все билеты по сопромату
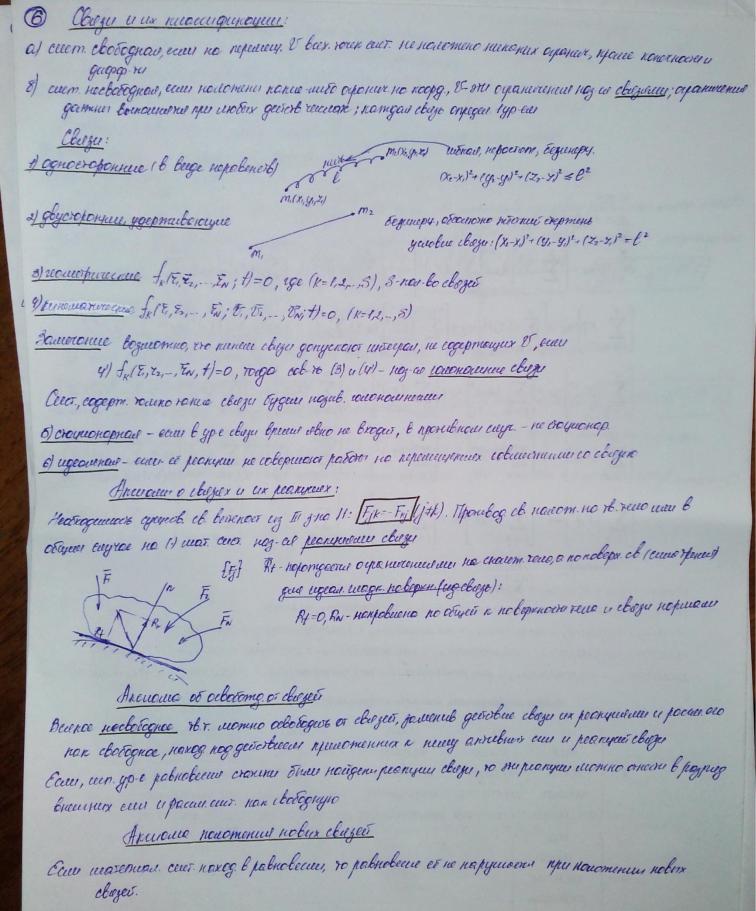
.pdf6. Несвободные системы материальных точек. Связи и их классификация.
Система свободная – если на перемещение и скорости всех точек системы не наложено никаких ограничений кроме требования конечности и дифф-сти. Система несвободная – если наложены какие-либо ограничения на координаты и скорости, эти ограничения называются связями.Условия связи должны выполняться для любых действующих на систему сил. Каждая связь определяется одним ур-нием (условием).1. Связи, условия которых задаются в форме неравенств, называются односторонними (неудерживающие). Дана гибкая нерастяжимая длиной L нить с координатами
концов: m1(x1, y1, z1) и m2
.Дан стержень длиной L,
(x |
, y |
, z |
|
2 |
2 |
|
2 |
(x |
x ) |
2 |
|
|
|||
2 |
|
1 |
|
) .
(x2 ( y2
x ) |
2 |
|
|
1 |
|
y ) |
2 |
|
|
1 |
|
( y2 (z2
y ) |
2 |
|
|
||
1 |
|
|
z ) |
2 |
|
|
|
|
1 |
|
|
(z2 z1) |
2 |
l |
2 |
.2. |
||
|
|
|||||
l |
2 |
.3. Связи вида |
||||
|
||||||
двухсторонняя связь
f |
k |
(r , r ,..., r |
,t) 0 |
, где |
||
|
1 |
2 |
n |
|
|
|
k1,2,..., S ; S – кол-во связей. В условия связей скорости мат. точ. не входят, такие точки называют
–геометрическими.1) и 2) – геом.4. Кинематические связи – связи, в условия которых входит
скорость. |
fk (r1, r2 ,..., rn |
допускает интеграл gk
;v ,v |
,...,v |
;t) 0 |
|
1 |
2 |
n |
|
(r1,r2 ,...,rn ;t) 0
, k 1,2,..., S .Возможен случай когда, ур-ние связи
не содержащий скоростей, тогда совокупность всех геом. и
инегр-мых кинемат. связей образуют голономные связи.5. Связь стационарна, если время t не входит явно в уравнение системы (связи). В противном случае связь называют нестационарной.6. Связь идеальна, если её реакции не совершают работы на перемещениях, совместимых со связями, в противном случае связь неидеальна.
