

Пособие_Бедарев_Федорова_Федорченко
.pdfв которой после несложных преобразований останется два независимых уравнения:
z1 − z2 = 0− 2z2 + z3 = 0 .
Полагая z2 = 1, получим собственный вектор z = (1, 1, 2). Ищем собственные векторы, соответствующие кратному собственному значению λ1 = λ2 = −2 . После преобразований остается одно независимое уравнение x1 − x2 + x3 = 0 , которое задает целую плоскость собственных векторов. Полагая x2 = 1, x3 = 0 , y2 = 0, y3 = 1 , получим два линейно независимых собственных вектора x = (1,1, 0) и y = (−1, 0,1) . Проверяем, что полученная система собствен-
ных |
векторов |
линейно |
независима. |
Пусть |
||||||||||
α1 |
|
+ α2 |
|
+ α3 |
|
= |
|
. Тогда |
|
|
|
|
||
|
|
|
0 |
|
|
|
|
|||||||
x |
y |
z |
|
|
|
|
||||||||
|
|
|
|
|
|
|
α |
− α |
2 |
+ α |
3 |
= 0 |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|||
|
|
|
|
|
|
|
α1 |
|
|
+ α3 |
= 0 . |
|
||
|
|
|
|
|
|
|
|
α2 + 2α3 |
= 0 |
|
||||
|
|
|
|
|
|
|
|
|
||||||
Определитель однородной системы равен 4, следовательно, она имеет единственное решение α1 = α2 = α3 = 0 , откуда следует линейная независимость векторов x, y, z .
3.5.Приведение матрицы к диагональному виду
Впредыдущих примерах было показано, что система собственных векторов матрицы линейного оператора, отображающе-
го R n → R n , соответствующих разным собственным значениям, линейно независима. Если матрица имеет полную систему соб-
ственных векторов, то они образуют базис в пространстве R n , в котором исходная матрица имеет наиболее простой вид. Матрицы, которые имеют базис, составленный из собственных векторов, называются матрицами простой структуры. Они могут быть приведены к диагональному виду, причем на диагонали будут
30
стоять собственные значения матрицы. Это означает, что линейное преобразование, соответствующее данной матрице, является преобразованием растяжения по характерному направлению, задаваемому собственным вектором.
Для приведения матрицы к диагональному виду используют линейное преобразование, матрица которого составлена из столбцов, являющихся собственными векторами. Не всякая матрица имеет простую структуру, следовательно, не каждая может быть приведена к диагональному виду.
Пример 1.4. Приведем к диагональному виду матрицу из Примера 1.1. Запишем найденные собственные векторы в
|
|
|
|
|
|
2 |
1 |
и найдем обратную |
||||
матрицу преобразования C = |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
3 |
-1 |
|
|
|
|
|
C −1 = 1 |
1 |
|
|
|
|
|
|
|
|
|
||
|
|
. |
|
|
|
|
|
|
|
|
|
|
5 |
|
- 2 |
|
|
|
|
|
|
|
|
|
|
3 |
|
|
2 + 3 |
2 - 2 |
1 |
0 |
|
|
|
|||
Проверка: C ×C −1 = |
1 |
= I . |
|
|
||||||||
|
|
= |
|
|
|
|||||||
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
3 - 3 |
3 + 2 |
0 |
1 |
|
|
|
||
Применяя (1.1), получим |
|
|
|
|
|
|
|
|||||
A¢ = C −1 × A ×C = |
|
2 |
2 5 |
2 2 |
1 |
8 |
0 |
, |
||||
1 |
|
× |
. |
|
|
= |
|
|||||
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
3 |
- 4 3 |
6 3 |
-1 |
0 |
3 |
|
|||
т.е. в результате перехода к новому базису получена диагональная матрица, на главной диагонали которой стоят собственные значения. В дальнейшем полезно иметь не только ортогональный, но и ортонормированный базис. Вычислим евклидову норму векторов:
|
|
|
|
|
|
= |
|
22 + 32 |
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
= 12 + (−1)2 |
= |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
13, |
|
2 , |
|
|
|||||||||||||||||||||||||||||||
|
|
x |
|
|
|
y |
|
|
|
|
|||||||||||||||||||||||||||||||
следовательно, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
1 = |
|
|
|
= 2 |
|
|
|
|
|
|
|
|
|
T , |
|
2 |
= |
|
|
|
|
= |
|
|
|
|
, − 1 |
|
T . |
||||||||||
|
|
|
|
x |
|
|
, 3 |
|
|
|
|
|
|
|
y |
1 |
|
||||||||||||||||||||||||
e |
|
|
|
|
|
|
e |
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
x |
|
|
13 |
|
|
|
13 |
|
|
|
y |
|
|
|
|
2 |
|
2 |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
31 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Пример 1.5.
