

21
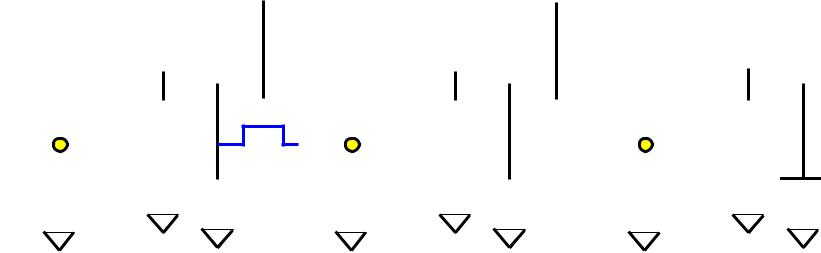
1. AT t = 0− LET Vin = VDD => Vout = VOL |
VDD |
|
|
||||
|
D |
|
|
||||
M1 is LIN, M2 is SAT, M3 is SAT |
|
Vx |
M3 |
D |
|
||
If I |
|
≈ 0 |
iCs |
S |
|
||
|
|
|
|
||||
D3 |
|
|
M2 |
|
|||
=> VGS3 - VT3(Vx) = 0 |
CS |
Cboot |
iCboot |
S |
Vout |
||
i.e. |
|
|
|
|
|
D |
|
Vx = VDD − VT 3(Vx ) |
|
|
|
|
|||
|
Vin |
|
M1 |
Cout |
|||
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
2. AT t = 0, LET Vin |
switch from “1” to “0” |
S |
||
|
|
|
||
|
|
|
|
|
M1 -> OFF, Vout -> INCREASES
+ Vout causes Vx TO INCREASE due to Cboot and diode M3 to become reverse biased such that ID3 = 0. Then iCs + iCboot ≈ 0
iCs ≈ - iCboot => |
CS |
dV |
≈ Cboot |
d(Vout − Vx ) |
||||||||
x |
|
|
||||||||||
dt |
dt |
|||||||||||
|
|
|
|
|
|
|
|
|
||||
|
dVx |
≈ |
|
Cboot |
|
|
dVout |
Find Vx NEEDED for Vout = VDD |
||||
|
(CS + Cboot ) |
|
||||||||||
|
dt |
dt |
|
|
||||||||
Kenneth R. Laker, University of Pennsylvania
22
Find Vx NEEDED for Vout = VDD |
|
|
|
|||||||
dV |
|
C |
|
|
dV |
|
dVx » |
Cboot |
||
|
dt |
» (CS + Cboot ) |
dt |
=> |
|
dVout |
||||
|
(CS + Cboot ) |
|||||||||
|
x |
|
|
boot |
|
out |
|
|
|
|
INTEGRATING: Vout: VOL -> VDD AND Vx: VDD - VT3(Vx) -> Vx
Vx |
» |
|
|
Cboot |
VDD |
|
|
ò dVx |
|
|
ò dVout |
||||
|
|
|
|
|
|
|
|
VDD −VT 3 |
|
|
(CS + Cboot ) |
VOL |
+ Cboot )(VDD - VOL ) |
||
Vx = (VDD |
- VT 3(Vx )) + (CS |
||||||
|
|
|
|
|
|
Cboot |
|
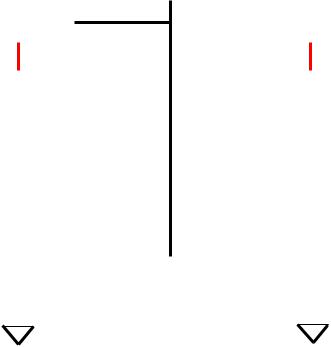
FOR Cboot >> CS the max value for Vx:
Vx (max) = 2VDD − VT 3(Vx ) − VOL
The min value of Vx is that value required to maintain M2 ON (VGS2 = Vx - VDD = VT2n, i.e.
