

4.9. Экспериментальное определение параметров трансформаторов
Параметры трансформаторов обычно определяются при проведении опытов холостого хода и короткого замыкания.
В опыте холостого хода определяются:
К – коэффициент трансформации;
Р0 = ∆РС НОМ –номинальные потери в сердечнике (потери в стали);
R0, Xo, Z0 - активное, индуктивное и полное сопротивления сердечника;
α – угол магнитных потерь.
В опыте короткого замыкания определяются:
РК = ∆РМ НОМ – номинальные потери в обмотках трансформатора (потери в меди);
R1, X1 – активное и индуктивное сопротивление первичной обмотки;
![]() - реальные и
приведенные активное и индуктивное
сопротивления вторичной обмотки;
- реальные и
приведенные активное и индуктивное
сопротивления вторичной обмотки;
4.9.1. Опыт холостого хода.
Схема проведения опыта холостого хода приведена на рис. 4.10.
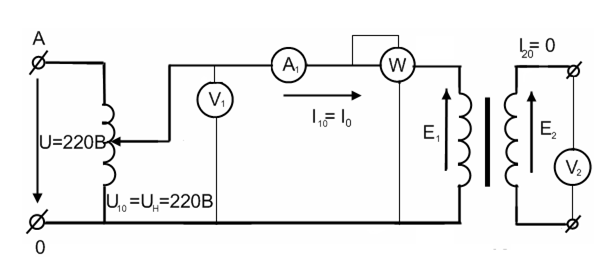
Рис. 4.10. Схема проведения опыта холостого хода
Первичная
обмотка включена на номинальное
напряжение, значение которого определяется
по паспорту трансформатора, U10=U1ном
и по ней протекает ток холостого хода
I0
≈ (5![]() 10)
%I1ном.
Трансформатор при этом потребляет
от сети некоторую активную мощность
Р0,
измеряемую ваттметром.
10)
%I1ном.
Трансформатор при этом потребляет
от сети некоторую активную мощность
Р0,
измеряемую ваттметром.
Во вторичную
обмотку трансформатора включен вольтметр,
сопротивление которого очень велико,
и ток в этой обмотке практически равен
нулю I20![]() 0,
а напряжение U20,
измеряемое вольтметром V2,
равно ЭДС вторичной обмотки, т.е. U20=
E2.
0,
а напряжение U20,
измеряемое вольтметром V2,
равно ЭДС вторичной обмотки, т.е. U20=
E2.
Коэффициент трансформации трансформатора определяется в соответствии с выражением (4.6)
К =
![]()
Мощность Ро, потребляемая трансформатором и измеряемая ваттметром, расходуется на нагрев обмотки (потери в меди) ∆РМ и на нагрев сердечника (потери в стали) ∆РС
Р0 = ∆РМ + ∆РС
Потерями в меди
∆РМ
в этом опыте можно пренебречь, т.к. во
вторичной обмотке они отсутствуют ∆РМ2
=
![]() = 0, а в
первичной – они малы по сравнению с
номинальными, вследствие малости тока
холостого хода I10
= 0, а в
первичной – они малы по сравнению с
номинальными, вследствие малости тока
холостого хода I10
∆РМ1
=
![]()
![]() 0,1 % ∆ РМ
НОМ
0,1 % ∆ РМ
НОМ
Следовательно, мощность, потребляемая трансформатором в опыте холостого хода, равна потерям в сердечнике трансформатора:
Р0 = ∆РС
Потери в сердечнике ∆РС пропорциональны квадрату магнитной индукции В2, т.е. квадрату магнитного потока Ф2. В трансформаторе магнитный поток Ф связан с ЭДС прямо пропорционально Е1 = 4,44 f W1 Фm, а при холостом ходе U10=E1, с точностью 0,5%.
Следовательно, потери в сердечнике трансформатора пропорциональны квадрату приложенного напряжения:
∆РС~B2~Ф2~Е12![]() U12
U12
Так как в опыте холостого хода к первичной обмотке прикладывается номинальное напряжение, то потери в сердечнике в этом опыте равны номинальным, т.е. Р0 = ∆ РС НОМ.
Эти потери возникают при циклическом перемагничивании сердечника вследствие явления гистерезиса и вихревых токов.
Полное сопротивление сердечника Z0 определяется как:
Z0
=
![]()
Величину активного сопротивления сердечника R0, учитывающего тепловые потери электрической энергии в сердечнике, находят по выражению
R0
=
![]()
Индуктивное
сопротивление сердечника: Х0
=
![]()
При нахождении угола магнитных потерь в сердечнике α принимается, что вектора напряжения U1 и противо- ЭДС (-Е1) совпадают по направлению. В этом случае α можно определить, как
α =
![]() - φ10 =
- φ10 =
![]() ,
,
где S0 = U10 I0 – полная мощность трансформатора в режиме холостого хода.
φ10 – угол сдвига по фазе между током I0 и напряжением U1 первичной обмотки.