

1.2. О Simulink
Simulink– это сопутствующаяMATLABпрограмма, предназначенная для моделирования динамических систем. Она состоит из блоков, которые перетаскиваются на экран и с ними делаются различные манипуляции. Следует иметь ввиду, что во время перетаскивания иконок в процессоре происходит компиляция соответствующей программы. В этой работе будет представлено моделирование нелинейной системы с помощью данной программы, точнее, будет представлена структурная схема рассматриваемой системы.
1.3. Описание блоков, используемых в работе
В данном разделе приведено описание тех блоков, которые используются при выполнении данной лабораторной работы.

![]()
Интегрирующий блок



Графический блок

-C
Оператор домножения



2. Решение системы дифференциальных уравнений 2 порядка
2.1. Недиссипативная система.
2.1.1. Введение
Рассмотрим решение системы дифференциальных уравнений 2 порядка. Для примера возьмём систему следующего вида
 (2.1)
(2.1)
которая является модификацией системы
![]() (2.2)
(2.2)
Система (2.2) представляет собой уравнение колебательной системы, в котором отсутствует диссипативный член, за который должна отвечать первая производная по координате.
Решение последней системы имеет вид
![]() (2.3)
(2.3)
Таким образом решение данной системы уравнений представляется в виде графиков тригонометрических функций.
Поскольку мы имеем дело с системой дифференциальных уравнений 2 порядка, то нам необходимо будет дважды выполнить операцию интегрирования. Для начала запишем систему (1) в матричном виде
 (2.4)
(2.4)
Таким образом, матрица P системы имеет вид
![]() (2.5)
(2.5)
Управляющее воздействие в системе отсутствует, поэтому матрица управления нулевая.
Для интегрирования системы (1) необходимо задать начальные условия. Поскольку система (1) имеет 2 различных решения, а её общее решение представляется их линейной комбинацией (3), то, соответственно, каждое из решений можно представить так
 (2.6)
(2.6)
и,
подставляя в (6)
![]() получаем начальные условия
получаем начальные условия
 (2.7)
(2.7)
2.1.2. Описание выполняемых операций
Для начала создайте модель и сохраните её под именем, например, «dif_2»

Рис. 2.1. Окно построения модели
Так как нам необходимо дважды провести интегрирование, то для этого нам нужно вывести на экран два интегрирующих блока

Рис. 2.2. Интегрирующие блоки
Для отображения графика решения системы ставим соответствующий блок

Рис. 2.3. Введен графический блок
Поскольку нам нужно отобразить графики двух переменных системы, то графический блок будет иметь два входа (можно отбразить графики решения системы в различных графических блоках)

Рис. 2.4. Для графического блока предусмотрено 2 входа
Выход каждого интегрирующего блока соединяем с соответствующим входом графического блока

Рис. 2.5. Выходы интегрирующих блоков соединены со входами графического блока
На выходе каждого интегрирующего блока будет находиться каждая из переменных системы, а на входе, соотвественно, их производные с соответствующими знаками. Поскольку производная от первой переменной системы равна второй переменной, то от выходной стрелки, передающей графическому блоку значения второй переменной, необходимо сделать разветвление в сторону первого интегрирующего блока, которое замкнётся на вход этого блока

Рис. 2.6. Построен вход первого интегрирующего блока
Производная от второй переменной системы равна значению первой переменной, взятому с противоположным знаком, поэтому нам необходимо сначала изменить знак этой производной с положительного на отрицательный. Для этого нам потребуется оператор домножения на «-1»

Рис. 2.7. Выведен оператор домножения
На вход оператора домножения необходимо подать значение первой переменной, поэтому мы делаем разветвление от первого выхода графического блока в сторону входа оператора домножения

Рис. 2.8. Построен вход оператора домножения
Выходом оператора домноженя будет являться значение производной второй переменной системы, которое мы подаём на вход второго интегрирующего блока
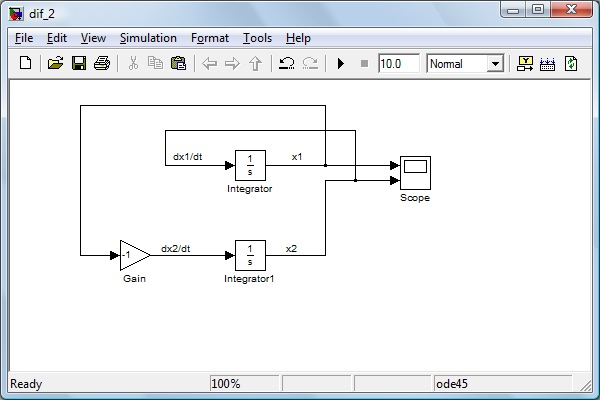
Рис. 2.9. Построен вход второго интегрирующего блока
Итак, мы построили схему решения системы (2.1), но, прежде чем проинтегрировать построенную схему, необходимо задать начальные условия. Чтобы задать начальные условия, необходимо изменить параметры интегрирующих блоков. По умолчанию на вход каждого интегрирующего блока подаётся нулевой сигнал. Поскольку в начальный момент времени вторая переменная системы принимает нулевое значение (см. (2.7)), то мы не будем изменять начальное значение поданного на 2-й интегрирующий блок сигнала. Нам остаётся изменить лишь начальное значение сигнала, поданного на 1-й интегрирующий блок, поскольку оно у нас равно единице. Для этого дважды щёлкаем правой кнопкой мыши по необходимому элементу – в результате у нас откроется окно

Рис. 2.10. Окно задания параметров интегрирующего блока
Задаём начальное условие для первого блока так, как показано ниже

Рис. 2.11. Заданы начальные условия для первой переменной
После запуска симуляции системы графический блок отобразит следующее

Рис. 2.12. График решения системы
Как видно из рисунка, решением системы являются косинусоида и синусоида соответственно каждой её переменной.