

РАДИОЭЛЕКТРОННАЯ БОРЬБА: РАДИОРАЗВЕДКА И РАДИОПРОТИВОДЕЙСТВИЕ
.pdfамплитудной модуляции сигнала, если ее рассматривать как медленные изменения амплитуды входного сигнала, не оказывает существенного влияния на изменение выходного соотношения сигнал/шум. Иначе говоря, и в этом случае соотношение (4.16) можно рассматривать как оценочное для соотношения сигнал/шум на выходе амплитудного детектора, используемого для демодуляции колебания с линейной модуляции. Разумеется, для таких оценок в (4.16) следует учитывать мощность только сигнальных зависящих от сообщения составляющих сигнала. С учетом сказанного, а также того, что суммарная мощность информационных составляющих в соответствии с (4.11) m2Po, соотношение (4.16) можно преобразовать к виду
qвых = |
qвх2 |
(4.17) |
|
|
|
|
|
|
|
(1+ 2qвхm2 ) |
|
|
|
|
|
|
|||
Диаграмма обмена между мощностью входного сигнала и коэффициентом глубины модуляции, |
|||||||||
аналогичная рис.4.4 для оптимального демодулятора, приведена на |
рис.4.5. Для сравнения обе |
||||||||
|
|
диаграммы |
изображены |
на |
одном |
||||
|
|
рис.4.6. Заштрихованная на рис.4.6 |
|||||||
|
|
область |
содержит |
все |
|
возможные |
|||
|
|
диаграммы |
для |
любых |
практически |
||||
|
|
применимых приемников. |
|
|
|||||
|
|
|
Нижняя граница этой области |
||||||
|
|
соответствует |
оптимальному |
де- |
|||||
|
|
модулятору |
сигнала |
с |
линейной |
||||
|
|
модуляцией, а верхняя - квадратично- |
|||||||
|
|
му детектору. |
|
|
|
|
|
||
|
|
|
Таким |
|
|
|
образом, |
||
|
|
заштрихованная |
на рис.4.6 |
полоса |
|||||
|
|
дает представление о |
разбросе оценок |
||||||
|
|
порогового соотношения сигнал/шум |
|||||||
|
|
при линейной модуляции, обусловлен- |
|||||||
|
|
ном различием моделей |
|
|
|
||||
|
|
процесса |
демодуляции. |
|
Любая |
||||
реальная схема демодулятора обеспечивает пороговое выходное соотношение сигнал/шум при q,x большем, чем нижняя граница заштрихованной на рис.4.6 области.
При линейных видах модуляции выходное соотношение сигнал/шум никогда не больше входного. Принципиально иное положение складывается при нелинейной модуляции.
При малых индексах ЧМ тчм<\ ширина спектра сигнала не превосходит двойной ширины спектра сообщения (узкополосная ЧМ) и соотношение сигнал/шум при демодуляции не увеличивается. Мощности информационных компонент в спектре ЧМ сигнала такая же, как и при AM. Поэтому при анализе пороговых свойств узкополосных ЧМ сигналов (тчм<l)
можно пользоваться теми же соотношениями и диаграммами рис.4.3, что и для AM.
При частотной модуляции с большим индексом тчм>1 демодулятор "собирает" энергию сигнала из входной полосы ∆f=2(fд+Fmax)=2fд(тчм+1) и сосредотачивает ее в полосе сообщения (0;Fmaх), тогда
как приложенный к сообщению шум формируется выходными флуктуациями сигнала в полосе сообщения. Таким образом происходит обмен входной полосы сигнала на выходное соотношение сигнал/шум. Принципиально увеличение соотношения сигнал/шум имеет порядок соотношения полос
тчм= ∆fд/Fmax (4.18)
Но обмен полосы на соотношение сигнал/шум происходит только при больших уровнях входного сигнала. При уменьшении входного соотношения сигнал/шум наступает пороговый эффект - резкое нелинейное уменьшение сигнала на выходе. Степень уменьшения выходного соотношения сигнал/шум зависит и от
уровня сигнала, и от величины индекса модуляции.
На качественном уровне этот эффект можно пояснить следующим образом.
