

Глава 4. Реализация программного обеспечения и результаты имитационного моделирования алгоритма нечёткого контроллера.
4.1. Реализация алгоритма нечёткого контроллера высокотемпературных операций.
В результате работы создано программное обеспечение для имитационного моделирования обучения и работы нечеткого контроллера, управляющего высокотемпературными операциями в диффузионной печи, на основе сети обратного распространения.
Было разработано две программы, моделирующие:
стандартную сеть обратного распространения с сигмоидальной активационной функцией.
оптимизированную сеть обратного распространения с Гауссовской активационной функцией.
Каждая из программ представляет собой единый блок, содержащий интерфейс ввода-вывода информации, индикации процесса обучения и сохранения полученных результатов.
Входная информация - это входные лингвистические переменные. Для контроллера, выбирающего параметры высокотемпературной операции это данные об исходной операции ионного легирования: E - энергия (keV), D - доза (см-2), примесь (1 - Бор,2 - Фосфор,3 - Мышьяк), а также желаемые результаты после термической обработки: rs - поверхностное сопротивление (Ом/кв), Xj - глубина разгонки (мкм). В случае обучающих векторов к этим данным добавляются требуемые целевые выходные значения: T - время (мин), t - температура (°С), среда (1 - О2, 2 - N2). Каждому типу входных данных предназначено окно вывода. В программе моделирования стандартной сети обратного распространения каждое входное значение дополнительно разбивается на составляющие его цифры (например ‘1234 ® ‘1’,’2’,’3’,’4’). Эти цифры сгруппированы по типам входных данных. Кроме ручного ввода имеется возможность загрузки данных через файл. В этом случае для каждого типа входных значений создается файл, имеющий упорядоченную по столбцу структуру.
Работа программы моделирования стандартной сети обратного распространения. Смоделированная в этой программе сеть представляет собой пятислойную структуру, показанную на рис. 4.1. При запуске программы происходит начальная инициализация всех значений весов сети произвольными значениями, лежащими в диапазоне от 0 до 1. Сразу после запуска программы можно начать ввод данных вручную или загрузить уже готовое состояние сети из файла. В режиме обучения сети входные данные это обучающие вектора, состоящие из входных и целевых выходных значений. Для обучения сети необходимо ввести массив обучающих векторов, который отображает обучаемый нами сегмент. Для контроллера диффузионной печи это типы создаваемых разгонки примеси областей (р+ сток/исток, N карман, P карман, n+ сток/исток). Также перед началом обучения выставляется начальное значение коэффициента обучения (обычно это значение лежит в пределах от 0,1 до 1) и количество циклов обучения.
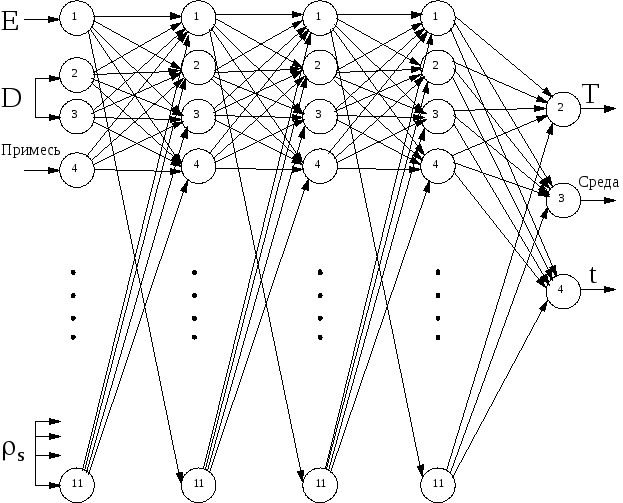
Рис. 4.1
Цикл обучения включает в себя полный перебор всего массива обучающих векторов. Каждый вектор делает прямой проход по сети, при этом вычисляются текущие значения выхода сети и обратный проход по сети, при этом происходит корректировка значений весов сети. После каждого цикла обучения происходит автоматическая запись в файл текущих значений весов сети и промежуточных вспомогательных значений для каждого элемента сети.
В процессе обучения на экран выводится процент выполненной работы и текущие значения обрабатываемого вектора и получаемых выходных значений. В режиме работы обученная ранее сеть на основе вводимых входных данных дает рекомендации выходных значений.
Работа программы моделирования оптимизированной сети обратного распространения. Структура сети показана на рис. 4.2. Основное отличие программы моделирования оптимизированной сети заключается в начальной инициализации элементов сети и алгоритме ее обучения. При запуске программы происходит инициализация элементов. Присвоение им начальных распределений функций принадлежности (рис 4.3) и задание структуры связей сети (рис. 4.2) выполняется по рекомендованной экспертами системе правил работы контроллера диффузионной печи.
Программы написаны на языке «Delphi v1.02» фирмы Borland Int., для работы в операционной среде «Windows-3.11». Тексты основных модулей программ приведены в Приложении 1.

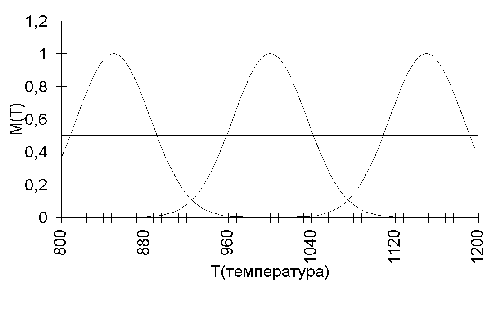
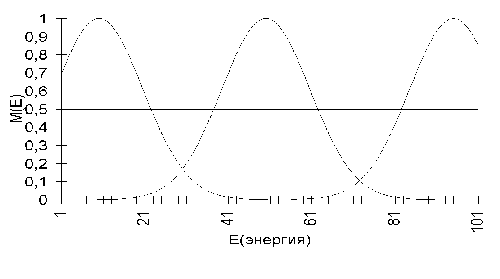

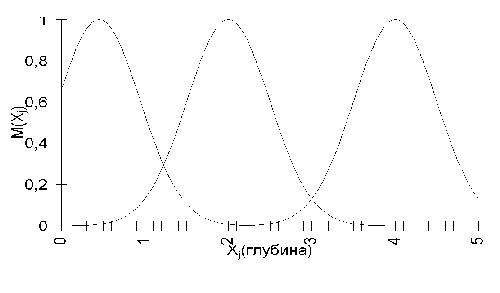
Функции принадлежности Рис. 4.3
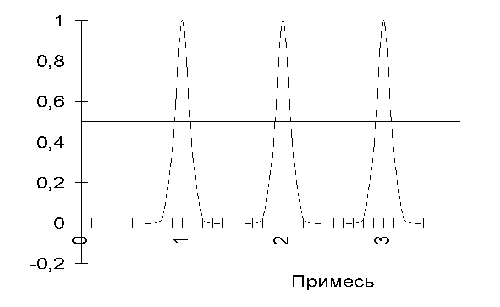
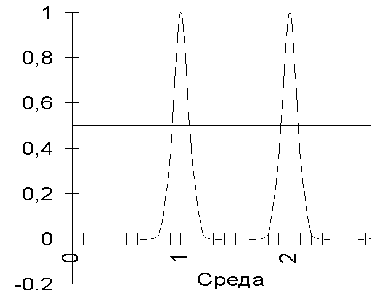
продолжение Рис. 4.3

