

5.4 HCF Controlled Channel Access, Coexistence of Overlapping QBSSs |
109 |
5.4.1Prioritized Channel Access in Coexistence Scenarios
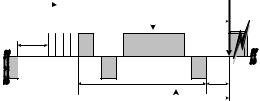
Figure 5.34 gives an example where more than one HC operate at the same time, in a coexistence scenario. A typical EDCF frame exchange is shown. One MSDU is delivered through contention-based channel access, during an EDCF-TXOP. Within this EDCF-TXOP, RTS, CTS, the data frame that is carrying the MSDU and the ACK are transmitted. In an isolated QBSS, the length of this EDCFTXOP is limited by the TXOPlimit to guarantee that the channel will be sufficiently often idle to allow the allocation of CAPs with some required delays.
The TXOPlimit is under control of the HC in that isolated QBSS. When QBSSs overlap, however, HCs can only control the duration of the EDCF-TXOPs within their own QBSS. That means that if one HC requires a small TXOPlimit, but the coexisting backoff entities of the overlapping QBSSs follow the larger TXOPlimit of a second HC, then the first HC will not meet its delay requirements.
In addition, after the end of an EDCF-TXOP, two or more HCs may attempt to allocate a CAP to deliver data immediately after the ongoing EDCF-TXOP with highest priority, as indicated in the right hand side of Figure 5.34. In this case, the first frames transmitted in the CAPs will collide, which is a substantial problem for the controlled channel access. In general, the probability of collisions increases with increasing durations of the EDCF-TXOPs, i.e., with an increased TXOPlimit. Note that the two HCs may require different TXOPlimits in their respective QBSSs.
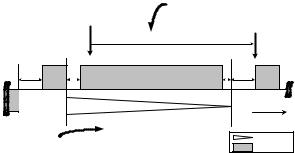
Figure 5.35 illustrates another obvious problem that occurs when more than one HC operate at the same time, in a coexistence scenario. The HC 1 needs to allocate a CAP at a point in time when the other HC 2 allocated a CAP already.
optimal CAP allocation time for HC 1
|
|
|
|
delayed start of CAP |
|
|
time |
|
|
collision |
|
|
|
allocation attempt |
|||
|
|
||||
|
|
|
|
|
|
AIFS[AC] |
RTS |
DATA (MSDU) |
|
|
|
||
busy |
|
CTS |
ACK |
channel |
|
||
|
EDCF-TXOP |
PIFS |
|
|
|
optimal CAP |
|
|
|
delayed start of CAP |
|||
allocation time |
|||
allocation attempt |
|||
for HC 2 |
|||
|
|
||
Figure 5.34: One of the problems in overlapping QBSSs: after the end of an EDCF-TXOP, both HCs may attempt to transmit immediately with highest priority. In this case, frames collide.
110 |
5. Evaluation of IEEE 802.11e with the IEEE 802.11a Physical Layer |
|
|
|
unwanted by HC 1 |
|
optimal CAP allocation |
|
|
time for HC 1 |
delayed CAP allocation |
|
|
time for HC 1 |
|
|
significantly delayed start of CAP |
PIFS |
CF-Poll |
SIFS |
CAP HC 2 |
aSlotTime |
PIFS |
CF-Poll |
|
HC 2 |
|
|
|
|
HC 1 |
busy |
|
|
|
|
|
|
channel |
|
|
|
|
|
|
|
|
|
NAV coverage from CF-Poll HC 2 |
|
|
time |
|
|
|
duration > EDCF-TXOPlimit |
|
|
|
not under control of HC 1 |
|
|
|
NAV (timer) |
||
|
|
|
transmission |
|||
|
|
|
|
|
|
|
Figure 5.35: One of the problems in overlapping QBSSs: HC 1 needs to allocate resources while the other HC 2 allocates resources through a granted TXOP already. The duration of the ongoing TXOP is not limited by the TXOPlimit. As a result, the HC 1 may observe large delays.
The duration of the ongoing CAP is not limited by the TXOPlimit, and therefore not under control of the HC 1. As a result, the HC 1 observes significant delays when attempting to allocate a CAP, and may even have to give up the CAP allocation attempt due to the increased delays.
No HC operating in overlapping QBSSs can meet its requirements, as soon as coexisting HCs allocate CAPs with durations larger than the TXOPlimit that is individually defined by the respective HC.
5.4.2Saturation Throughput in Coexistence Scenarios
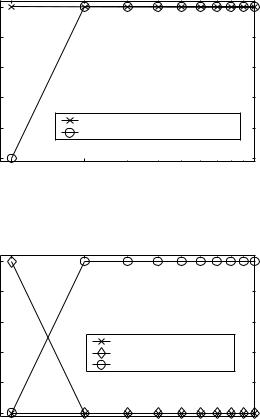
The modified version of Bianchi’s legacy 802.11 model is used here to analyze the identified problems, see Section 5.1.2.1, p. 65. Figure 5.36 shows the collision and transmission probabilities p,τ in a generic slot time for an HC, as a function of the number of HCs in overlapping QBSSs. This figure should be compared to Figure 5.5, p. 69, where the same probabilities are shown for the contentionbased channel access of the HCF, i.e., the EDCF, versus the number of contending backoff entities. As expected, due to the lack of contention in the controlled channel access, the collision probability is p = 0 for one HC, and p =1 if more than one HC allocate CAPs. As slots are never idle when one or more HCs allocate as many CAPs as possible (in saturation), the probability that the HC transmits at a generic slot is τ =1 for any number of HCs.
Figure 5.37 shows the respective probabilities that a generic slot is idle, busy with a collided frame, or busy with a successfully allocated CAP, versus the number of HCs. This figure should be compared to Figure 5.6, p. 70, where the same probabilities are shown for the EDCF. As expected, in saturation, slots are never idle. Further, the channel is always busy with unsuccessful transmissions, as soon as
5.4 HCF Controlled Channel Access, Coexistence of Overlapping QBSSs |
111 |
more than one HC attempt to allocate CAPs. One isolated HC will always successfully allocate its CAPs. Figure 5.38 shows the resulting saturation throughput for different frame body sizes and PHY modes, vs. the number of HCs in overlapping QBSSs. It is assumed that one frame per CAP is exchanged. One HC can achieve different saturation throughput for different frame body sizes and PHY modes, similar to the EDCF. However, in contrast to the EDCF, as soon as the number of HCs increases beyond one, the throughput drops down to zero, since all CAP allocation attempts will fail if two or more HCs operate in saturation in the coexistence scenario.
prob. τ, p
1 |
|
|
0.8 |
|
|
|
CW=0, AIFSN=1 |
|
0.6 |
|
|
0.4 |
|
|
0.2 |
τ = prob(HC attempts allocation) |
|
p = prob(collision) |
|
|
|
|
|
0 |
2 |
10 |
1 |
||
|
number of HCs allocating CAPs |
|
Figure 5.36: Collision and transmission probability p,τ in a generic slot time for an HC, as functions of the number of HCs in overlapping QBSSs.
|
1 |
|
|
0.8 |
|
|
|
CW=0, AIFSN=1 |
prob. |
0.6 |
|
0.4 |
prob(CCAidle) |
|
|
prob(success|CCAbusy) |
|
|
|
prob(collision|CCAbusy) |
|
0.2 |
|
|
0 |
|
1 |
2 |
10 |
|
number of HCs allocating CAPs |
|
Figure 5.37: Probability that a generic slot is idle, busy with a collided frame, or busy with a successfully transmitted frame, as functions of the number of HCs in overlapping QBSSs.