Конец вектора сигнала с линейной модуляцией s(t) (рис.4.2) под управлением сообщения перемещается по прямолинейной траектории между точками Smin И Smах . Совершенно очевидно, что
Smах - Smin = 2 mama<=1, (4.19)
Поэтому информационная производная
ds(t) |
= mам ≤1 |
(4.20) |
|
dx(t) |
|||
|
|
т. е. приращение сообщения dx(t) не больше вызываемого им приращения сигнала
|ds(t)|=<dx(t)|. (4.21)
Значит, если к сигналу прикладывается шум, искажающий его на некоторую величину δs, демодулированное сообщение х* будет искажаться на δx*<=δs не больше, чем на δs.
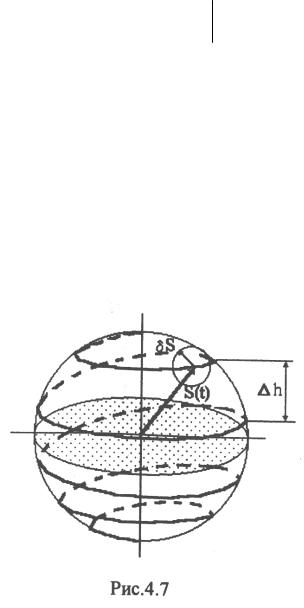
В случае нелинейной (фазовой или частотной) модуляции модуль вектора сигнала остается постоянным. Под воздействием модулирующего сообщения x(t) вектор сигнала изменяется. Условие постоянства модуля означает, что конец вектора s(t) в процессе модуляции должен скользить по поверхности постоянного радиуса - гиперсфере радиуса |s(t)| в пространстве сигналов. Разным точкам поверхности сферы соответствуют разные сигналы. Но не все сигналы формируются в процессе модуляции. Поскольку по линии передается непрерывное аналоговое сообщение x(t) (при передаче речи), близким значениям сообщения x(t) соответствуют мало отличающиеся значения сигнала s(t). Траектория конца вектора s(t) - непрерывная .кривая на поверхности гиперсферы. Для иллюстрации на рис.4.7 показана такая гиперсфера и линия модулированных сигналов на ее поверхности в трехмерном пространстве.
В отличие от линейной модуляции протяженность линии сигналов при ЧМ или ФМ может быть сделана сколь угодно большой без увеличения мощности (или энергии) сигналов. Однако при этом "витки" линии нужно укладывать на поверхности гиперсферы все плотнее и плотнее и расстояние ∆h между соседними витками ("шаг намотки") будет все меньше и меньше. Эта особенность приводит к существенному различию помехоустойчивости нелинейных видов модуляции по сравнению с линейными.
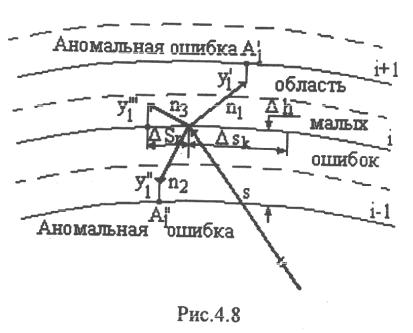
Для иллюстрации можно рассмотреть небольшой участок поверхности гиперсферы, на котором расположены три соседних "витка" линии сигнала с номерами (i-1), i и (i+1) (рис.4.8).
В некоторый момент времени t1 конец вектора сигнала s находился на линии сигнала в точке A1. При изменении непрерывного сообщения на величину ∆x (|∆x <<1[) сигнал изменится на
некоторую величину ∆Sx, a конец вектора сигнала переместится по линии сигналов из точки A1 в точку А2;. Связь между ∆x и ∆Sx устанавливается, если взять отношение
Ks = |
∆sx |
= |
s(t + ∆t) − s(t) |
≈ |
ds(t) |
(4.22) |
|
∆x |
s(t + ∆t) − x(t) |
dx(t) |
|||||
|
|
|
|
Представив (4.22) в форме
|
ds(t) dx(t) |
−1 |
s'(t) |
|
|||||||||||
Ks = |
|
|
|
|
= |
|
|
|
|
|
(4.23) |
||||
dt |
|
x'(t) |
|||||||||||||
|
|
dt |
|
|
|
|
|
|
|
|
|||||
можно получить оценку коэффициента Ks: |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Ks ≤ |
∆fc max |
|
s(t) |
|
|
|
|
|
(4.24) |
|||||
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
F |
|
max |
|
s(t) |
|
|
||||||||
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
||||||||||
|
|
max |
|
|
|
|
|
|
|
|
|
|
|
|
|
где ∆fc - ширина спектра модулированного сигнала; Fmax - верхняя граничная частота спектра сообщения.
