

4.7. Векторная диаграмма рабочего режима трансформатора.
Векторная диаграмма рабочего режима трансформатора (рис.4.9) строится в следующей последовательности.
1) За базисный (основной) вектор принимается вектор рабочего магнитного потока Ф.
2)Направление е ЭДС Е1 и Е2 откладывают от направления вектора Ф под углом – 90о
3) Вектор приведенного
вторичного тока
![]() откладывают
от направления е в сторону отставания
под углом
откладывают
от направления е в сторону отставания
под углом![]()
![]()
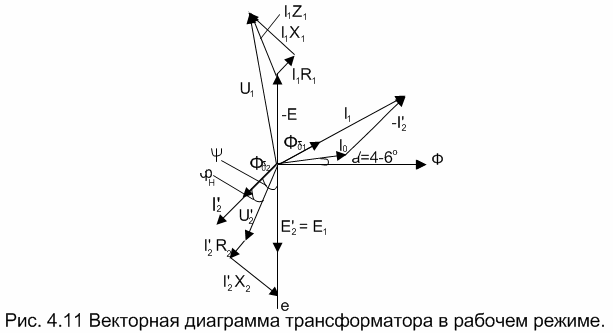
Рис. 4.9. Векторная диаграмма трансформатора в рабочем режиме
4) Вектор приведенного
вторичного напряжения
![]() откладывают от вектора
откладывают от вектора![]() под углом φН
в сторону опережения (рассматриваем
случай активно-индуктивной R-L
нагрузки, при которой напряжение
опережает ток)
под углом φН
в сторону опережения (рассматриваем
случай активно-индуктивной R-L
нагрузки, при которой напряжение
опережает ток)
φн=arctg![]()
5) Величину вектора
приведенной вторичной ЭДС
![]() =E1
определяют по уравнению равновесия
напряжений вторичной обмотки:
=E1
определяют по уравнению равновесия
напряжений вторичной обмотки:
![]()
Для этого из
конца вектора
![]() строят вектор
строят вектор![]() параллельно вектору
параллельно вектору![]() ,
а затем из конца этого вектора откладывают
вектор
,
а затем из конца этого вектора откладывают
вектор![]() в сторону
опережения на 90о
до пересечения с направлением е.
в сторону
опережения на 90о
до пересечения с направлением е.
6) Строят вектор тока холостого хода I0, опережающий вектор магнитного потока Ф на угол магнитных потерь α (обычно 4-6о).
7) Вектор тока первичной обмотки I1 находят по первому закону Кирхгофа
![]()
8) Напряжение U1, приложенное к первичной обмотке, находят по уравнению равновесия напряжений для этой обмотки
![]()
При этом вектор
![]() I1R1
проводится из конца вектора –Е1,
противоположного вектору Е1,
параллельно
вектору I1,
а вектор I1Х1
под углом 900
к вектору I1R1
в сторону опережения.
I1R1
проводится из конца вектора –Е1,
противоположного вектору Е1,
параллельно
вектору I1,
а вектор I1Х1
под углом 900
к вектору I1R1
в сторону опережения.
9) Строят вектора
магнитных потоков рассеяния Фδ1
и Фδ2,
совпадающие по фазе с соответствующими
токами I1
и
![]() 2.
2.
4.8. Коэффициент полезного действия трансформатора.
При передаче электрической энергии трансформатором происходят потери активной электрической мощности ∆Р, состоящие из потерь в сердечнике (в стали) ∆РС, и потерь в проводах обмоток (в меди) ∆РМ.
Обычно, у мощных
трансформаторов общая величина потерь
довольно мала (∆Р
![]() 1
1![]() 3%
РНОМ)
и его КПД
3%
РНОМ)
и его КПД
![]() =
=![]() = 98 - 99%,
= 98 - 99%,
где Р1 – мощность, потребляемая из сети, Р2 – полезная мощность трансформатора.
Вследствие незначительности потерь определение КПД трансформатора как отношения мощностей Р2 к Р1 затруднено, т.к. при измерении этих мощностей погрешность измерений оказывается сравнимой с величиной потерь в трансформаторе.
Поэтому, КПД
трансформатора определяют косвенным
путем по данным потерь мощности,
измеряемых в опытых холостого хода Р0
и короткого замыкания РК
с учетом коэффициента загрузки
трансформатора
![]() ,
,
![]() гдеI2
– величина тока вторичной обмотки при
фактической нагрузке трансформатора
в рабочем режиме;
гдеI2
– величина тока вторичной обмотки при
фактической нагрузке трансформатора
в рабочем режиме;
I2 ном – номинальный ток вторичной обмотки;
![]()
где Р2НОМ – номинальная активная мощность трансформатора;
Р0 = ∆РС НОМ –номинальные потери в сердечнике (потери в стали), определяемые в опыте холостого хода. Это постоянные потери, не зависящие от коэффициента загрузки трансформатора.
РК = ∆РМ НОМ – номинальные потери в обмотках трансформатора (потери в меди), определяемые в опыте короткого замыкания.
Поскольку потери
в меди ∆РМ
пропорциональны квадрату тока
![]() и следовательно – квадрату коэффициента
загрузки, их величину в любом режиме
можно определить через номинальные
потери и коэффициент загрузки:
∆Рм
=
и следовательно – квадрату коэффициента
загрузки, их величину в любом режиме
можно определить через номинальные
потери и коэффициент загрузки:
∆Рм
=![]() 2∆Рмном
=
2∆Рмном
=![]() 2РК
2РК
Паспортную номинальную мощность трансформатора задают через полную мощность S2ном, т.к. выбор трансформатора производится по требуемой полной мощности, т.е. с учетом коэффициента мощности нагрузки cosφн, который для различных потребителей может сильно различаться даже при одинаковой активной мощности.
Поэтому обычно
КПД трансформатора выражают через
полную мощность
![]()
где S2ном – полная номинальная мощность трансформатора;
cos![]() -
коэффициент мощности нагрузки
(потребителя);
-
коэффициент мощности нагрузки
(потребителя);
S2ном
cos![]() =
Р2ном
– номинальная активная мощность
трансформатора.
=
Р2ном
– номинальная активная мощность
трансформатора.
Для того, чтобы
трансформатор при длительной работе в
номинальном режиме не перегревался,
выбор мощности трансформатора производят
по условию S2ном
![]() Sн
=
Sн
=
![]()
![]()
где Sн и Рн – полная и активная мощности, потребителя.