= (VDD |
- VT 3(Vx )) + (C + C |
|
)(VDD - VOL ) |
||
|
|
Cboot |
|
|
|
Kenneth R. Laker, University of Pennsylvania |
|
S |
boot |
|
|
|
|
|
|
|
|

23
= (VDD |
− VT 3(Vx )) + (C + C |
|
)(VDD − VOL ) |
||
|
|
Cboot |
|
|
|
|
|
S |
boot |
|
|
Vx(min) determines the required capacitance ratio, i.e.
|
|
|
Cboot |
|
|
|
= |
VT 2(Vout = VDD ) + VT 3(Vx ) |
||||||||
|
(C |
|
+ C |
boot |
) |
|
|
|
(V − V |
) |
|
|
||||
|
|
S |
|
|
|
|
|
|
|
DD OL |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
Cboot |
= |
|
|
|
|
|
VT 2(Vout = VDD ) + VT 3(Vx ) |
|
||||||
|
|
C |
S |
|
|
V |
|
|
− V − V (V = V ) − V (V ) |
|
||||||
|
|
|
|
|
DD |
|
|
OL |
T 2 out |
DD T 3 x |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
MD: “dummy” nMOS enhancement device to realize Cboot >> CS
VDD


 M3
M3
Vx 

 M2
M2
MD
Cboot Vout
CS = Cgb2 + Csb3 |
|
|
|
|
|
|
|
|
|
V |
|
|
|
|
|
|
M1 |
||
in |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Kenneth R. Laker, University of Pennsylvania
24
SYNCHRONOUS DYNAMIC CIRUIT TECHNIQUES
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
COMB |
|
|
|
F1 |
|
|
|
|
|
|
COMB |
|
|
|
|
|
|
|
COMB |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
LOGIC |
|
|
|
|
|
|
|
LOGIC |
|
|
|
|
|
|
|
|
|
LOGIC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
B |
|
|
|
|
|
|
1 |
|
C |
|
|
|
|
|
|
2 |
|
D |
|
|
|
|
|
|
|
3 |
|
|
|
F2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
φ |
1 |
|
|
|
|
|
|
|
φ2 |
|
|
|
|
|
φ |
1 |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
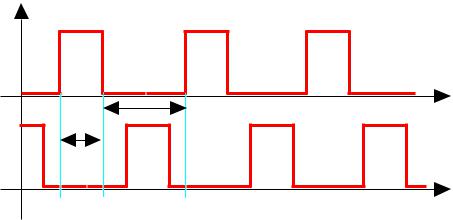
φ1, |
φ2 NON-OVERLAPPING CLOCKS |
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
φ1 |
|
phase 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
t
φ2
t
phase 1
LOGIC LEVELS DURING INACTIVE CLOCK PHASE ARE STORED ON INPUT CAPS
Kenneth R. Laker, University of Pennsylvania
25
VDD |
VDD |
VDD |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
φ |
1 |
|
|
|
|
|
φ |
2 |
|
|
|
|
|
|
φ |
1 |
|
|
|
|
|