Приняв во внимание, что max|x(t)|=l, а для ЧМ (или ФМ) max|s(t)|=a, можно получить следующее выражение для Ks:
Кs=a∆φ |
(4.25) |
Величина К, показывает, во сколько раз приращение сигнала ∆s больше соответствующего ему приращения сообщения ∆х, поэтому Ks можно назвать коэффициентом растяжения сигнала. Чем меньше этот коэффициент, тем протяженнее линия сигналов. Из выражения (4.25) следует, что при ЧМ или ФД можно увеличить длину линии сигналов за счет увеличения индекса модуляции ∆φ, не изменяя при этом мощность (или энергию) сигнала.
Если, кроме сигнала, на входе приемника действует также аддитивная флуктуационная помеха, то она будет "сбивать" конец вектора с линии сигналов. Пока помеха "мала", результирующий вектор s(t)+∆s с большой вероятностью попадает в окрестность точки А1 находящейся на рассматриваемом витке линии сигналов.
Влияние "малой" помехи можно оценить величиной дополнительного ("паразитного") смещения As точки Ai по линии сигналов. Полное смещение, определяемое как сообщением, так и помехой, окажется равным
∆s= ∆sx+ ∆sn= ∆sx (1+ ∆sn/ ∆sx) |
(4.26) |
Случайную величину ε=∆sn/ ∆sx - можно рассматривать как ошибку, вызванную помехой. Чтобы влияние помехи было незначительным ("малая" помеха),
нужно обеспечить условие | ε |«1. Поскольку величина е случайна, это условие носит вероятностный характер и должно выполняться с вероятностью, близкой к единице. Выполнить указанное условие можно за счет увеличения мощности сигнала на входе приемника; за счет увеличения индекса модуляции, или при одновременном увеличении и мощности сигнала и его индекса модуляции.
Следует подчеркнуть, что стремление ослабить влияние помехи только за счет увеличения индекса модуляции, т. е. за счет неэнергетического параметра , может привести к обратному результату и вместо уменьшения ошибки произойдет ее резкое возрастание. Это связано с тем, что при увеличении индекса модуляции расстояние между соседними витками линии сигнала уменьшается, а вероятность попадания конца вектора s в окрестность одного из соседних витков возрастает. Перескоки вектора у из окрестности "своего" витка в окрестность иного витка связаны с появлением значительных ошибок, которые называются аномальными. Величина аномальных ошибок во много раз превосходит величину "нормальных" ошибок, которые характерны для "малой" (слабой) помехи.
Эффект, связанный с появлением аномальных ошибок, называется пороговым. Количественно пороговый эффект можно характеризовать величиной допустимой вероятности появления аномальных ошибок. До тех пор пока вероятность "перескоков" не превышает допустимой величины, считается, что имеет место "малая" помеха и оптимальный прием осуществляется в надпороговой области. Это означает, что отношение сигнала к шуму на входе превышает
пороговое.
Для объяснения применяемого способа формализации условий, приводящих к аномальным ошибкам при угловой модуляции (ФМ или ЧМ), можно рассмотреть следующую модель.