7. Основные понятия статики. Условия
Рассмотрим сист. не свободных точек m1,
равновесия системы материальных точек.
m2 ,...mn ; r1, r2 ,..., rn .Движение системы описывается
md 2rj dt2
F |
j |
|
R |
j |
|
.
F |
j |
|
- главный вектор всех активных сил,
R |
j |
|
- главный вектор всех реактивных сил,
прилож. к j – ой массе. Активные силы – заданы, реактивные – надо найти.Опр. равновесии, если равен нулю главный вектор всех активных и реактивных сил
мат.
F |
j |
|
|
|
точка нах. в
Rj |
0 . |
Сист. мат. точек нах. в равновесии, если каждая ее точка нах. в равн.Опр. сист. нах. в покое, если все ее точки неподвиж.Теорема: если сист. нах. в равновес., то и любая ее подсистема тоже нах. в равн.Теорема: если сист. нах. в равн, то все ее точки совершают равномерн. прямолин. движ. отн. инерц. сист. коорд.Состояние равновесия – динамич. хар-ка, сост. покоя – кинематич. хар-ка (понятия отождетв. при 0-вых нач. усл.).Необх. усл. равновес. сис. мат. точек т. здесь много ф-ул и преобраз, все они рассм. все силы для кажд. точки 1, …, N.В итоге получ. условие:
n |
|
e |
e |
(Fj |
Rj |
j 1 |
|
) F
0
, где F - главный вектор всех внешних активных и реактивных сил, прилож. к
системе.Итак: 1. необх. усл.: F 0 |
, или F |
0 |
, F |
0 |
, F |
|
x |
|
y |
|
z |
главный вектор всех внешних активных и реактивных сил,
0 |
.Теорема: Если сист. нах. в равн., то |
прилож. к системе = 0.2. необх. условие.
равенство нулю гл. момента всех внеш. сил
F |
j |
R |
j |
0 |
|
|
|
n |
|
[rj |
(Fj |
j 1 |
|
R |
)] |
j |
|
0
. Разложи для каждой
точки сист., получишь, что все члены, содержащ. моменты внутр. сил взаимоуничтож.
n |
(Fj Rj )] G 0 , или G 0 , или Gx 0 , Gy 0, Gz 0 , или momx 0 , momy |
|
[rj |
||
j 1 |
|
|
momz |
0 . Теорема: если сист. нах. в равновес., то главный момент всех внеш. активных и |
|
реактивн. сил отн. произвол. полюса = 0.
0
,
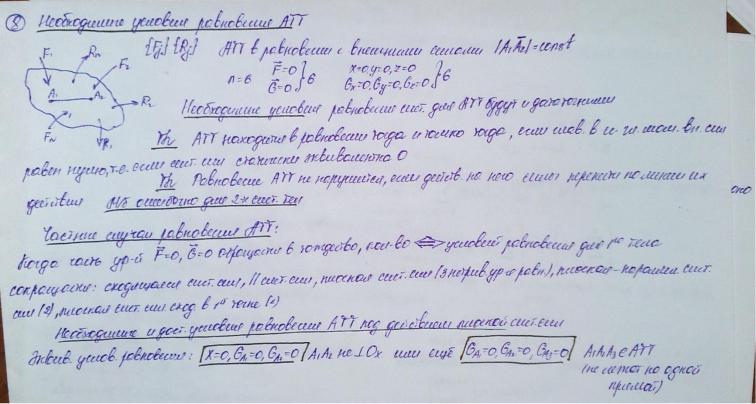
8. Необходимые условия равновесия абсолютно твёрдого тела.
(они же и достат.). n = 6. Эти условия F = 0, G = 0. Абс. тв. тело нах. в равн. тогда и только тогда, когда главн. вектор и главн. момент всех внешн. активн. и реакт. сил = 0. Т. равновес. АТТ не наруш, если действ. на него силы перенести по линии их действия (скользящ. векторы), но это утв. может быть ошибочно при кол-ве тел в сист. 1.Частные случаи: сист. сход. сил (в одну точку): G = 0 (всегда), условие: F = 0. Парралельн. сист. сил. Fj || OZ. Тогда условия: Fx = 0, Gx = 0, Gy = 0.
