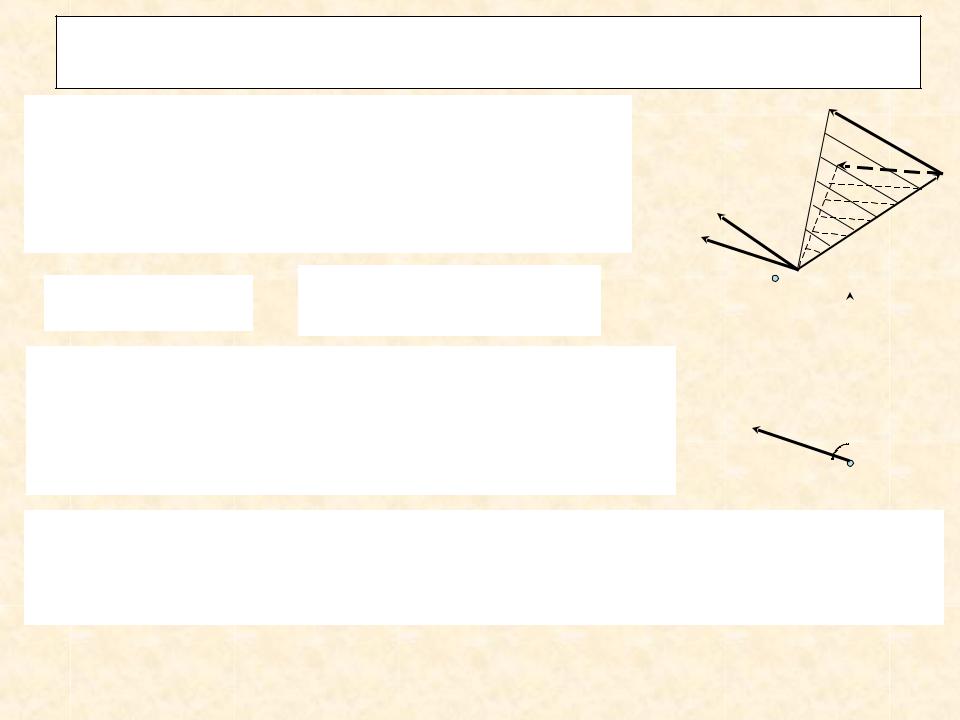
2. Теорема об изменении момента количества движения точки (теорема моментов)
|
|
Момент количества движения точки |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
mV |
||||||||
|
|
относительно центра О |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
||||||
|
|
находится аналогично векторному |
|
|
|
mO ( F ) |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
моменту силы относительно центра. |
|
|
|
mo ( mV ) |
|
|
|
|
|
|
|
|
r |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|||||||||||||
|
|
mO (F) r x F |
|
|
|
|
(1) |
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
m (mV ) |
r x |
mV |
|
|
|
|
О |
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
o |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
Моментом количества движения точки |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
относительно некоторого центра О |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
называется векторная величина, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
mz ( mV ) |
|||||||||
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
определяемая равенством (1). |
|
|
mo ( mV ) |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
О |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
Момент количества движения точки относительно оси Оz |
|
||||||||||||||||||||||||||||||||
|
равен проекции вектора |
mo (mV ) на эту ось. |
(2) |
|
||||||||||||||||||||||||||||||
|
|
|
mz |
( mV ) [ mO ( mV )]z |
| mO ( mV )| cos( ). |
|
||||||||||||||||||||||||||||
Теорема моментов относительно центра
Вычислим производную от выражения (1):
|
|
d |
|
|
d |
|
|
|
|
|
|
|
dV |
|
|
|
|
||
|
|
|
dr |
|
|||||||||||||||
|
|
|
mo (mV ) |
|
|
(r x mV ) ( |
|
x mV ) |
(r x |
m |
|
) (V x mV ) (r x ma). |
|||||||
|
|
dt |
|
dt |
dt |
dt |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
||
|
Так как (V x mV ) 0 и |
ma F, то |
|
[mo (mV )] mO |
(F ). (3) |
||||||||||||||
|
|
dt |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Равенство (3) выражает теорему моментов относительно некоторого центра О.
Теорема. Производная по времени от момента количества движения точки, взятого относительно некоторого неподвижного центра, равна моменту действующей на точку силы относительно того же центра.
Теорема моментов относительно оси
Проектируя равенство (3) на некоторую ось Оz, получим: d (4) dt [ mz ( mV )] mz ( F ).
Равенство (4) выражает теорему моментов относительно оси.
Следствия из теоремы моментов
1) Если |
m ( F ) 0, |
то из выражения (3) следует, что |
O |
|
|
|
mo ( mV ) const. |
|
|
|
|
2) Если |
mz (F) 0, |
то из выражения (4) следует, что |
|
mz (mV ) const. |
|