

4.3 Hybrid Coordination Function, Controlled Channel Access |
55 |
4.3Hybrid Coordination Function, Controlled Channel Access
The controlled channel access of the HCF extends the EDCF access rules by allowing the highest priority channel access to the HC during the contention free period and the contention period (CFP and CP). The details about the controlled channel access are summarized in this section.
4.3.1Controlled Access Period
In 802.11e, a TXOP can be obtained by the HC via the controlled channel access. In this case the TXOP is referred to as Controlled Access Phase (CAP).
The HC may allocate TXOPs to itself to initiate MSDU Deliveries whenever it requires, after detecting the channel as being idle for PIFS, and without backoff. To give the HC the higher priority over the legacy DCF and the EDCF access, AIFSN [AC ]cannot have a value smaller than one for any AC. During CP, each TXOP begins either when the channel is determined to be available under the EDCF rules, i.e., after AIFS [AC ] plus the random backoff time of at least one slot, or when a backoff entity receives a polling frame, the QoS CF-Poll, from the HC, hence, starting a CAP. The QoS CF-Poll from the HC can be transmitted after a PIFS idle period, without any backoff, by the HC. Therefore, the HC can issue polled TXOPs, referred to as CAPs, in the CP using its prioritized channel access. During the CFP, the starting time and maximum duration of each CAP is also specified by the HC, again using the QoS CF-Poll frames. During CFP, 802.11e backoff entities will not attempt to access the channel without being explicitly polled, hence, only the HC can allocate CAPs by transmitting QoS CF-Poll frames, or by immediately transmitting downlink data. CAP allocations may be delayed by the duration of an EDCF-TXOP, as illustrated in Figure 4.10.
|
|
tolerated by HC 1 |
|
optimal CAP allocation |
delayed CAP allocation |
|
time for HC 1 |
time for HC 1 |
|
|
|
time |
delayed start of TXOP |
|
QoS CF-Poll
AIFS[AC] |
RTS |
DATA (MSDU) |
|
|
|
|
|
||
busy |
CTS |
ACK |
|
|
channel |
|
|
||
|
|
PIFS |
CAP |
|
|
EDCF-TXOP gained by contention-based |
|||
|
|
allocation |
||
|
channel access during contention period |
|
||
|
|
|
||
 duration < EDCF-TXOPlimit
duration < EDCF-TXOPlimit
under control ofHC 1
Figure 4.10: CAP allocation. Note that any 802.11e frame exchange will not take longer than the TXOPlimit, which is the limit for all EDCF-TXOPs and under control of the HC.
56 |
4. IEEE 802.11e Hybrid Coordination Function |
The HC controls the maximum duration of EDCF-TXOPs within its QBSS by announcing the TXOPlimit [AC ] for all ACs via the beacon. Therefore, it can allocate CAPs at any time during the CP, and the optional CFP. When very small MSDU Delivery delays are required, CF-Polls may be transmitted a duration of TXOPlimit [AC ] earlier than the optimal CAP allocation time to avoid any MSDU Delivery delay imposed by EDCF-TXOPs at all. The largest TXOPlimit [AC ] of the four ACs must be considered, however.
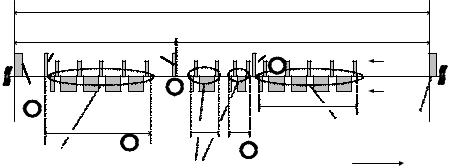
Figure 4.11 illustrates an example of a superframe that includes a CFP and a CP. The superframe starts with a beacon transmitted by the HC, see Figure 4.11, (1). During the CFP, i.e., the first part of the superframe, the backoff entities only transmit upon being polled by the HC. Indicated with (2) is the transmission of a fragmented MSDU within CFP. The CFP is optional and ends with the CF-End frame transmitted by the HC as shown at (3).
During the following CP, all backoff entities attempt to transmit through the contention-based channel access of the HCF, i.e., the EDCF. EDCF-TXOPs are obtained through contention, and two such EDCF-TXOPs are indicated with (4). During the CP, the HC can also poll backoff entities to allocate CAPs. This is in the figure shown as an example. Following the two EDCF-TXOPs, the HC polls a backoff entity to obtain a CAP during which a fragmented MSDU is transmitted as shown at (5). The duration of CAPs is not limited by any parameter specified in the standard. The HC is responsible for determining the duration of a CAP. However, any CAP must not exceed the TBTT. In addition, regulatory requirements may limit the duration of a CAP if 802.11e stations operate in certain regulatory domains.
|
|
802.11e periodic superframe |
|
|||
|
(duration is implementation dependent and not specified by 802.11) |
|
||||
|
optional Contention Free Period |
|
Contention Period |
|
||
|
(polling through HCF) |
|
(listen before talk and polling through HCF) |
|
||
|
QoS CF-Poll |
CF-End |
|
QoS CF-Poll |
transmitted |
|
|
|
|
|
5 |
by HC |
|
Beacon |
3 |
|
transmitted by |
|||
|
|
|
stations |
|||
|
|
|
|
CAP |
||
|
1 |
|
|
|
||
|
|
|
|
Beacon |
||
|
|
|
|
RTS/CTS/ |
||
TBTT |
CAP |
TXOP |
TXOP |
TBTT |
||
|
||||||
|
2 |
|
|
fragmented data/ACK |
||
|
|
4 |
(polled by HC) |
|
||
|
RTS/CTS/fragmented |
|
|
|
||
|
RTS/CTS/data/ACK |
|
|
|||
|
data/ACK (polled by HC) |
time |
|
|||
|
|
(after contention) |
|
|||
Figure 4.11: Example of an 802.11e superframe where the HC grants TXOPs in Contention Free Period and Contention Period. The duration of the superframe is not specified in the standard.