

2.4 Расчет гидроусилителя, определение производительности и необходимой мощности на привод насоса гидроусилителя
Расчет гидроусилителя рулевого управления начинается с определения момента сопротивления повороту управляемых колес Мс на сухом асфальте при полностью нагруженном автомобиле и сводится к последующему определению: размеров исполнительного цилиндра, распределителя, диаметра трубопроводов, производительности гидронасоса и мощности, затрачиваемой на его привод.
Рабочий объем силового цилиндра определяется исходя из работы Ау, совершаемой
усилителем.
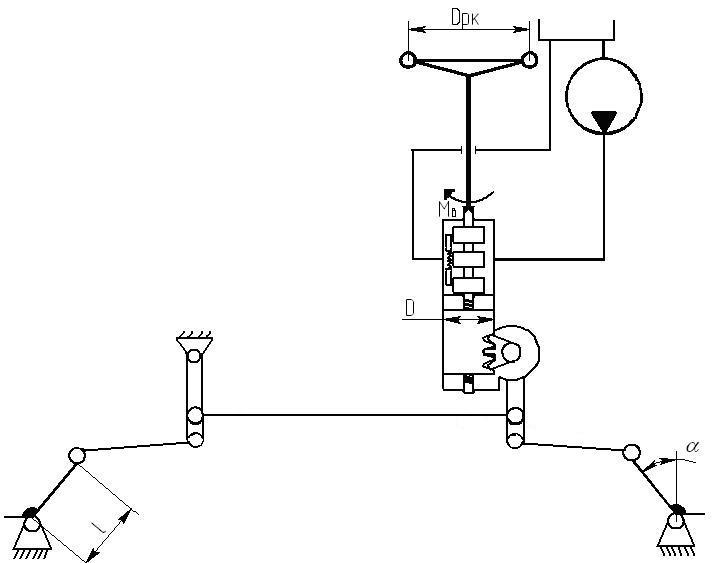
Рисунок 2.5. Расчетная схема гидроусилителя.
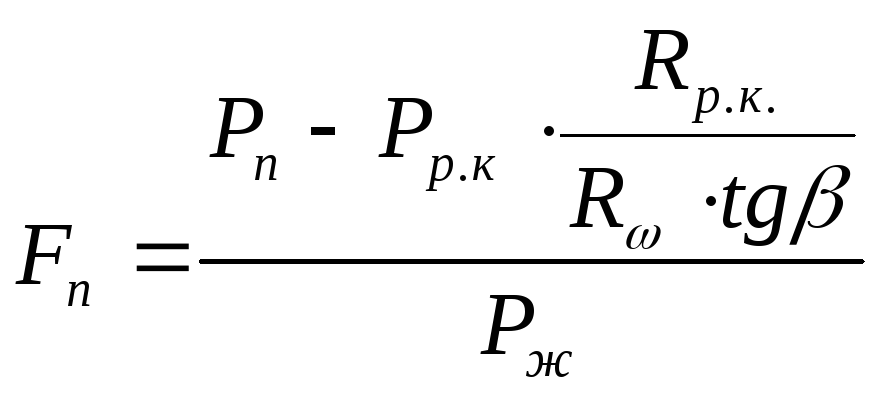
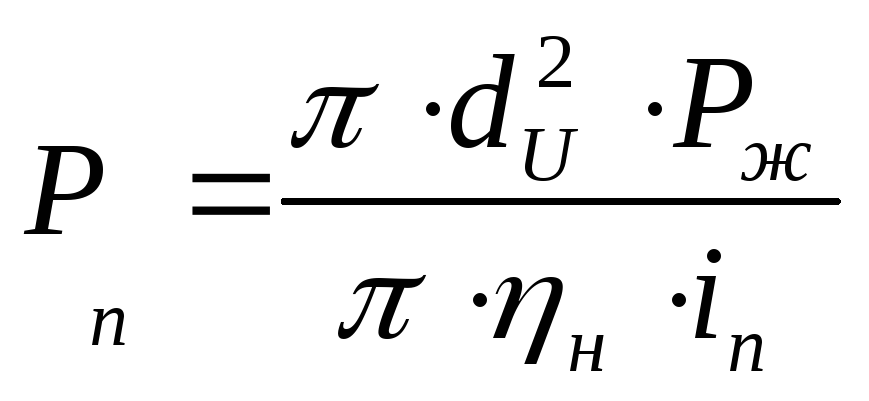
Определим усилие сопротивления на поршне:
![]() (2.21)
(2.21)
Где:![]() -
момент на валу сошки:
-
момент на валу сошки:![]() ;
(2.22)
;
(2.22)
![]() -момент
сопротивления на колесе.
