

5. Построение искусственной реостатной механической характеристики двигателя, обеспечивающей в режиме противовключения при спуске груза скорость вращения, равную 0,2.
Для двигателей с фазным ротором при активном статическом моменте режим противовключения можно получить введением больших добавочных сопротивлений в ротор.
Искусственная
реостатная механическая характеристика
двигателя, обеспечивающая в режиме
противовключения при спуске груза
скорость вращению, равную 0,2 ,
должна
проходить через точку О и точку K
с координатами (
,
должна
проходить через точку О и точку K
с координатами (![]() ,
, )
рис. 5, где :
)
рис. 5, где :

соответствующее скольжение:

Точке
L
на естественной механической характеристики
соответствует угловая скорость вращения
 и скольжение рис. 5:
и скольжение рис. 5:

Определим сопротивление, обеспечивающее заданную скорость в режиме противовключения :


Рисунок 5. Искусственная механическая характеристика.
6. Определение скорости опускания груза в режиме генераторного торможения с рекуперацией энергии в сеть с добавочном сопротивлением, рассчитанным в п5. .
Реостатная
характеристика в режиме генераторного
торможения с рекуперацией энергии в
сеть (прямая )
с добавочным сопротивление, рассчитанным
в п.5 может быть легко получена из
реостатной механической характеристики
в двигательном режиме с этим сопротивлением
(прямая
)
с добавочным сопротивление, рассчитанным
в п.5 может быть легко получена из
реостатной механической характеристики
в двигательном режиме с этим сопротивлением
(прямая ),
путем ее отображения относительно
начала координат рис. 5.
),
путем ее отображения относительно
начала координат рис. 5.
Как
видно из рис. 5, при отображении относительно
начала координат наклон искусственной
характеристики остался низменным, она
лишь опустилась вниз на величину
 .
Следовательно, скорость опускания груза
в режиме генераторного торможения можно
определить согласно формуле:
.
Следовательно, скорость опускания груза
в режиме генераторного торможения можно
определить согласно формуле:

Определим линейную скорость груза при генераторном торможении с рекуперацией энергии:

7. Определение сопротивления и построение механической характеристики динамического торможения.
Динамическое торможение АД осуществляется путем отключения обмотки статора от питающей сети переменного 3-фазного тока и последующим включением ее в цепь постоянного тока. При таком питании обмоток статора асинхронный электродвигатель с ротором, вращающимся с переменной скоростью, представляет собой синхронный генератор с неявно
выраженными полюсами, работающий при переменной частоте. Его нагрузкой является сопротивление цепи ротора.
Однако с целью упрощения расчета характеристик динамического торможения АД и анализа его режима в практике электропривода принято заменять реальный режим синхронного генератора на своеобразный эквивалентный режим асинхронной машины. В этом случае расчет характеристик динамического торможения производится в следующем порядке:
Предварительно задаемся максимальным моментом и соответствующим ему критическим скольжением, по условию задачи принимаем:

где
 - номинальная мощность двигателя,
- номинальная мощность двигателя, -
номинальная частота вращения.
-
номинальная частота вращения.
И критическое скольжение:

где
 - установившаяся скорость подъема
определенная в п.3.
- установившаяся скорость подъема
определенная в п.3.
В первом приближении задаемся индуктивным сопротивлением цепи намагничивания:

где
 -
номинальное значение фазной ЭДС статора.
-
номинальное значение фазной ЭДС статора.
Находим величину фазного эквивалентного тока:

Определяем величину суммарного активного сопротивления роторной цепи, приведенного к обмотке статора:

Определим добавочное сопротивление цепи ротора:

Далее задаваясь скольжением, определяют момент и токи по формулам:
Электромеханический момент:
 (36)
Приведенный ток
ротора:
(36)
Приведенный ток
ротора:
 (37)
(37)
Ток намагничивания:
 (38)
(38)
Во всех выражениях используется скольжение:
 (39)
(39)
Угловая скорость вращения, выраженная через скольжение:
 (40)
(40)
Для
построения механической и скоростных
характеристик задаемся скольжениями
в диапазоне от 0 до 1,5, определяем
соответствующую угловую скорость
вращения двигателя по выражению (40) и
соответствующие значения моментов и
токов по формулам (36)-(38). Результаты
расчетов сведены в таблицу 2, подробный
расчет представлен для скольжения
 :
:
Таблица 2
|
|
0 |
0,2 |
0,5 |
0,8 |
0,975 |
1,2 |
1,4 |
1,5 |
|
|
0 |
20,94 |
52,35 |
83,76 |
102,08 |
125,64 |
146,58 |
157,05 |
|
|
0 |
-79,98 |
-164,98 |
-199,25 |
-203,16 |
-198,86 |
-190,55 |
-185,67 |
|
|
0 |
7,56 |
11,95 |
15,12 |
16,69 |
18,51 |
20 |
20,7 |
|
|
∞ |
40,34 |
25,53 |
20,22 |
18,33 |
16,55 |
15,36 |
14,84 |





Электромагнитный момент на валу:

Приведенный ток ротора:

Ток намагничивания:

Построенные по результатам расчетов механическая и скоростные характеристики динамического торможения представлены на рис. 6, рис. 7, и рис. 8.
Далее
необходимо провести уточняющий расчет
характеристик динамического торможения
при
 по
найденным значениям
по
найденным значениям и
и в
следующей последовательности:
в
следующей последовательности:
Задаемся током намагничивания и находим его относительное значение:

По
характеристике намагничивания определяем
соответствующее значение ЭДС фазной
обмотки статора в относительных единицах
 ,
обобщенная характеристика намагничивания
в относительных единицах, которую можно
использовать для двигателей серии 4МТН
и 4МТF(Н)
приведена. Затем определяем истинное
значение ЭДС обмотки статора:
,
обобщенная характеристика намагничивания
в относительных единицах, которую можно
использовать для двигателей серии 4МТН
и 4МТF(Н)
приведена. Затем определяем истинное
значение ЭДС обмотки статора:

где
 -
номинальное значение фазной ЭДС статора.
-
номинальное значение фазной ЭДС статора.
Определяем значение индуктивное сопротивление цепи намагничивания:

Далее находят значение величин:
Определяется скольжение по формуле:

Рассчитывается приведенный ток ротора:

Определяется электромагнитный момент:

Для
построения динамических характеристик
задаемся токами намагничивания в
диапазоне от 0 до
 и
определяем моменты, приведенные токи
ротора, скольжения и соответствующие
им угловые скорости вращения двигателя
по выражению (40). Результаты расчетов
сведены в таблицу 3, подробный расчет
представлен для тока намагничивания
и
определяем моменты, приведенные токи
ротора, скольжения и соответствующие
им угловые скорости вращения двигателя
по выражению (40). Результаты расчетов
сведены в таблицу 3, подробный расчет
представлен для тока намагничивания
Таблица 3
|
|
3 |
6 |
9 |
11 |
14 |
16 |
18 |
20 |
22 |
25,83 |
|
|
92,93 |
165,21 |
208,58 |
229,23 |
238,92 |
245,75 |
251,94 |
259,17 |
264,33 |
268,46 |
|
|
30,98 |
27,54 |
23,18 |
20,84 |
17,07 |
15,36 |
14 |
12,96 |
12,02 |
10,39 |
|
|
7,79 |
3,69 |
2,72 |
2,35 |
2,04 |
1,83 |
1,61 |
1,36 |
1,09 |
0 |
|
|
815,61 |
386,34 |
284,78 |
246,05 |
213,59 |
191,6 |
168,57 |
142,39 |
114,12 |
0 |
|
|
24 |
23,33 |
22,2 |
21,24 |
19,36 |
17,88 |
16,16 |
14,12 |
11,58 |
0 |
|
|
52,61 |
105 |
129 |
136,56 |
130,42 |
124,27 |
115,51 |
104,14 |
87,34 |
0 |







Относительное значение тока намагничивания:

По характеристике намагничивания определяем соответствующее значение ЭДС фазной обмотки статора в относительных единицах:

Истинное значение ЭДС обмотки статора:

Значение индуктивное сопротивление цепи намагничивания:

Скольжение:

Приведенный ток ротора:

Определяется электромеханический момент:


Построенные по результатам расчетов механическая и скоростные характеристики представлены на рис 6 рис 7, и рис 8.
Сравнивая
динамические характеристики, построенные
при условии
 и
и ,
значительно отличаются. Как видно в
режиме динамического торможения
электродвигатель не обеспечивает
заданный тормозной момент при начальной
скорости торможения, равной установившейся
скорости подъема. Для обеспечения
высокого тормозного момента необходимо
уменьшить добавочное сопротивление
цепи ротора и поднять ток в статоре.
,
значительно отличаются. Как видно в
режиме динамического торможения
электродвигатель не обеспечивает
заданный тормозной момент при начальной
скорости торможения, равной установившейся
скорости подъема. Для обеспечения
высокого тормозного момента необходимо
уменьшить добавочное сопротивление
цепи ротора и поднять ток в статоре.
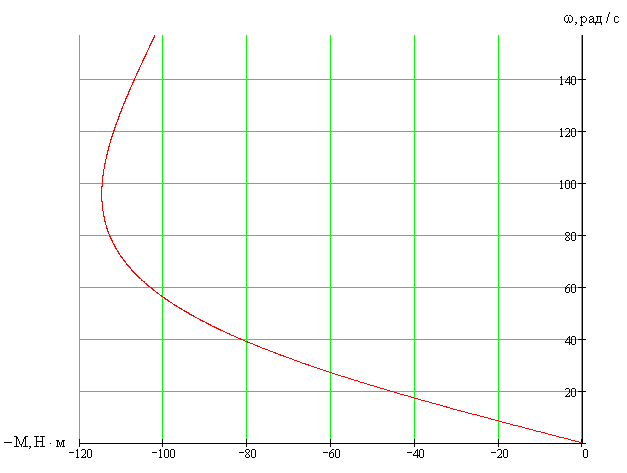
Рисунок 6. Механическая характеристика динамического торможения.
ЗАДАЧА №2.
Рассчитать и
построить графики механических переходных
процессов электропривода грузоподъемной лебедки
в следующих режимах.
электропривода грузоподъемной лебедки
в следующих режимах.