Плоская сист. сил: Fj OХY. Тогда условия Fy = 0, Fz = 0, Gx = 0. Модификац.: плоская сист. сил, сход. в 1-ой точке: условия: Fy = 0, Fz = 0. плоская || сист. сил: условия: Fy = 0, Gx = 0. Система из N
АТТ: n = 6N – s в R3, и 3N – s в R2. Классификац. сист. АТТ. Системы с n 1 наз. геометрич. изменяемыми или механизмами. Сист. с n = 0 наз. конструкциями или структурами. Сист., реакц. внеш. и внутр. связей в котор. можно найти, используя лишь ур-ия статики, наз. статически определимыми. Обобщенная система коорд. отлич. от ДСК тем, что ДК явл. независ, а ОК связаны с учетом связей (???). ОК не обяз. иметь четкий геометрич. смысл.
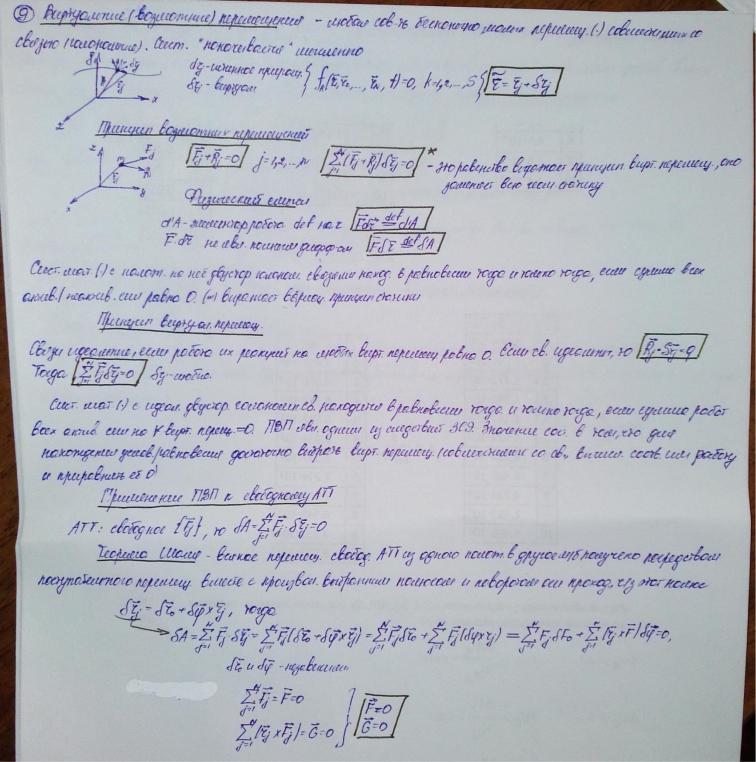
9. Понятие о виртуальных перемещениях. Формулировка принципа виртуальных перемещений. Принцип виртуальных перемещений для систем с идеальными связями.
Вирт. или возможными перемещ. наз. любая совокупность малых перемещ. точек… При этом не треб. удовл. ур-ям движ. rj ~ = rj + rj . fk(r1 , r2 , …, rN ; t) = 0, k = 1, 2, …, s. (1), fk(r1 ~, r2 ~, …, rN ~; t) = 0, k = 1, 2, …, s. (2). Движ. rj отлич. от действ. малых движ. drj , котор. удовл. ур-ию и (1), и (2). rj - только (2). Принцип вирт. перемещ.: будем рассм. сист. со стационарн. связями, а
также предполагаем, что активн. силы явно от времени не зависят. j=1N(Fj + Rj ) rj = 0, j = 1, 2, …, N (3). Равнство (3) выражает ПВП. Это рав-во заменяет всю геометтрич. статику. Известоно, что
F dr = d'A (d'A – действит. элементарная работа (не явл. полным дифф.), по аналогии F r = 'A
– вирт. работа силы F на вирт. перемещ. r . Сист. с двухсторонними связями нах. в равновес. тогда и только тогда, когда вирт. работ всех активн. и реакт. сил на любых вирт перемещ. = 0. ПВП для сист. с идеальн. связями. Связь наз. идеальн., если работа реакции на любых ВП = 0. Rj rj =
0. j=1NFj rj = 0, j = 1, 2, …, N. (4). Важным св-вом сил реакции связей явл. то, что их полная работа при малом отклонении системы от полож. равн. =0. Применение ПВП к АТТ. Рассм. абс. тв.