Vout |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Cout3 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Vin |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Cout1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Cout2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
Cin1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Cin2 |
|
|
|
|
|
|
|
|
|
|
|
|
Cin3 |
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
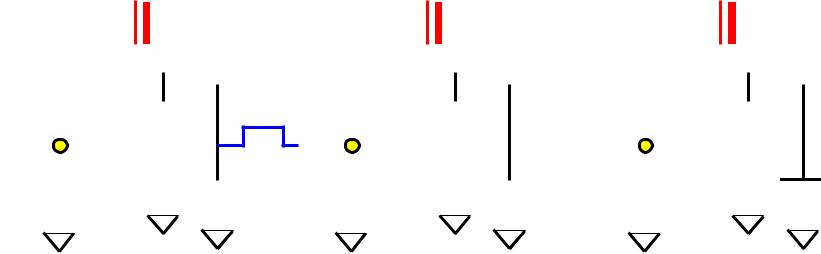
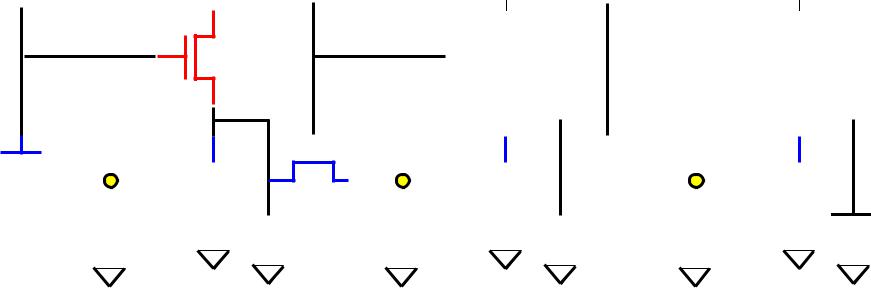
3 - STAGE DEPLETION LOAD DYNAMIC SHIFT REGISTER
MAX CLOCK FREQUENCY IS DETERMINED BY SIGNAL PROPOGATION DELAY THROUGH ONE INVERTER STAGE
Kenneth R. Laker, University of Pennsylvania
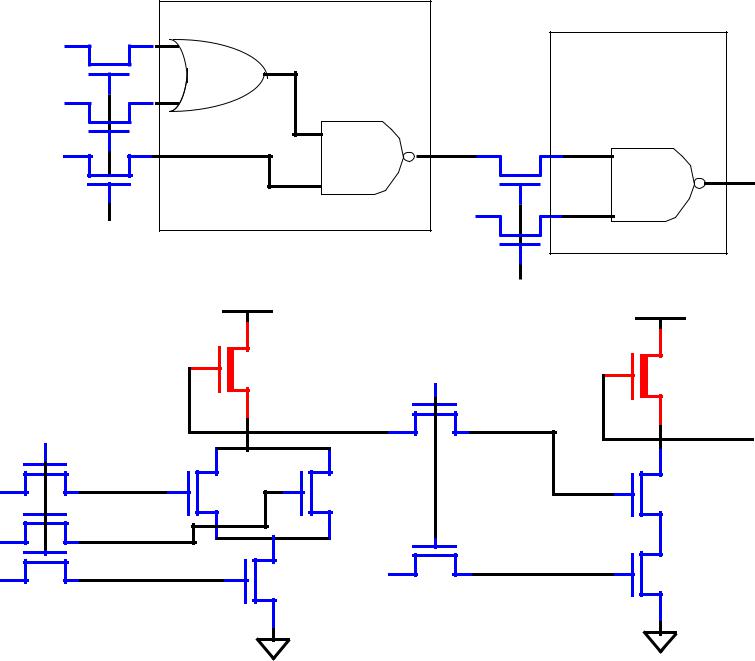
2 - STAGE SYNCRONOUS COMPLEX LOGIC CIRCUIT |
26 |
|||
|
||||
A |
STAGE 1 |
|
|
|
|
|
STAGE 2 |
|
|
|
|
|
|
|
B |
|
|
|
|
C |
|
|
F1 |
|
|
φ1 |
D |
|
|
|
|
|
||
|
VDD |
φ2 |
V |
|
|
|
|
DD |
|
|
|
φ2 |
|
|
φ1 |
|
|
F1 |
|
A |
|
|
|
|
B |
|
|
|
|
C |
|
D |
|
|
Kenneth R. Laker, University of Pennsylvania
ENHANCEMENT - LOAD DYNAMIC SHIFT REGISTER |
27 |
|||||||||||||||||||||||||
|
|
|
|
|||||||||||||||||||||||
|
VDD |
|
φ |
|
VDD |
|
|
φ |
VDD |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
φ2 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
φ1 |
|
|
|
|
|
V |
out1 |
|
|
|
|
|
|
Vout2 |
|
|
|
|
|
Vout3 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Cout3 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Vin |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Cout1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Cout2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
Cin1 |
|
|
|
|
|
|
|
|
|
|
|
|
Cin2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Cin3 |
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
φ1 HIGH: Vin transfers to Cin1, 1st and 3rd stage loads are OFF.
φ2 HIGH: 1st stage load turns ON , 1st stage output achieves its valid
logic level, and Vout1 is trasfers to Cin2.
