

Министерство образования и науки РФ
Федеральное Государственное бюджетное образовательное
учреждение высшего профессионального образования
Новосибирский государственный технический университет
Кафедра электропривода и автоматизации промышленных установок
Расчетно-графическая работа
по дисциплине
"Электрический привод"
Вариант 52
Выполнил: Абрамов А.В.
Группа: ЭМ – 03.
Проверил: Абакумов И.Д.
Новосибирск
2013г.
Задача № 1
1.
Привести моменты инерции движущихся
инерционных масс привода к скорости
вращения электродвигателя. Определить
суммарный момент инерции расчетной
эквивалентной механической схемы
привода. При этом принять суммарный
момент инерции соединительных муфт и
шестерни редуктора, вращающихся со
скоростью двигателя
 ,
равным
,
равным ,
а суммарный момент инерции соединительных
муфт и шестерни редуктора, вращающихся
со скоростью механизма
,
а суммарный момент инерции соединительных
муфт и шестерни редуктора, вращающихся
со скоростью механизма ,
равным
,
равным .
.
2.Определить приведенные к скорости вращения электродвигателя моменты статического сопротивления для двух режимов работы электродвигателя:
а) двигательный режим – при подъеме груза,
б) генераторный (тормозной) режим – при спуске груза.
При
этом КПД механизма принять равным
 ,
а КПД редуктора
,
а КПД редуктора .
.
3.Построить естественные скоростную и механическую характеристики электродвигателя. Указать на них величину установившихся скоростей вращения двигателя при подъеме и спуске груза. Определить соответствующие линейные скорости подъема и опускания груза.
4. Построить пусковую диаграмму электродвигателя при питании его от сети с неизменным напряжением, равным номинальному. Определить величину сопротивлений пусковых ступеней, число их n берется из табл. № 2, 3.
5.Определить
сопротивление и построить искусственную
реостатную механическую характеристику
электродвигателя, обеспечивающую в
режиме противовключения при спуске
груза скорость вращения, равную
 .
.
6.Определить скорость опускания груза, если электродвигатель будет работать на реостатной характеристике в режиме генераторного торможения с рекуперацией энергии в сеть с добавочным сопротивлением, рассчитанным в п.5.
7.
Определить сопротивление и построить
механическую характеристику динамического
торможения, обеспечивающую при начальной
скорости торможения, равной установившейся
скорости подъема (см. п. 3), начальный
тормозной момент, равный
 .
.
Для асинхронного электродвигателя значение заданного начального момента приравнивается величине критического момента при динамическом торможении, а соответствующее ему критическое скольжение определяется заданной начальной скоростью торможения.
Исходные данные.
Технические
данные двигателя:
Тип
двигателя:4MTF(H)132L6
|
Номинальная мощность двигателя |
|
5500 |
Bт |
|
Номинальная частота вращения двигателя |
|
915 |
Об/мин |
|
Максимальная скорость вращения двигателя |
|
2500 |
Об/мин |
|
Максимальный момент двигателя |
|
135 |
|
|
Момент инерции двигателя |
|
0,09 |
|
|
Номинальный ток статора |
|
14,8 |
А |
|
Коэффициент мощности |
|
0.74 |
|
|
Ток холостого хода |
|
8.96 |
A |
|
Коэффициент мощности при холостом ходе |
|
0.13 |
|
|
Активное сопротивление статора |
|
1.07 |
Ом |
|
Реактивное сопротивление статора |
|
1,3 |
Ом |
|
Номинальная ЭДС ротора |
|
213 |
В |
|
Номинальный ток ротора |
|
18,3 |
Ом |
|
Активное сопротивление ротора |
|
0,306 |
Ом |
|
Реактивное сопротивление ротора |
|
2,2 |
Ом |
|
Коэффициент трансформации |
|
2,82 |
|
|
Число ступеней пуска |
|
5 |
|



















Технические
данные механизма подъема:
|
Диаметр барабана |
|
0,2 |
м |
|
Масса груза |
|
1200 |
кг |
|
Передаточное число редуктора |
|
27 |
|
|
Момент инерции барабана |
|
60 |
|
|
Высота подъёма груза |
|
20 |
м |






Кинематическая схема:
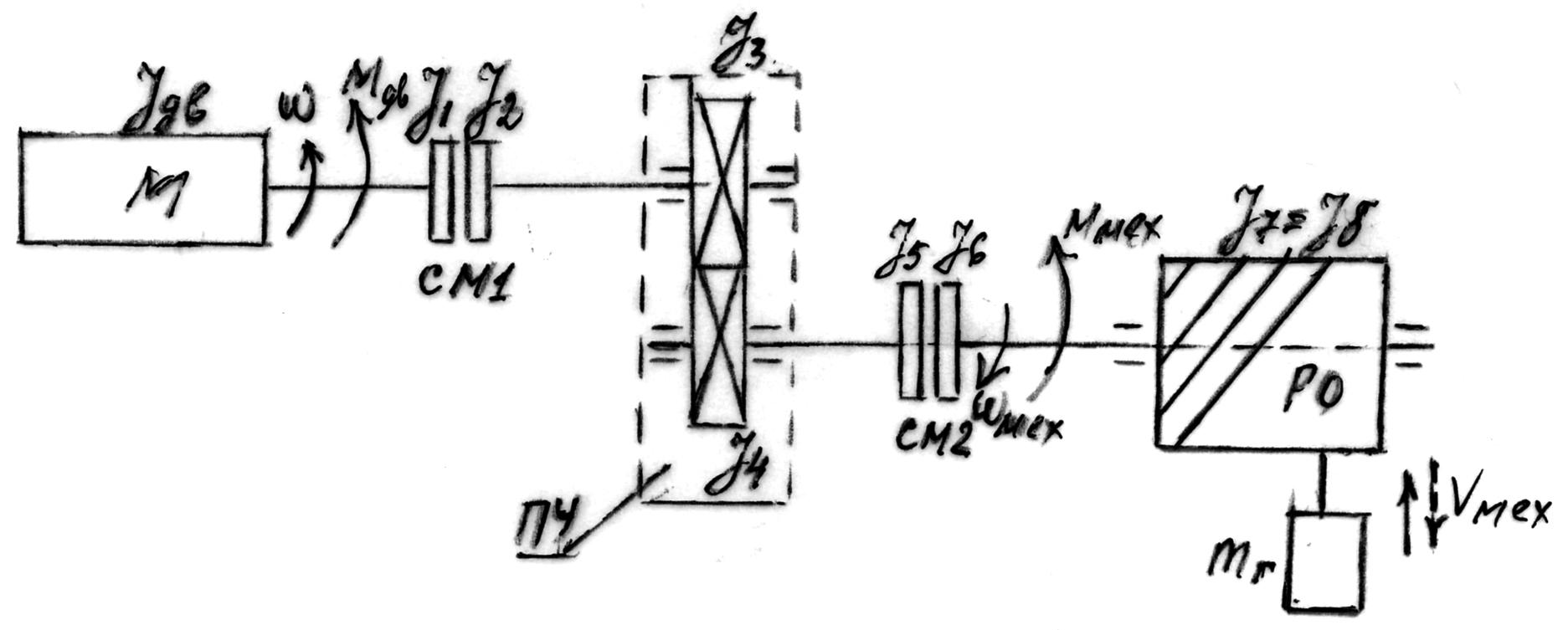
Рисунок 1. Электропривод грузоподъёмной лебёдки.
СМ1,
СМ2 – соединительные муфты, ПУ –
передаточное устройство (редуктор), РО
– рабочий орган (барабан) механизма,
 - масса груза.
- масса груза.