-момент
сопротивления на колесе.
![]() -радиус
сектора.
-радиус
сектора.
![]() - КПД рулевого привода.
- КПД рулевого привода.
![]()
![]()
Рабочая площадь поршня определяется по формуле:
 (2.23)
(2.23)
![]() -
принимаем минимальное усилие, требуемое
на рулевом колесе 15 Н
-
принимаем минимальное усилие, требуемое
на рулевом колесе 15 Н
![]() =
=![]() -
угол наклона винтовой линии.
-
угол наклона винтовой линии.
![]() мм-
радиус винта.
мм-
радиус винта.

Диаметр цилиндра определяем исходя из того, что поршень выполнен заодно с гайкой и его перемешение происходит по винту. Используем формулу:
![]() ,
(2.24)
,
(2.24)
Где,
![]() - площадь сечения винта.
- площадь сечения винта.
![]()
![]()
Принимаем
![]() ; тогда площадь поршняFП=5,94
см2
; тогда площадь поршняFП=5,94
см2
Так как усилитель интегрированный, то объем цилиндра определяется по формуле:
![]() ,
(2.25)
,
(2.25)
где
![]() - ход поршня, равный ходу гайки по винту;
- ход поршня, равный ходу гайки по винту;
![]()
Номинальная производительность насоса определяется по формуле:
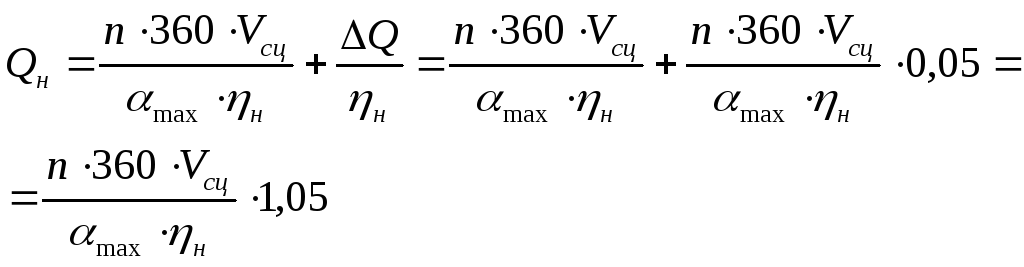 (2.26)
(2.26)
где![]() максимальная скорость поворота рулевого
колеса,об/с;
максимальная скорость поворота рулевого
колеса,об/с;
αmax= 64·16,4 = 1049,6 град - угол поворота рулевого колеса из одного крайнего положения в другое;
![]() объемный КПД насоса;
объемный КПД насоса;
ΔQ= 0,05Qmax- утечки, при давленииРравном 0,5Рmax.
![]()
Мощность, затрачиваемая на привод насоса, определяется по формуле:
![]() (2.27)
(2.27)
![]()
где
![]() Па
- расчетное давление жидкости
Па
- расчетное давление жидкости
Диаметр трубопроводов:
![]() (2.28)
(2.28)
где v –скорость движения жидкости в трубопроводах:
нагнетательная магистраль:
![]() ;
;
сливная магистраль:
![]() ;
;
всасывающая магистраль:
![]() .