свободное тело, на котор. действ. F1 , F2 , …, FN . Если сист. нах. в равн., то сист. удовл. ур-ию
j=1NFj rj = 0, j = 1, 2, …, N. Т. Шаля: Всякое перемещ. свободного АТТ из одного полож в другое может быть получено посредством поступательного и вращат. движений. rj = r0 + [ x rj ],
(5). rj - радиус-вектор j – ой точки, r0 - вектор поступат. перемещ., - вектор вращения отн.
какого либо полюса. Подставим (5) в (4). j=1N[rj x Fj ] = 0 G = 0. Отсюда след, что взятые в . слагаемые должны обращ. в 0, т. к. r0 и явл. независ. Замеч.: ПВП дает необх. и достат. усл. равновес. сил в каждой точке матер. сист. и в то же время необх. но недостат. усл. равн. для всей сист. целом. Для АТТ эти усл. будут и достат.
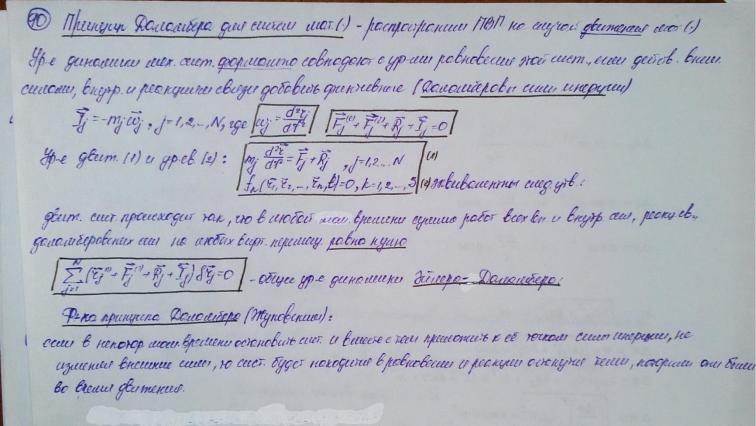
10. Принцип Даламбера для сист. матер. точек. Общее ур-е динамики Даламбера-Эйлера.
Распространим ПВП на случ. движения сист. Ур-ия динамики мех. сист. формально сосвадают с уравн. равновес. этой сист., если к действит. внеш. силам, внутр. силам и реакц. связей добавить фиктивные (Даламберовы) силы инерции. Fj = 0, j = 1, 2, …, N, Ij = - mj(d2r/dt2). Движ. сист. происх. так, что в любой момент t работ всех внеш. и внутр. сил, реакц. связей и даламберовых сил на любых виртуальн. перем. = 0. Итак, самое Общее ур-е динамики Даламбера-Эйлера: j=1N(Fj + Fj + Rj + + Ij ) rj = 0, j = 1, 2, …, N. Н. Е. Жуковский: "Если в некотор. момент. t остановить систему и вместе с тем приложить к ее точкам силы инерции не изменяя активные силы, то сист. будет находиться в равновесии и реакции связей останутся такими, какими они были во время движения".
11.Общие предположения о свойствах материалов. Внешние и внутренние силы. Метод сечений.Нас будет интересовать не отдельные частицы, поведение материала как целого. Реальное тело(вещ-во) заменяем некоторым идеальным (моделью). В дальнейшем – модель сплошной среды.
Применяемые гипотезы: 1)о сплошности 2)об однородности 3)об изотропности 4)о жесткости 5)о линейности Внешние силы. Классификация Наиболее существенные признаки:1)-место расположения точек приложения сил
2)по характеру изменения сил в процессе их приложения.
Внутренние силы. Метод сечений В общей механике была введена аксиома связи. В механике деформирующегося тела введем понятие внутренних связей, т.е. связей, обеспечивающих целостность тела.