Для матрицы из Примера 1.3 найдены собственные векторы
|
= (1,1, 0) , |
|
|
= (−1, 0,1) , |
|
|
= (1, 1, 2), из которых образуем |
|||||||
x |
|
y |
|
z |
||||||||||
|
1 |
-1 1 |
|
|
|
|
|
-1 |
3 |
-1 |
||||
|
|
|
|
|
|
−1 |
= |
1 |
|
|
- 2 |
|
|
|
C = 1 |
0 |
|
|
1 , C |
2 |
|
1 |
0 . |
||||||
|
|
1 |
|
|
|
|
|
|
|
|
1 -1 |
|
||
|
|
|
|
|
|
|
|
|||||||
|
0 |
|
|
2 |
|
|
|
|
|
|
1 |
|||
(Проверить, что C ×C −1 = C −1 ×C = I .)
Приводим к диагональному виду: A¢ = C −1 × A ×C =
|
|
-1 |
3 |
-1 |
|
1 |
− 3 |
3 |
|
1 |
-1 1 |
|
|||||
|
|
- 2 |
|
|
|
× |
|
|
− 5 |
|
|
|
|
|
|
|
= |
2 |
1 |
0 |
|
|
3 |
|
|
|
1 |
0 |
1 |
|
|||||
= 1 |
|
|
|
3 . |
|
|
|||||||||||
|
1 -1 1 |
|
|
6 |
− 6 |
4 |
|
0 |
1 |
2 |
|
||||||
|
|
|
|
|
|
|
|
|
|||||||||
1 |
− 3 |
1 |
1 |
-1 1 |
- 2 |
0 |
0 |
|||||||
|
|
− 2 |
|
|
|
|
|
|
|
|
|
- 2 |
|
|
= 2 |
0 . 1 |
0 |
1 |
= 0 |
0 . |
|||||||||
|
2 |
− 2 |
2 |
|
|
0 |
1 |
2 |
|
|
0 |
0 |
4 |
|
|
|
|
|
|
|
|||||||||
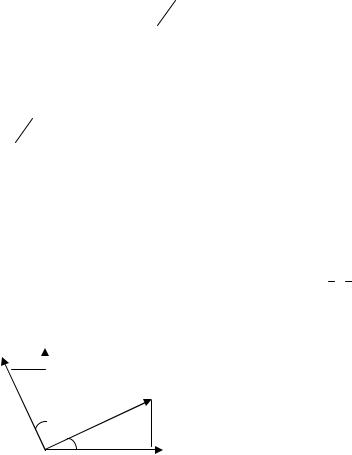
Пример 1.6. Покажем пример линейного преобразования, матрица которого не может быть приведена к диагональному виду. Рассмотрим оператор поворота системы координат (e1, e2 ) на
плоскости на заданный угол α (см. рисунок). |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
Базисные |
векторы |
новой |
|||||
|
|
|
e |
2 |
системы |
координат имеют |
||||||||||
|
|
|
|
|
|
|
|
|
вид: |
= (cosα,sinα ); |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
||||
|
|
|
|
|
g |
1 |
|
|
g |
|||||||
|
|
|
|
|
|
|
|
|
|
|
2 |
= (-sinα , cosα). |
||||
|
|
α |
g |
|||||||||||||
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||
g2 |
Следовательно, |
матрицей |
||||||||||||||
|
|
|
|
α |
||||||||||||
|
|
|
|
преобразования будет |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
cosα |
- sinα |
||
|
|
|
|
|
|
e1 |
A = |
|
|
. |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cosα |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sinα |
|
||
Преобразование поворота системы координат
32
Характеристическое уравнение для нахождения собственных значений имеет вид
(cosα - λ )2 + sin2 α = 0,
cos2 α - 2λ cosα + λ2 + sin2 α = λ2 - 2λ cosα +1 = 0
|
|
|
λ |
= cosα ± cos2 α -1 |
|
1,2 |
|
|
Уравнение имеет вещественный корень λ = 1 в случае
D = cos2 α − 1 = 0 cosα = 1 α = πk, k = 1, 2, ...,
что соответствует тривиальному решению поворота на угол, кратный π. Во всех остальных случаях матрица преобразований не имеет вещественных собственных значений.
3.6. Сопряженный оператор. Квадратичная форма
Пусть A – линейный оператор в гильбертовом пространстве H. Если существует такой оператор B, что x, y H справед-
ливо ( Ax, y) = (x, By) , то оператор B называется сопряженным к A и обозначается A*. Сопряженным к оператору поворота системы координат на угол α (см. Пример 1.6) является оператор обратного поворота, т.е. поворот на угол – α.
