

РАЗДЕЛ 4. СИСТЕМЫ УПРАВЛЕНИЯ
Вданном разделе студент должен:
изучить следующие темы: 4.1. Рулевое управление. 4.2. Тормозное управление.
ответить на вопросы для самопроверки;
ответить на вопросы тренировочного и контрольного тестов;
использовать материал раздела при выполнении контрольной работы №1
и№2;
использовать материал раздела при выполнении практических занятий №3 и №4;
использовать материал раздела при выполнении лабораторных работ №2.
4.1.Рулевое управление
В данной теме рассматриваются классификация и расчетные схемы элементов рулевого управления, требования к ним и их расчет.
Для изучения темы необходимо воспользоваться учебной литературой
[1], c. 430...466; [2], c. 143...166; [3], с. 98...112.
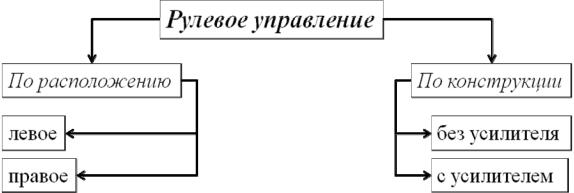
Рулевое управление – это совокупность устройств, осуществляющих поворот управляемых колес автомобиля. Служит для изменения и поддержания направления движения и обеспечивает его безопасность. Состоит из двух частей – рулевого механизма и рулевого привода.
Классификация рулевого управления
Классификация рулевого управления представлена на рис.27.
Рис. 27. Классификация рулевого управления
58

Требования к рулевому управлению
К рулевому управлению предъявляются следующие требования, которые должны обеспечивать:
1.Минимальный радиус поворота.
2.Угловое передаточное число рулевого управления.
3.Наименьший КПД.
4.Смягчать толчки и удары на рулевом колесе.
Рулевой механизм
Преобразует вращение рулевого колеса в поступательное перемещение рулевого привода. Служит для увеличения усилия водителя, прилагаемого к рулевому колесу, и передачи его к рулевому приводу.
Классификация рулевого механизма
Классификация рулевого механизма представлена на рис. 28.
Рис. 28. Классификация рулевого механизма
Требования к рулевому механизму
Рулевые механизмы должны обеспечивать:
1.Высокий прямой КПД и низкий обратный КПД.
2.Минимальный зазор в механизме.
3.Заданный характер изменения передаточного числа механизма.
Рулевой привод
Система тяг и рычагов, осуществляющая связь управляемых колес с рулевым механизмом. Служит для передачи усилия от рулевого механизма к управляемым колесам, обеспечивает правильный их поворот.
Классификация рулевого привода
Классификация рулевого привода по рулевой трапеции представлена на рис. 29.
59
Рис. 29. Классификация рулевого привода
Требования к рулевому приводу
Рулевой привод должен обеспечивать:
1.Правильное соотношение углов поворота колес.
2.Отсутствие автоколебаний.
3.Отсутствие самопроизвольного поворота управляемых колес при колебаниях автомобиля на неровностях.
Рулевые усилители
Требования к рулевым усилителям
Рулевые усилители должны обеспечивать:
1.Соответствие между углами поворота рулевого колеса и управляемых колес.
2.Пропорциональность между усилием на рулевом колесе и силами сопротивления повороту управляемых колес.
3.Возможность управлять автомобилем при выходе усилителя из строя.
4.Действие только в тех случаях, когда усилие на рулевом колесе превышает
25...100 МПа.
5.Минимальное время срабатывания.
6.Минимальное влияние на стабилизацию управляемых колес автомобиля.
7.Смягчение и поглощение толчков и ударов.
Параметры усилителя
Рабочая характеристика – зависимость между усилием на рулевом колесе Рр.к и моментом сопротивления Мс повороту управляемых колес.
Коэффициент эффективности – отношение усилия на рулевом колесе без усилителя к усилию на рулевом колесе при работающем усилителе
Показатели чувствительности:
Усилие на рулевом колесе – Рв.ус=20...50 Н.
Угол поворота необходимый для включения – αв.ус=10...15º.
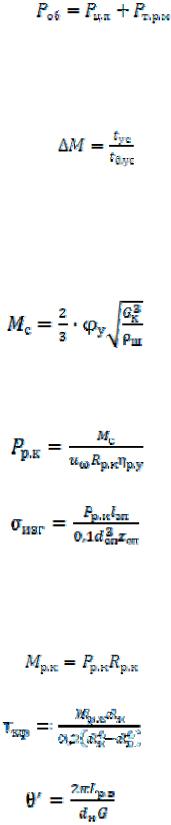
Показатель реактивного действия
, |
(127) |
где Мс – момент сопротивления повороту управляемых колес.