.
Получим:
нагнетательная магистраль:
![]() ;
;
сливная магистраль:
![]() ;
;
всасывающая магистраль:
![]()
3. Тормозное управление
Тормозное управление автомобиля - это совокупность устройств, предназначенных для создания и изменения искусственного сопротивления движению АТС, с целью управления скоростью движения, в том числе и удержания АТС неподвижным относительно дороги во время стоянки.
Торможения разделяются на рабочие, аварийные, стояночные, а по интенсивности - на служебные и экстренные.
3.1 Определение усилия на педали тормоза (экстренное торможение φ=0,7)
Усилие на тормозной педали определяется по формуле:
 (3.1)
(3.1)
где ηн
– КПД привода, принимаем
![]() ;
;
iп = 3,5 – передаточное число педального привода;
iп =a/b ( рис. 3.1)
![]() =19
мм
- диаметр главного цилиндра;
=19
мм
- диаметр главного цилиндра;
![]() - давление в
тормозной системе;
- давление в
тормозной системе;
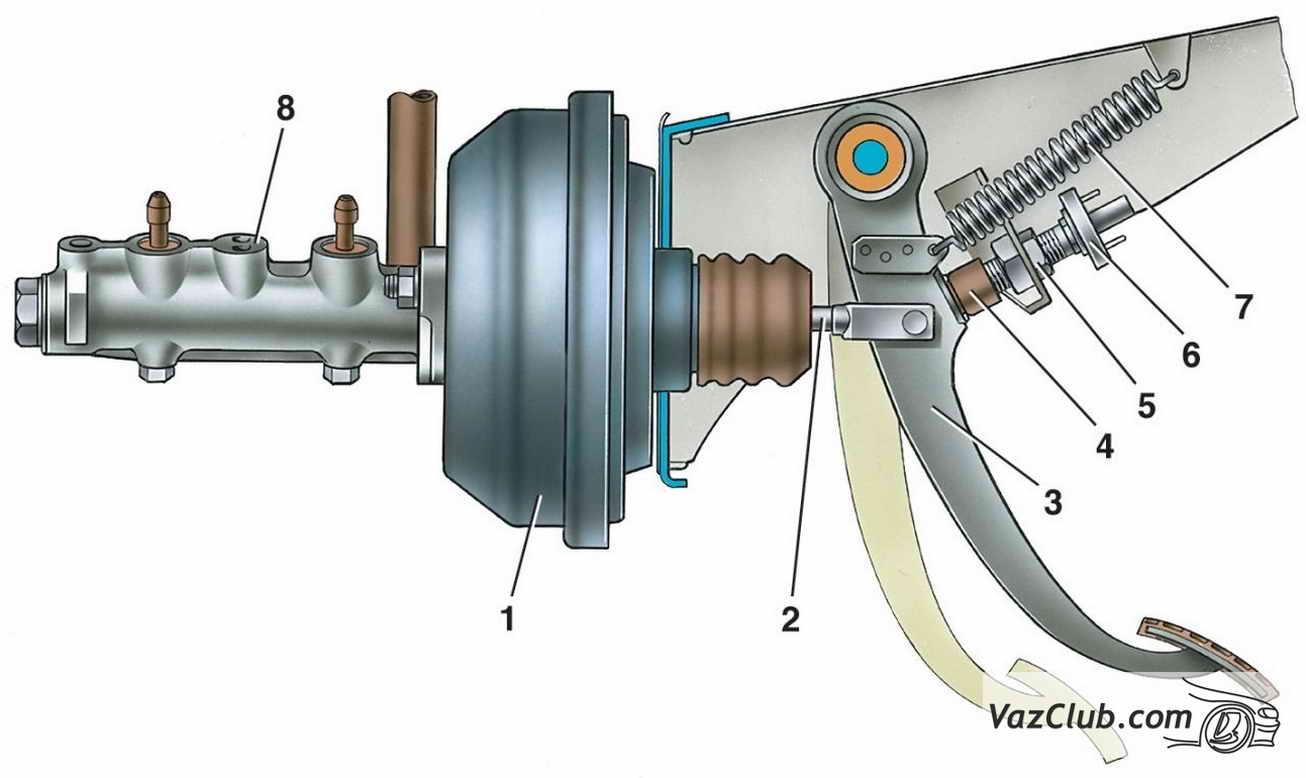
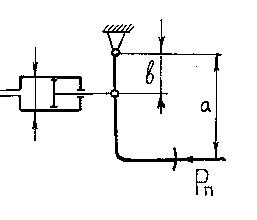
Рис. 3.1 педальный привод
 ,
(3.2)
,
(3.2)
где
![]() -
радиус рабочего цилиндра.