Прием, позволяющий перенести внутренние силы в разряд внешних, называется методом сечений. Выберем некоторый центр
приведения(полюс). Обычно выбирается центр тяжести поперечного сечения. Эти силы можно привести к главному вектору и моменту. ̅=0; ̅=0 ∑x=0;∑y=0;∑z=0 momx=0;momy=0;momz=0
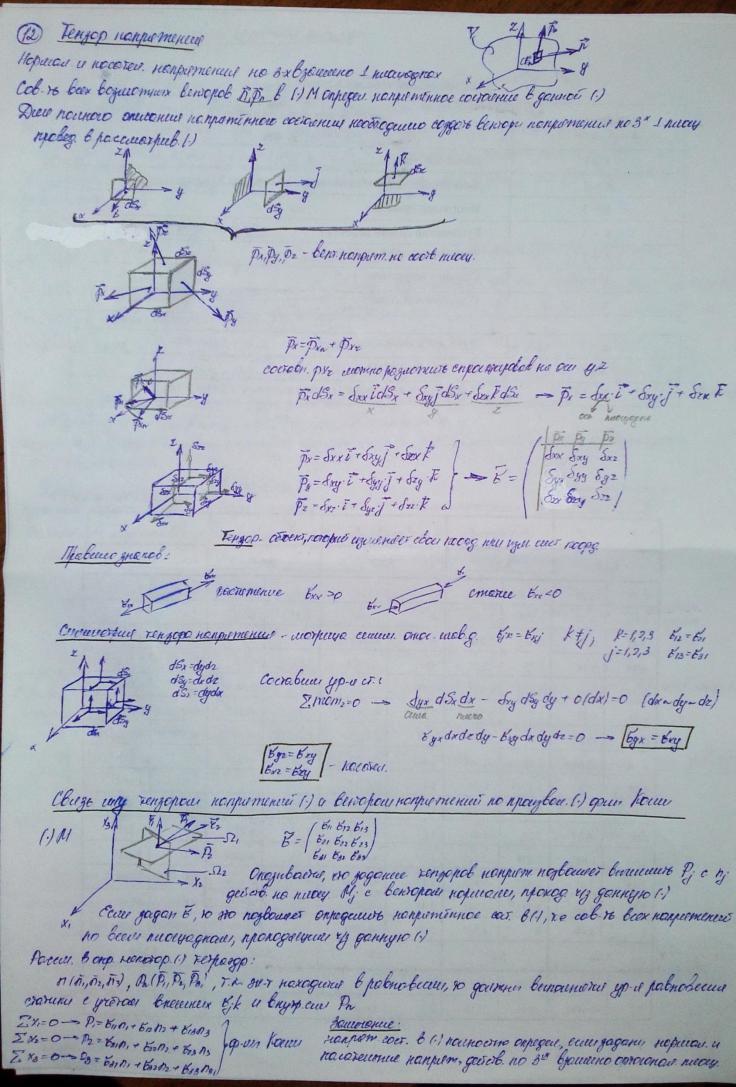
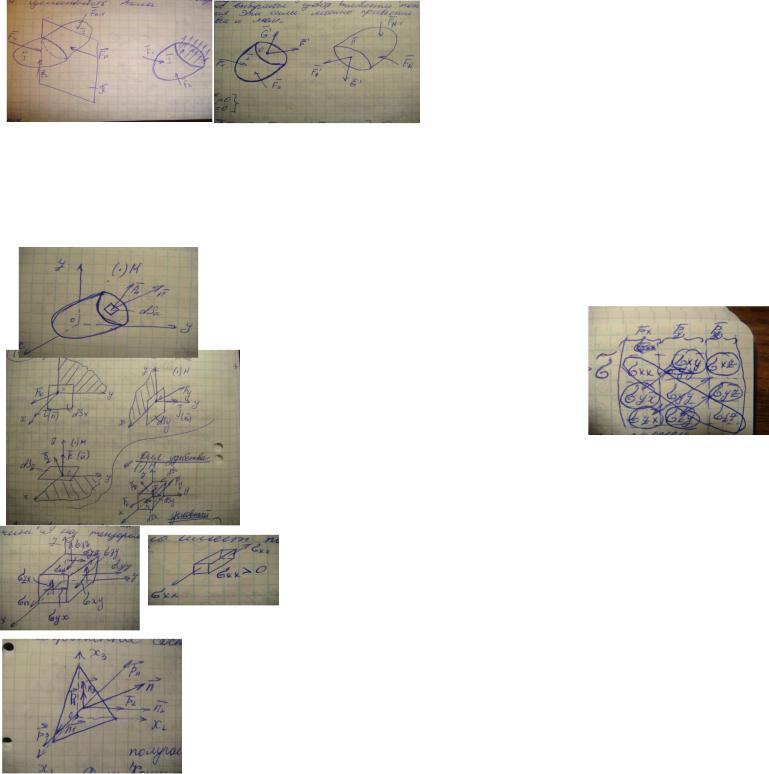
12.Тензор напряжений. Симметрия тензора напряжений. Связь между тензором напряжений и вектором напряжений по произвольной площадке, проведенной через
данную точку.Нормальные и касательные напряжения на взаимно ортогональных площадках.Казалось бы, что для полной характеристики напряженного состояния ̅1= ̅n1; ̅2= ̅n2; ̅k= ̅nk
Представим вектор ̅x в виде разложения:
̅x=σxx +̅σxy +̅σzx ̅ ̅y=σxy +̅σyy +̅σzy ̅ =>
̅z=σxz +̅σyz +̅σzz ̅
Эта матрица соответствует некоторой тензорной величине и называется тензором в данной точке.σxx;σyy;σzz – нормальные
напряжения. Остальные - касательные напряжения, они равны. Первый индекс – ось действия, второй – направление нормали к площадке, по кот. действуют эти напряжения. Четкий механический смысл приведенное правило имеет только для растяжения/ сжатия. Компоненты тензора напр.