60
Показатель обратного включения
, |
(128) |
где Рц.п – усилие центрирующих пружин золотника; Рт.р.м – силы трения в рулевом механизме, приведенные к шаровому пальцу рулевой сошки при передаче усилия от рулевой сошки к рулевому колесу.
Показатель маневренности
, |
(129) |
где tус, tб.ус – время поворота с усилителем и без усилителя соответственно.
Расчет рулевого управления
Рулевое колесо
Момент сопротивления повороту
, |
(130) |
где φу=0,9...1,0 – коэффициент сцепления при повороте управляемого колеса на месте; Gк – нагрузка на колесо; ρш – давление воздуха в шине.
Усилие на рулевом колесе
. |
(131) |
Спицы рулевого колеса рассчитывают на изгиб |
|
, |
(132) |
где lсп – длина спицы; dсп – диаметр спицы; zсп – число спиц. |
|
Рулевой вал |
|
Момент на валу |
|
. |
(133) |
Напряжения кручения трубчатого вала |
|
. |
(134) |
Угол закручивания вала |
|
, |
(135) |
где dн, dв – соответственно наружный и внутренний диаметр вала.
61
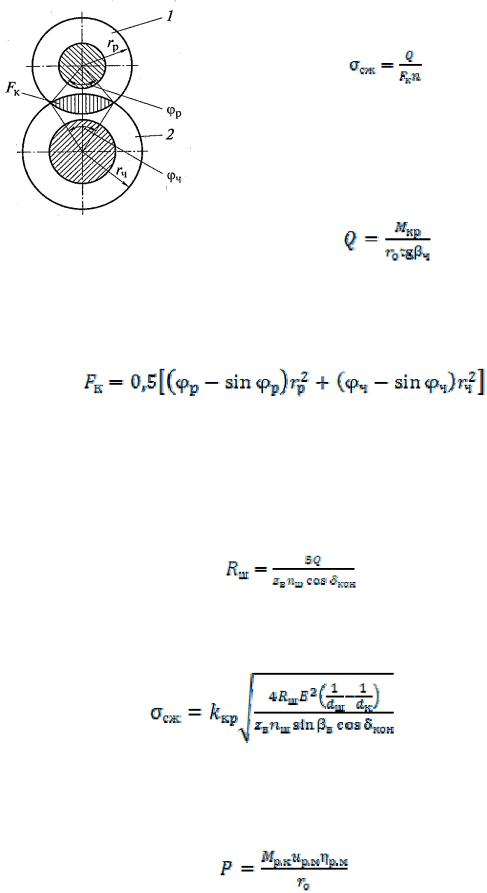
Червячно-роликовая рулевая передача
Контактные напряжения в зацеплении червяка и ролика при сжатии
, |
(136) |
где Q – осевая сила, действующая на червяк; Fк – площадь контакта одного гребня ролика, равная сумме площадей двух сегментов; n – число гребней ролика (рис. 30).
Осевая сила
Рис. 30. Расчетная |
, |
(137) |
|
|
|
схема червячно- |
где rо – начальный радиус червяка |
в наименьшем |
роликовой рулевой |
сечении; βч – угол подъема винтовой линии червяка. |
|
передачи |
|
|
|
Площадь контакта |
|
|
, |
(138) |
где φ – угол зацепления соответственно ролика и червяка; r – радиус зацепления соответственно ролика и червяка.
Винтореечная рулевая передача
Винт – шариковая гайка
Сжатие с учетом радиальной нагрузки на один шарик
, |
(139) |
где zв – число рабочих витков; nш – число шариков на одном витке; δкон – угол контакта шариков с канавками.
Прочность шарика определяют по контактным напряжениям
, |
(140) |
где kкр= 0,6...0,8 – коэффициент кривизны соприкасающихся поверхностей; Е – модуль упругости первого рода; d – диаметр соответственно шарика и канавки.
Сектор – рейка
Окружное усилие на зубьях сектора при отсутствии усилителя
, |
(141) |
где r0 – радиус начальной окружности сектора.