Принимаемое |
колебание, содержащее |
модулированный сигнал s(t) |
в аддитивной смеси с шумом |
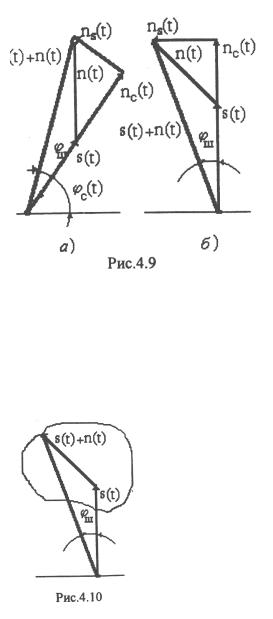
n(t), £ можно представить вектором на комплексной плоскости. Два варианта векторных представлений изображены на рис.4.9, a и б.
Вектор сигнала имеет постоянный модуль а и переменную фазу, зависящую от времени и модулирующего сообщения
ϕ(t) = 2πft +2πfд ∫t |
x(τ )dτ |
(4.27) |
0 |
|
|
Шум n(t) векторно суммиру
ется с вектором сигнала и суммарный вектор, изменяясь по модулю, вращается вокруг начала координат с переменной средней скоростью:
2πft +2πfд x(t)dt (4.28) Кроме того, фаза суммарного вектора флюуктуирует.
На рис.4.9,а флуктуации фазы учтены случайной добавкой φш к мгновенной фазе сигнала.
Для дальнейшего важно описание именно шумовой составляющей вектора принятого колебания s(t)+n(t). Поэтому удобнее рассматривать вектор этого колебания на плоскости, вращающейся вокруг начала координат со скоростью
2πf +2πfд x(t)dt . Такой вектор, фаза которого испытывает только шумовые
флуктуации, изображен на диаграмме рис.4.9 б
Если соотношение сигнал/шум велико, q>>l, модуль шумового вектора n(t) с очень большой вероятностью меньше модуля s(t) и траектория движения конца суммарного вектора будет примерно такой, как на рис.4.10.
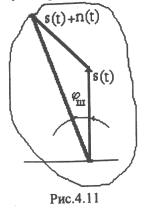
Суммарный вектор принимаемого колебания при q»l не обходит начало координат. Случайная
добавка к информационному параметру -фазе φш при ФМ или частоте |
fш = |
1 |
|
dϕш |
флуктуируют |
|
2π |
dt |
|||||
|
|
|
||||
около нулевого среднего значения, поскольку фаза шума равновероятна на симметричном интервале [-
π,π].
Если соотношение сигнал/шум мало q<l и модуль вектора шума соизмерим или меньше а, траектория движения конца суммарного вектора будет выглядеть примерно как на рис.4.11, т.е. время от времени будет охватывать начало координат. Каждому такому обходу соответствует приращение ( перескок ) полной фазы принимаемого колебания на 2π. Перескоку фазы соответствует скачкообразное изменение частоты. Такие перескоки дают аномальные выбросы на выходе демодулятора. Эти аномальные выбросы всегда перекрывают мгновенные значения выходного сигнала и искажают его до неузнаваемости. Вероятность таких импульсов можно принять в качестве оценки вероятности аномальной ошибки приема сигнала и, соответственно, вероятности W, характеризующей разборчивость речи. Для оценки вероятности аномальной ошибки можно поступить следующим образом. Вектор шума n(t) можно представить как сумму двух ортогональных
проекций: на направление вектора сигнала - синфазная компонента nc(t) и на ортогональное этому вектору направление - квадратурная компонента nс(t):
v(t)= vc(t) cos 2πf0t + vc(t) sin 2πf0t |
(4.29) |
Эти компоненты - нормальные случайные процессы. Спектры колебаний nс(t) и ns(t) сосредоточены в полосе, равной половине ширины спектра сигнала s(t), поскольку шум n(t) формируется в результате фильтрации белого шума в полосе спектра ЧМ сигнала, т.е. спектр шумовых компонент лежит в полосе [0;Fmax+fд].