Матрицей сопряженного оператора будет транспонированная матрица: A* = AT. Можно доказать следующие свойства сопряженных операторов:
∙(A + B)* = A* + B* ;
∙(α × A)* = α × A* , α – вещественная константа;
∙(A × B)* = B* × A* ;
∙A, A* имеют одинаковые характеристические уравнения
и, следовательно, одинаковые собственные значения. Оператор называется самосопряженным, если x, y H
( Ax, y) = (x, Ay) , т.е. A = A* . Легко понять, что матрица само-
сопряженного оператора симметрична, т.е. A = AT. Важным свойством самосопряженных операторов является то, что они имеют простую структуру, т.е. обладают полным набором веще-
33

ственных собственных значений и соответствующих им собственных векторов.
С каждой симметричной матрицей связана так называемая квадратичная форма (x, Ax) , представляющая собой уравнение кривой второго порядка. Действительно, пусть n = 2:
|
|
|
|
a11 |
a12 |
|
x1 |
|
2 |
2 |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
= a11 x1 |
+ 2a12 x1x2 + a22 x2 . |
(x, Ax) = ( x1, x2 ) × |
|
|
× |
|
||||||
|
|
|
|
a12 |
a22 |
x2 |
|
|
|
|
Верно и обратное, т.е. каждой квадратичной форме соответствует своя симметричная матрица. Поскольку симметричная матрица имеет простую структуру, то она может быть приведена к диагональному виду. Для квадратичной формы это означает отсутствие смешанных произведений вида xi × x j , i ¹ j , или приве-
дение к главным осям.
Квадратичная форма и соответствующая ей матрица положительно определена, если (x, Ax) ³ 0 "x ÎН. Можно пока-
зать, что все собственные значения симметричной положительно определенной матрицы положительны.
Пример 1.7.
Привести к каноническому виду квадратичную форму
x12 + 5x22 + x32 + 2 x1x2 + 6 x1x3 + 2 x2 x3 .
Составим матрицу, определяющую квадратичную форму:
1 |
1 |
3 |
|
|
|
|
|
|
|
A = 1 |
5 |
1 |
. |
|
|
3 |
1 |
1 |
|
|
|
|||
Поскольку матрица симметричная, она имеет полный набор вещественных собственных значений и собственных векторов, следовательно, ее можно привести к диагональному виду. Находим собственные значения
det(A - λI ) = 0 Û λ3 - 7λ2 + 36 = 0 , λ1 = -2, λ2 = 3, λ3 = 6
и соответствующие им собственные векторы
34

|
|
|
1 |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
= 0 , |
|
|
|
|
= |
2, |
|
= |
− 1 , |
|
|
|
|
= |
3, |
|
= 2 , |
|
|
|
|
= 6 . |
|||||||||
|
x |
|
|
x |
|
y |
|
|
y |
|
z |
y |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
||
|
|
|
−1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Следовательно, канонический вид формы имеет вид
−2 y12 + 3y22 + 6 y32 ,
аматрица преобразования координат y = Cx составлена из
нормированных собственных векторов:
|
1 |
|
|
1 |
|
|
1 |
|
|
|||
|
|
|
|
|
|
|
||||||
2 |
3 |
6 |
||||||||||
|
|
|
− 1 |
|
|
|
||||||
C = |
0 |
|
|
|
|
|
2 |
|
. |
|||
|
|
|
|
|||||||||
|
− 1 |
|
|
|
|
3 |
|
6 |
|
|||
|
|
|
1 |
|
1 |
|
|
|||||
|
|
|
||||||||||
|
|
2 |
|
3 |
|
|
6 |
|
||||
|
|
|
|
|
|
|||||||
Тема 4. Системы линейных алгебраических уравнений
С алгеброй матриц связаны следующие задачи:
∙решение СЛАУ;
∙вычисление определителей матриц;
∙нахождение обратных матриц;
∙отыскание спектра и собственных векторов.
Все методы решения СЛАУ можно разбить на два класса: прямые (точные) и итерационные (приближенные).
Прямые методы позволяют получить решение за конечное число арифметических операций. Если операции реализуются точно, то и решение будет точным (поэтому класс прямых методов еще называют точными методами). В итерационных методах решением является предел некоторой бесконечной последовательности единообразных действий.
В данном пособии описаны методы решения СЛАУ, у которых число уравнений совпадает с числом неизвестных.