Окружное усилие на зубьях сектора при наличии усилителя
62
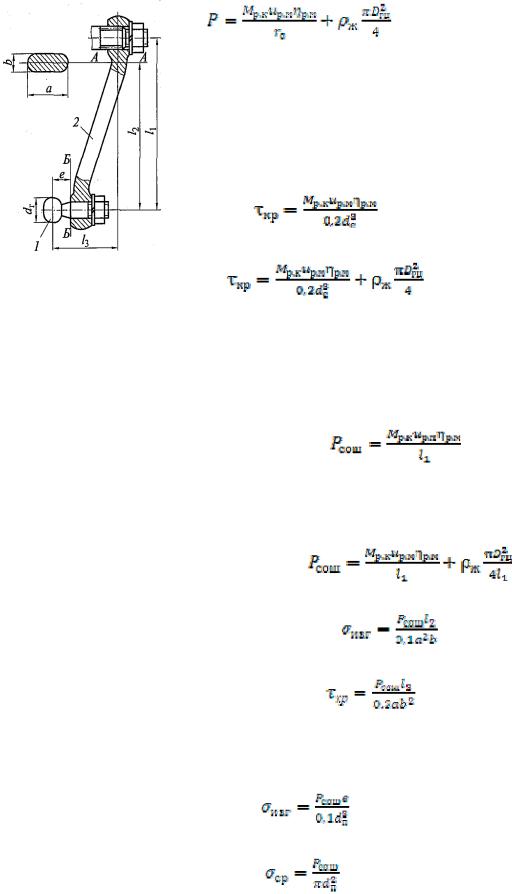
, |
(142) |
где ρж= 6...8 МПа – давление жидкости в гидроусилителе; Dгц – диаметр гидроцилиндра.
Рулевой привод
Вал рулевой сошки
Напряжения кручения без усилителя |
|
. |
(143) |
При наличии усилителя |
|
, |
(144) |
где dс – диаметр вала рулевой сошки.
Рулевая сошка
Максимальная сила, действующая на шаровой палец от продольной рулевой тяги без усилителя
|
, |
(145) |
|
где l1 – расстояние между центрами головок рулевой |
|
|
сошки (рис. 31). |
|
|
При наличии усилителя |
|
|
. |
(146) |
|
Напряжения изгиба в АА |
|
|
. |
(147) |
|
Напряжение кручения |
|
|
. |
(148) |
Рис. 31. Расчетная |
Шаровой палец сошки |
|
схема рулевой |
Напряжения изгиба |
|
сошки |
. |
(149) |
|
||
|
Напряжения среза |
|
|
. |
(150) |
Напряжения смятия
63
, |
(151) |
где е – плечо изгиба пальца; dп – диаметр пальца в опасном сечении; dг – диаметр шаровой головки пальца (рис. 31).
Продольная рулевая тяга
Напряжения сжатия |
|
, |
(152) |
где Fт – площадь поперечного сечения тяги. |
|
Критические напряжения |
|
, |
(153) |
где E – модуль упругости первого рода;  – момент инерции среднего трубчатого сечения; lт – длина тяги по центрам шаровых пальцев.
– момент инерции среднего трубчатого сечения; lт – длина тяги по центрам шаровых пальцев.
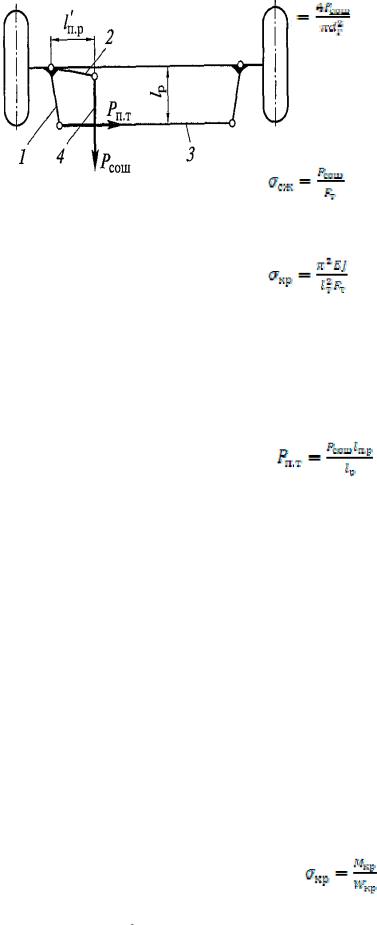
Поперечная тяга
Тяга нагружается силой |
|
, |
(154) |
где lп.р, lр – активная длина соответственно поворотного рычага и рычага поворотного кулака (рис. 32).
Рис. 32. Схема для расчета деталей рулевого привода:
1 – рычаг поворотного кулака; 2 – поворотный рычаг; 3 – поперечная тяга; 4 – продольная тяга.
Поворотный рычаг
Напряжения изгиба
 . (155)
. (155)
Напряжения кручения
, |
(156) |
где  - скручивающий момент;
- скручивающий момент;  - изгибающий момент; Wкр, Wизг – моменты сопротивления кручению и изгибу соответственно.
- изгибающий момент; Wкр, Wизг – моменты сопротивления кручению и изгибу соответственно.
64