-
радиус рабочего цилиндра.
Момент в тормозном механизме Mт по абсолютной величине равен тормозному моменту на колесе Mt, который, в свою очередь, определяется следующим образом:
 (3.3)
(3.3)
где: Mt1,2- тормозной момент соответственно на передней и задней осях; Rz1,2- нормальные реакции дороги, действующие соответственно на передней и задней осях;
j - коэффициент сцепления.
Величины нормальных реакций при торможении определяются из выражений:
 (3.4)
(3.4)
где ma - масса автомобиля; aн - замедление автомобиля;
a,b,hg - координаты центра массы автомобиля;
L - база автомобиля.
Таким образом, получаем:
![]() H;
H;
![]() Н;
Н;
![]() Н•м;
Н•м;
![]() Н•м.
Н•м.
Для передних дисковых тормозных механизмов (рис.3.1,а) тормозной момент Мт определяется зависимостью:
![]() (3.5)
(3.5)
где: m- коэффициент трения (расчетный m=0,35);
rср - средний радиус приложения силы Р к накладке (rср = 0,1025 м).
Приводная сила на передних тормозных механизмах определяется из выражения:
![]() ,
(3.6)
,
(3.6)
откуда:
 (3.7)
(3.7)
![]() Н
Н
Для задних барабанных механизмов с односторонним расположением опор и равными приводными силами P1=P2 (рис.3.1,б).
![]() .
(3.8)
.
(3.8)
где ![]() – приводная сила на задней оси;
– приводная сила на задней оси;
rб – радиус барабана, м;
μ – коэффициент трения;
h – расстояние от рабочего цилиндра до опоры, м;
a – расстояние от опоры до линии действия реакции, м;
![]() -
коэффициент касательных сил;
-
коэффициент касательных сил;
 ,
(3.9)
,
(3.9)
где β – угол обхвата колодки, рад.
![]()
Приводная сила на задних тормозных механизмах определяется из выражения:
![]() ,
(3.10)
,
(3.10)
откуда  .
(3.11)
.
(3.11)
Таким образом, получаем
 Н
Н
![]() Н
Н
Давление в тормозной системе передних и задних тормозных механизмов соответственно:
![]() (3.12)
(3.12)
где
![]() сила на тормозном механизме;
сила на тормозном механизме;
![]() площадь поршня,
м.
площадь поршня,
м.
![]() МПа, (3.13)
МПа, (3.13)
Давление
в тормозной системе передних тормозных
механизмов больше чем в задних тормозных
механизмов, следовательно принимаем
![]()
Усилие на педали тормоза составит:
![]() Н
Н
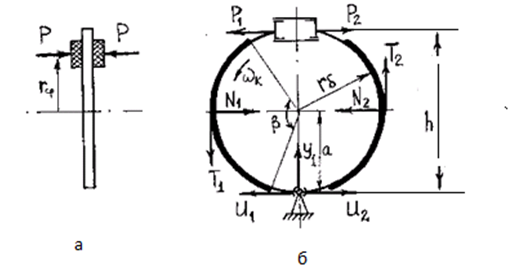
Рис. 3.2.