На площадке с отрицательной внешней нормалью считаются положительными, если они направлены в сторону,
противоположную соотв. оси. Симметрия тензора напряжения
(Закон парности).Тензор напряжения является симметричным: σjk = σkj. Для доказательства закона парности необходимо составить
уравнения равновесия статики для элемента с действующими на него напряжениями на площадках с положит. и отриц. нормалями. F=σS.Связь: Через произвольную точку сплошной среды можно провести множество площадок, по которым действуют различные напряжения Pj. Задание тензора напряжений в данной точке позволяет вычислить вектор напряжения Pj , действующий по любой площадке с нормалью ̅j , проходящей через данную точку. Если задан ̃, то можно определить напряженное состояние точки. Составляя уравнения статики для выделенного,
получаем ̅1=σ11n1+σ12n2+σ13n3 |
̅2=σ21n1+σ22n2+σ23n3 ̅3=σ31n1+σ32n2+σ33n3 - |
Формулы Коши ̅j=σjknk ; ̅j=∑ |
Формулы Коши выражают напряженное |
состояние в точке полностью определенно, если заданы нормальные и касательные напряжения (тензор) по трем взаимно перпенд. площадкам, проведенным через эту точку.Нормальные напряжения, действующие на каждую площадку.Вектор ̅nn нормального напряжения, действующего по наклонной площадке определим как сумму проекций векторов p1,p2 и p3 на направление нормали ̅.pnn=p1n1+p2n2+p3n3 подставим в эту формулу формулы Коши и учтем, что σjk=σkj тогда: ̅nn=σ11n12+σ22n22+σ33n33+2σ12n1n2+2σ13n1n3+2σ23n2n3
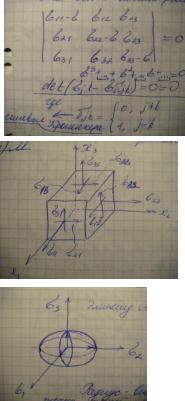
Гл напряжение и главные площадки.Для определения макс и мин значения напряжения pnn применим метод неопределенных множителей Лагранжа. Задача отыскания относительного экстремума.n12+n22+n32=1 , используя необходимое условие экстремума( равенство нулю частных производных) получаем систему
однородных уравнений:(σ11-σ)n1+σ12n2+σ13n3=0 σ21n1+(σ22-σ)n2+σ23n3=0 σ31n3+σ32n2+(σ33-σ)n3=0 эта сист. имеет решение, ежели определитель равен 0.
Получаем кубическое относительно σ уравнение, которое подчиняется след.правилу присвоения индексов: σ1 σ2
σ2 σ3 Площадки, по которым действуют
σ3 Площадки, по которым действуют
эти напряжения, назыв. главными. На них касательные напряжения = 0. Механ. истолкование главных напряжений.В каждой точке сплошной среды существуют 3 взаимно перпенд. площадки, по которым действуют только нормальные напряж.. Напряж. состояние в окрестности любой точ. можно представить как растяжения в 3 взаимно перпенд. направлениях, совпадающих с направлен. нормалей к главным площадкам.Элипсоид Ламе Радиус-вектор произвольной точ. такой пов-сти представл.полное напряжение на одной из площадок, положение кот. определ. Велич. М1,М2,М3. При этом одно из гл. напряж. явл. макс, другое мин. Инварианты
тензора. Разложение тензора . на сфер. тензор и девиатор. Гл. напряж., как и все напряж. состояния в данной точ. зависят от нагрузок и не зависят от выбора корд. осей =>и при других исходных напряжениях получаем одно и тоже кубическое уравнение => коэф-ты и свободные члены ур-ия инвариантны к преобразованию координат и называются инвариантами тензора напряжений в этой точке.I1=σ11+σ22+σ33 I’1=σ1+σ2+σ3
СМ ФОТО