35
Задана СЛАУ размерности m, которую можно записать в скалярном:
|
a11 ×x1+a12 ×x2 + ... + a1m ×xm = f1 |
|
|
|
||||||||||||||||||
|
|
|
×x1+a22 |
×x2 + ... + a2m ×xm = f2 |
|
|
|
|||||||||||||||
|
a21 |
|
|
(1.5) |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
... |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
×x |
+a |
m2 |
×x |
2 |
+ ... + a |
mm |
×x |
m |
= f |
m |
|
|||||||||
векторном: |
|
m1 |
|
1 |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a11 |
|
|
|
a12 |
|
|
|
|
|
|
a1m |
|
|
|
|
|
|
f1 |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a21 |
|
x + |
a22 |
x |
|
+ ... |
a2m |
|
x |
|
= |
|
f2 |
|
(1.5¢) |
|||||||
|
|
|
|
|
2 |
|
|
m |
|
|
|
|
||||||||||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
... |
|
|
|
... |
|
|
|
|
|
|
... |
|
|
|
|
|
|
... |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
am1 |
|
|
|
am2 |
|
|
|
|
|
|
amm |
|
|
|
|
|
|
fm |
|
|||
или матричном виде:
|
a11 |
a12 |
|
|
|
где |
a21 |
a22 |
A = |
|
|
|
|
|
|
|
am2 |
|
am1 |
A – матрица системы,
...
...
...
f
|
R |
= f |
, |
|
|
|
|
|
|
|
(1.5¢¢) |
|
Ax |
|
|
|
|
|
|
|
|||
a |
|
|
|
f |
|
|
|
|
x |
|
|
1m |
|
|
1 |
|
|
|
|
1 |
|
|
|
a2m |
R |
|
f2 |
|
, |
R |
|
x2 |
|
, |
|
|
|
, f |
= |
... |
|
x |
= ... |
|
|||
|
|
|
|
fm−1 |
|
|
xm−1 |
|
|
||
a |
|
|
|
|
|
|
|
|
xm |
|
|
|
|
fm |
|
|
|
|
|
||||
mm |
|
|
|
|
|
|
|
|
|
|
|
– вектор правых частей, x – вектор не-
известных. Назовем расширенной матрицей системы матрицу A′ , дополненную столбцом вектора правых частей:
a11 |
... |
a1m |
f1 |
|
|
|
|
|
|
a21 |
... |
a2m |
f2 |
|
A′ = |
|
|
... |
. |
|
|
|
|
|
|
... |
amm |
|
|
am1 |
fm |
|||
Система имеет решение, если det A ¹ 0. По определению решения, подставив вектор x в СЛАУ, получим m тождественных уравнений.
Эффективность способов решения системы (1.5) во многом зависит от структуры и свойств матрицы A: размерности, обусловленности, симметричности, заполненности (т.е. соотношения между числом ненулевых и нулевых элементов) и др.
36
4.1. Точные методы решения СЛАУ
При небольшой размерности системы m (m = 2, 3) на практике часто используют формулы Крамера решения СЛАУ:
x = |
det Ai |
(i = 1, 2, …, m). |
|
||
i |
det A |
|
|
|
Эти формулы позволяют находить неизвестные в виде дробей, знаменателем которых является определитель матрицы системы, а числителем – определители матриц Ai, полученных из A заменой столбца коэффициентов при вычисляемом неизвестном столбцом вектора правых частей.
Размерность системы (т.е. число m) является главным фактором, из-за которого формулы Крамера не могут быть использованы для численного решения СЛАУ большого порядка. При непосредственном раскрытии определителей решение системы с m неизвестными требует порядка m!m арифметических операций. Таким образом, для решения системы, например, из m = 100 уравнений потребуется совершить 10158 операций, что не под силу даже самым мощным современным ЭВМ.
Для решения небольших систем используют метод обратной матрицы. Если det A ¹ 0, то существует обратная матрица A–1 . По определению обратной матрицы: A A–1 = A–1 A = I, где I – единичная матрица. Если обратная матрица известна, то, умножая на нее СЛАУ слева, получим:
R |
= A−1 f , |
R |
= A−1 f , |
R |
= A−1 f . |
A−1 Ax |
I x |
x |
Следовательно, решение СЛАУ свелось к умножению известной обратной матрицы на вектор правых частей. Таким образом, задача решения СЛАУ и задача нахождения обратной матрицы связаны между собой, поэтому часто решение СЛАУ называют задачей обращения матрицы. Проблемы применения этого метода те же, что и при использовании метода Крамера: нахождение обратной матрицы – трудоемкая операция.