Поскольку нормальные nс(t) и ns(t) ортогональны, они некоррелированы. Кроме того, они обладают нулевыми средними значениями и равными дисперсиями:
(nc2(t)) = (ns2(t)) = (n2(t)) =2N(Fmax+fд ) (4.30)
Вероятность того, что вектор входного колебания s(t)+n(t) совершит полный оборот вокруг точки |s(t)+n(t)| no направлению против часовой стрелки за малое время ∆t совпадает с вероятностью того, что совпадут сразу несколько событий:
-квадратурная компонента шума примет значение в малой окрестности нуля: │ns│<=∆/2 (4.31)
-синфазная компонента шума примет отрицательное значение, по модулю большее амплитуды сигнала:
nс< -a; (4.32)
- квадратурная компонента должна уменьшаться:
dns /dt <0 (4.33)
Вероятность таких совпадений - совместная эта элементарная вероятность
|
|
|
|
|
∆ |
|
∆ |
|
dn |
s |
|
|
|
|
|
|
|
|
|||||||
P1 |
= P |
|
ns |
≤ |
|
;nc < |
|
; |
|
< 0 |
(4.34) |
|
|
2 |
2 |
dt |
|||||||||
|
|
|
|
|
|
|
|
|
||||
Процесс dns /dt - получается из входного нормального колебания линейным преобразованием. Поэтому он тоже нормальный, как и n(t).
Протяженность интервала ∆ не больше, чем возможное приращение процесса s(t)+n(t) за время его корреляции ∆ t = 1/(fд+Fmax) т.е.
∆ = |
dns |
(t) |
∆t = |
dns (t) |
1 |
(4.35) |
|
dt |
dt |
|
fд + F max |
||||
|
|
|
|
||||
Это значит, что у производной dns /dt нулевое среднее, а дисперсия равна
|
f |
+F max |
|
2N ( fд + F max)3 |
|
σ 2. = 2 |
д |
∫ |
f 2 Ndf = |
(4.36) |
|
|
3 |
||||
ns |
|
0 |
|
|
кроме того, с учетом (4.34), (4.35) и (4.36):
∞ . |
|
a . |
|
∆ / 2 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
2 |
|
|
|
. 2 |
|
|
||||
|
|
|
|
3 |
|
|
|
|
|
n |
s |
|
|
|
n |
c |
|
|
n s |
|
|
||||||||||
P1 = ∫d ns |
∫d nc |
∫ |
|
|
|
exp{− |
|
|
− |
|
|
− |
|
}dnc = |
|||||||||||||||||
|
|
3 |
|
|
2σ |
2 |
|
2σ |
2 |
|
|
2 |
2 |
||||||||||||||||||
0 |
|
|
|
−∞ |
|
−∆ / 2 |
( 2 ) σ 3 / 2 fд |
|
|
|
|
|
|
|
2σ |
|
fд |
|
|
||||||||||||
|
. |
|
∞ . |
a |
|
|
∆ / 2 |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
. |
2 |
|
|
|
|
|
|
|
ns |
. |
|
|
|
3 |
|
|
|
|
|
|
|
n |
c |
|
|
n s |
|
|
|
|
|||||||||
|
∫d ns |
∫d nc |
∫ |
( |
|
|
|
exp{− |
|
|
− |
|
2 } = |
|
|||||||||||||||||
|
f |
2 |
3 |
|
|
|
2σ |
2 |
|
2σ |
2 |
fд |
|
||||||||||||||||||
|
|
0 |
|
−∞ |
|
−∆ / 2 |
2 ) |
σ 3 / 2 fд |
|
|
|
|
|
|
|
|
|
|
|
(4.37) |
|||||||||||
|
|
a |
|
|
|
|
|
2 |
|
|
∞ |
|
|
|
|
|
|
|
|
|
|
|
|
. 2 |
|
|
|
|
|
||
1 |
|
1 |
|
exp{− n |
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
n s |
|
|
|
. |
|
|||||||
|
|
|
