

5.6. Основные уравнения асинхронного двигателя
Основные уравнения асинхронного двигателя аналогичны уравнениям трансформатора, полученным выше (см. раздел 4).
Напряжение U1, приложенное к фазе обмотки статора, уравновешивается ЭДС самоиндукции Е1, ЭДС рассеяния Еδ1 = I1Х1 и падением напряжения на активном сопротивлении обмотки статора
ΔU1 = I1R1
![]() (5.2)
(5.2)
Для роторной обмотки вращающегося ротора уравнение равновесия напряжения будет иметь вид
![]() (5.3)
(5.3)
Так как роторная обмотка замкнута, то напряжение U2 = 0 и, учитывая, что Е2S =sЕ2 и Х2S = sХ2, уравнение (5.3) можно переписать в виде
![]() (5.4)
(5.4)
Уравнение токов асинхронного двигателя повторяет аналогичное уравнение трансформатора:
![]() (5.5)
(5.5)
где I1 – ток статора;
I0 – ток холостого хода статора при неподвижном роторе и разомкнутой обмотке ротора;
![]() - приведенный ток
ротора (см. раздел 5.7).
- приведенный ток
ротора (см. раздел 5.7).
5.7. Приведение параметров обмотки ротора к обмотке статора
Для построения векторной диаграммы осуществим приведение параметров обмотки ротора к параметрам обмотки статора. При этом обмотку ротора с числом фаз m2 , обмоточным коэффициентом k2 и числом витков W2 заменяют обмоткой с соответствующими параметрами статора m1, k1, W1, соблюдая при этом энергетический баланс в роторе.
Методика приведения параметров асинхронного двигателя аналогична методике приведения вторичной обмотки трансформатора. При этом уравнение обмотки ротора (5.4) примет вид
![]() (5.6)
(5.6)
где
![]()
![]()
![]()
![]() ;
;
![]() - коэффициент
трансформации асинхронного двигателя.
- коэффициент
трансформации асинхронного двигателя.
5.8. Векторная диаграмма асинхронного двигателя
Построим векторную диаграмму асинхронного двигателя, используя принципы построения векторной диаграммы трансформатора (см. раздел 4.9.) и основные уравнения двигателя (5.2), (5.5), (5.6).
Полученная
диаграмма, представленная на рис. 5.7,
аналогична векторной диаграмме
трансформатора в рабочем режиме (рис.
4.9), с учетом того, что для двигателя U2
= 0 и угол ψ2
между направлениями векторов ЭДС Е1
= ![]() и вектором приведенного вторичного
тока
и вектором приведенного вторичного
тока ![]() определяется как
определяется как
ψ2
= arctg
![]()
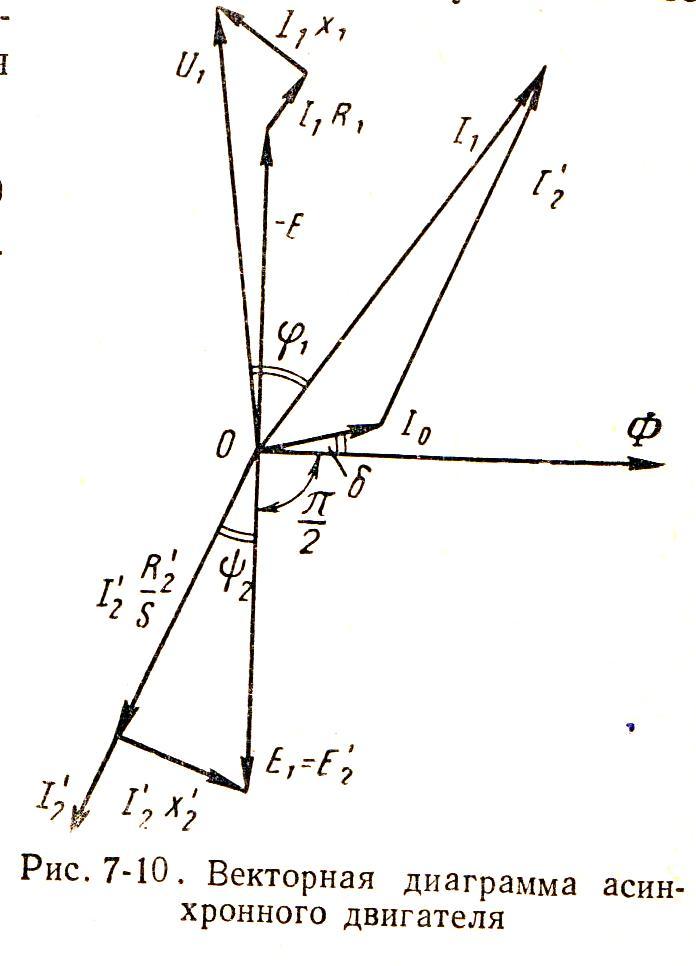
Рис. 5.7. Векторная диаграмма асинхронного двигателя
5.9. Схема замещения асинхронного двигателя
Эквивалентная
схема замещения асинхронного двигателя,
представленная на рис. 5.8, аналогична
схеме замещения нагруженного трансформатора
и соответствует основным уравнениям
(5.2), (5.5), (5.6) после преобразования
последнего к виду
![]()
R1
X1




![]()
![]()

R0
I1







![]()


~U1
E1

![]()
![]()
![]()


X0
I0



Рис. 5.8. Эквивалентная схема замещения асинхронного двигателя.
На представленной
схеме R1,
X1
- активное
и индуктивное сопротивления обмотки
статора;
![]() ,
,![]() - приведенные активное и индуктивное
сопротивления обмотки ротора;R0,
X0
- активное и индуктивное сопротивления
сердечников статора и ротора; s
– скольжение.
- приведенные активное и индуктивное
сопротивления обмотки ротора;R0,
X0
- активное и индуктивное сопротивления
сердечников статора и ротора; s
– скольжение.
Величину
![]() можно рассматривать как сопротивление
нагрузки, включенное в обмотку ротора.
Оно является единственным переменным
параметром схемы. Изменение этого
сопротивления эквивалентно изменению
скольженияs,
а следовательно, изменению нагрузки на
валу двигателя. Величина
можно рассматривать как сопротивление
нагрузки, включенное в обмотку ротора.
Оно является единственным переменным
параметром схемы. Изменение этого
сопротивления эквивалентно изменению
скольженияs,
а следовательно, изменению нагрузки на
валу двигателя. Величина
![]() (5.7.)
(5.7.)
является величиной напряжения, приложенного к нагрузке двигателя.