φ1 HIGH: Vout2 transfers to Cin3, next Vin transfers to Cin1(pipeline), 1st and 3rd stage loads are OFF
VOL -> kdriver/kload => RATIOED DYNAMIC LOGIC
Kenneth R. Laker, University of Pennsylvania
28
VDD |
|
VDD |
|
|
|
|
φ1 |
||||||||
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
φ2 |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
φ1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Z |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
nMOS |
|
|
|
|
|
|
|
|
nMOS |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
B |
|
|
|
|
|
|
|
|
|
LOGIC |
|
|
|
|
|
|
|
|
LOGIC |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
C |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
D |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
GENERAL CIRCUIT STRUCTURE OF RATIOED SYNCRONOUS
DYNAMIC LOGIC
Kenneth R. Laker, University of Pennsylvania
|
ENHANCEMENT - LOAD DYNAMIC SHIFT REGISTER |
29 |
|||||||||||||
φ |
VDD |
φ2 |
VDD |
φ1 |
VDD |
|
|||||||||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Vout1 |
|
|
|
|
|
|
Vout2 |
|
|
|
|
Vout3 |
||||||||
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Cout3 |
||
Vin |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Cout1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Cout2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
Cin1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Cin2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Cin3 |
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
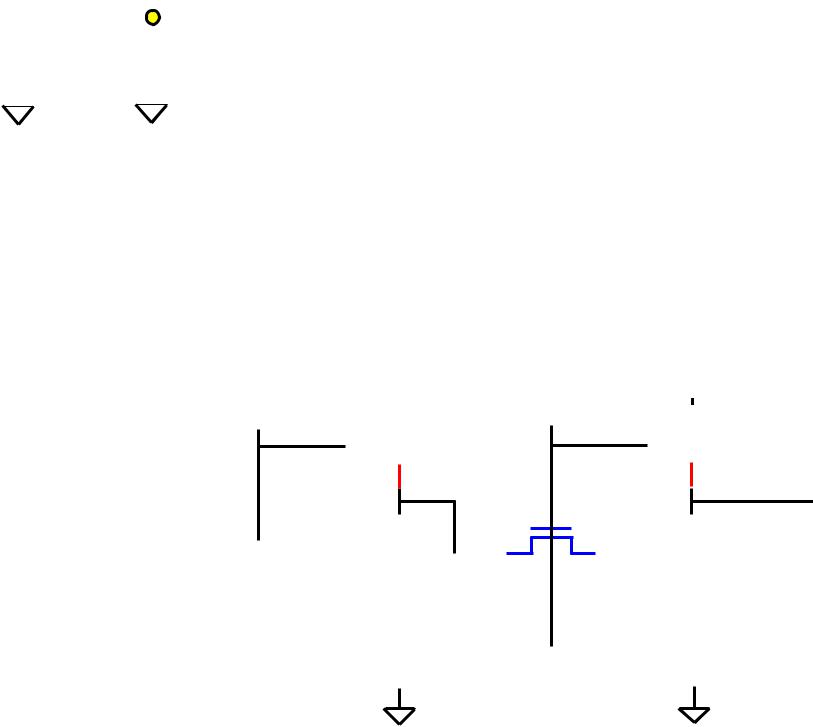
Cini << Couti-1 for i = 2, 3 => minimize charge sharing
φ1 HIGH: Vin transfers to Cin1, 1st and 3rd stage loads are ON, 1st stage output Vout1 achieves its valid level.
φ2 HIGH: Vout1 transfers to Cin2, 2nd stage load turns ON If Vout1 = HIGH: This level transfers to Cin2.
If Vout1 = LOW: Cout1 fully discharges to Vout1 = 0 due to HIGH level stored on Cin1.
φ1 HIGH: Vout2 transfers to Cin3, next Vin transfers to Cin1(pipeline). VOL -> 0 => RATIOLESS DYNAMIC LOGIC
Kenneth R. Laker, University of Pennsylvania
|
|
|
|
|
|
|
φ2 |
|
|
|
|
|
|
φ2 = 0: Qout1 |
= Cout1Vb and Qin2 = Cin2Va |
30 |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
V |
|
|
|
|
Va |
φ2 = 1: Qtotal |
= Cout1Vb + Cin2Va and Ctotal = Cout1 + Cin2 |
||||||||||||||||||||||||||||||
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
b |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
The resulting voltage across Ctotal is |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
Cout1 |
|
|
|
|
Cin2 |
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V = |
|
|
Qtotal |
= |
Cout1Vb + Cin2Va |
|
|
|
|||||||||||||
|
|
|
CHARGE |
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
Cout1 + Cin2 |
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
R |
Ctotal |
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
SHARING |
If Vb = VDD and Va |
<< Vb => VR |
≈ |
Cout1VDD |
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Cout1 |
+ Cin2 |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
VR ≈ VDD if Cin2 << Cout1 |
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
GENERAL CIRCUIT STRUCTURE OF RATIOLESS SYNCRONOUS |
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
DYNAMIC LOGIC |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
VDD |
|
|
|
|
|
VDD |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
φ1 |
|
|
|
|
|
|
|
φ2 |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Z
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
nMOS |
|
|
|
|
|
|
|
|
nMOS |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
LOGIC |
|
|
|
|
|
|
|
|
LOGIC |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
2 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
D |
||||||||||||
Kenneth R. Laker, University of Pennsylvania