|
c |
}dnc |
∫0 |
|
|
|
|
|
|
exp{ |
|
|
}d ns |
= |
||||||||||||||
2π −∫∞ 2πσ |
|
|
2σ 2 |
|
|
2πσ 2 f 2 |
д |
|
|
|
2σ 2 fд2 |
|
|
|
|||||||||||||||||
|
|
|
1 |
|
|
|
|
а |
|
∞ t 33 |
e |
−t |
dt = |
|
|
1 |
|
|
[1 |
− Ф( q)], |
|
|
|||||||||
|
|
|
|
1− |
Ф |
|
|
|
∫ |
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
2π |
|
2π 2 |
|
|
|
|
|
2 3π |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
2π |
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
σ n2 |
= 2Nfд ; |
|
|
|
|
|||
где σ 2. |
|
2Nf 3 |
|
2σ 2 |
f 2 |
|
||
= |
|
|
д |
= |
т |
д |
(4.38: 4,39; 4.40) |
|
|
3 |
|
3 |
|
||||
n |
|
|
|
|
|
|
||
|
. |
|
1 |
|
|
|
|
|
∆ = ns |
|
|
|
|
|
|
||
fд |
|
|
|
|
||||
|
|
|
|
|
|
|
||
Вероятность того, что вектор входного колебания совершает полный оборот вокруг нуля против часовой
стрелки хотя бы один раз за время, |
равное интервалу корреляции сообщения x(t), т.е. за время τ=1/fд |
||
при fд>Fmax и при m>1 или |
τ=1/Fmax |
при |
fд=<Fmax, т.е. при m<=l составляет |
|
|
|
|
f |
д |
|
при...mчм > 1 |
|
τ |
|
|
|
|
||
|
|
|
|
||||
P = |
P1 |
Fmax |
|
|
|||
|
= F |
|
(4.41) |
||||
∆t |
|
||||||
|
|
|
max |
при...mчм ≤ 1 |
|||
|
|
|
|||||
|
|
|
|
fд |
|
|
|
|
|
|
|
|
|
||
Учитывая, что вероятность обхода нуля по часовой стрелки и против часовой стрелки равны, можно утверждать, что полная вероятность аномального выброса в два раза больше Р.
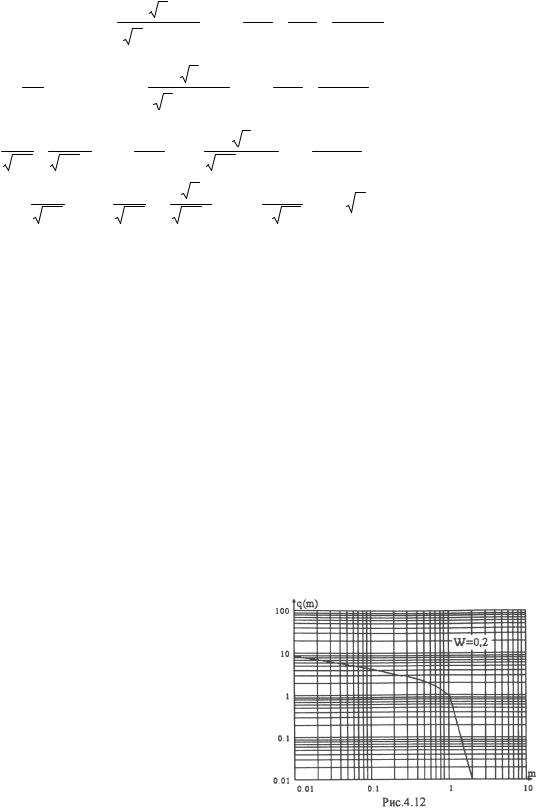
Полагая граничное значение вероятности аномальной ошибки при приеме каждого слога W=0,2 из (4.37) и (4.41), можно найти пороговое соотношение сигнал/шум в полосе приемника с угловой модуляцией, при котором уже не обеспечивается разборчивость речи. Диаграмма обмена между индексом частотной модуляции и входным соотношением сигнал/шум приемника представлена на рис.4.12.
Оценка вероятности аномальной ошибки при угловой модуляции в соответствии с (4.41) разведывательного является несколько заниженной,
пессимистической. Во всех реальных демодуляторах возможно (хотя и маловероятно) наличие больше, чем одного выброса за период частоты Fmax. Кроме того ,полученная оценка характеризует

аномальные искажения в обычном приемнике с амплитудным ограничителем на входе частотного детектора. Но такая схема демодуляции ЧМ далека от оптимальной при сравнительно сильных шумах. Анализ показывает, что демодулятор, оптимальный в смысле максимального правдоподобия, должен строиться на основе следящей схемы автоподстройки частоты. Например, на основе системы ФАПЧ, как на схеме рис.4.13.