Наиболее популярным точным способом решения линейных систем вида (1.5) является метод Гаусса, или последовательного исключения неизвестных. Метод состоит из двух этапов: прямого и обратного. На первом этапе исходная система с
37
помощью эквивалентных преобразований сводится к системе с треугольной матрицей, на втором этапе решается система с треугольной матрицей. Эквивалентными преобразованиями будут следующие преобразования расширенной матрицы А′:
·перестановка строк;
·умножение строк на ненулевую константу;
·сложение строк.
Используя эти преобразования, перепишем исходную систему так, чтобы один из коэффициентов столбца был равен 1, а все коэффициенты, стоящие ниже, были равны 0.
Пусть в исходной системе уравнений
a |
( 0 ) |
×x |
|
+ a ( 0 ) |
×x |
|
+... + a ( 0 ) |
×x |
|
= |
f |
( 0 ) |
|
11 |
|
1 |
12 |
|
2 |
1m |
|
m |
|
|
1 |
a |
21( 0 ) |
×x1 |
+ a 22( 0 ) |
×x 2 |
+... + a 2( 0m) |
×x m = |
f 2( 0 ) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
... |
|
|
|
|
|
|
|
|
|
|
|
|
|
( 0 ) |
×x1 |
( 0 ) |
×x 2 |
( 0 ) |
×x m = |
|
( 0 ) |
||||
a m1 |
+ a m 2 |
+... + a mm |
f m |
|||||||||
первый элемент a11(0) ¹ 0 . Назовем его ведущим элементом пер-
вой строки. Поделим все элементы этой строки на a11(0) и исклю-
чим x1 из всех последующих строк, начиная со второй, путем вычитания первой (преобразованной), умноженной на коэффициент при x1 в соответствующей строке. Получим
x |
+a(1) |
×x |
|
+a(1) |
×x |
|
+ ... + a(1) |
×x |
|
= f (1) |
|
|
1 |
12 |
|
2 |
13 |
|
3 |
1m |
|
m |
1 |
|
|
a22(1) ×x2 +a23(1) |
×x3 + ... + a2(1)m ×xm = f2(1) |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
... |
|
|
|
|
|
|
|
|
|
|
|
|
|
(1) |
|
|
(1) |
|
|
(1) |
×xm |
(1) |
|
|
|
am2 |
×x2 +am3 |
×x3 + ... + amm |
= fm |
||||||
Если a22(1) ¹ 0 , то, продолжая аналогичное исключение, приходим к системе уравнений с верхней треугольной матрицей
38
x1+a12(1) ×x2 +a13(1) ×x3 + ... + a1(1m) ×xm =
x2 +a23(2) ×x3 + ... + a2(2m) ×xm = f2(2)
+ + (3) × = (3)
x3 ... a3m xm f3f1(1)
|
K K |
K |
|
|
|||
|
|
||
|
|
xm = fm(m) |
|
|
|
|
Из нее в обратном порядке находим все значения xi:
x |
|
= f |
(m) |
|
|
|
|
|
|
|
|
|
m |
|
m |
(m−1) |
|
(m−1) |
|
|
|
|
|
xm−1= |
|
|
×xm |
|
|
||||||
fm−1 |
|
- am−1m |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
K |
K |
|
|
K |
|
|
|
|
|||
|
|
(1) |
|
(1) |
|
(1) |
×x3 |
(1) |
×xm |
||
x1= f1 |
|
- a12 |
×x2 -a13 |
- ... - a1m |
|||||||
Процесс приведения к системе с треугольной матрицей называется прямым ходом, а нахождения неизвестных – обратным. В случае, если один из ведущих элементов равен нулю, изложенный алгоритм метода Гаусса неприменим. Кроме того, если какие-либо ведущие элементы малы, то это приводит к увеличению ошибок округления и ухудшению точности счета. Поэтому обычно используется другой вариант метода Гаусса – схема Гаусса с выбором главного элемента. Путем перестановки строк, а также столбцов с соответствующей перенумерацией коэффициентов и неизвестных добиваются выполнения условия:
aii(0) |
³ |
aij(0) |
, |
i, j = 1, 2, …, m, |
т.е. осуществляется выбор первого главного элемента. Разделив первую строку на главный элемент, как и прежде, исключают x1 из остальных уравнений. Затем для оставшихся столбцов и строк выбирают второй главный элемент и т.д.
Метод Гаусса – Жордано использует аналогичный прием с исключением элементов в столбцах матрицы таким образом,
чтобы перевести исходную систему |
R |
= f |
к |
R |
= f ¢ , где A′ – |
Ax |
A¢x |
диагональная матрица. Этот метод можно использовать для нахождения обратной матрицы, для чего в расширенную матрицу
39