При использовании следящего приема ЧМ тоже приходится считаться с пороговым эффектом. Но механизм проявления этого эф-
фекта иной. При работе следящая |
система |
|
ФАПЧ |
подстраивает местный |
гетеродин |
подмгновенную частоту входного процесса. Для этого гетеродин должен иметь перестройку в полосе ±fд около номинального значения несущей частоты fo. Полоса ∆fyд =2fд - это полоса удержания системы ФАПЧ. Для
обеспечения слежения за частотой входного сигнала в полосе удержания на управляемый гетеродин должна подаваться копия принимаемого сообщения. Эта копия формируется на выходе системы ФАПЧ. Формирование выходной копии без значительной динамической ошибки возможно, если система ФАПЧ не исказит спектра принимаемого сообщения, т.е. будет иметь полосу, не меньшую FmахПримерно такой же будет и эквивалентная шумовая полоса системы ФАПЧ.
Аномальная работы системы ФАПЧ - это срыв синхронизма, т.е. нарушение установившегося процесса слежения за частотой. Теория переходных процессов в такой существенно нелинейной системе, какой является ФАПЧ, достаточно разработана и позволяет оценивать характеристики срыва синхронизма при заданных параметрах самой системы и входного воздействия. Однако для рассматриваемой задачи оценки достоверности приема, достаточно использовать общеизвестный вывод о том, что устойчивая, без срывов, работа системы ФАПЧ будет в том случае, если соотношение
сигнал/шум в полосе этой системы составляет |
|
qвх=(5….10) |
(4.42) |
Приняв в качестве порогового минимальное значение qфапч~5 и учитывая, что спектральная плотность шума на входе системы ФАПЧ (в полосе ' УПЧ приемника) составляет
|
N = |
Pш |
|
|
(4.43) |
|
||
|
2( fд + F max) |
|
|
|||||
можно получить |
|
|
|
|
|
|
|
|
qфапч = |
Pc |
|
= qвх = |
2( fд + F max) |
= 2qвх (mчм +1) |
(4.44) |
||
2NF max |
|
|||||||
|
|
F max |
|
|
|
|||
На основании (4.44) можно получить соотношение для построения диаграммы обмена входного соотношения сигнал/шум на индекс частотной модуляции для оптимального демодулятора, использующего систему ФАПЧ:
qвх=2.5/(mчм+1) (4.45)
Построенная в соответствии с (4.45) диаграмма приведена на рис.4.14.
На рис.4.15 совмещены зависимости порогового соотношения сигнал/шум для реального частотного детектора с ограничителем на входе и для
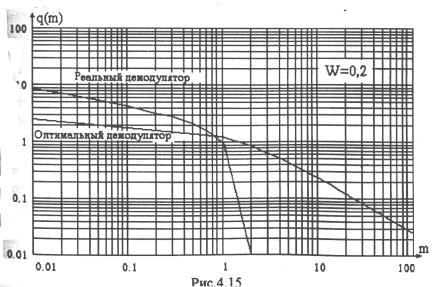
оптимального демодулятора ЧМ.
Графики на рис.4.15 позволяют наблюдать парадоксальный эффект: при q<l реальный частотный демодулятор оказывается лучше оптимального. Но этот парадокс разрешается очень просто:
пороговое соотношение на входе реального детектора получено на основе анализа только аномальных ошибок. При q>1 и m>1 вовсе не аномальные ошибки определяют качество работы дискриминатора, а выходные шумы , мощность которых примерно в m раз меньше мощности шумов на вход.
По-видимому, в качестве осторожной оценки порогового соотношения сигнал/шум следует использовать зависимость рис.4.14.
Представляет интерес аналитическая аппроксимация зависимости порогового соотношения сигнал/шум от индекса частотной модуляции.
В качестве хорошей аппроксимирующей функции, описывающей пороговые свойства реального демодулятора при больших шумах и оптимального - при малых, можно использовать
qвх (m) |
1.65 |
0.8 |
|
|
m+m +0.16 |
(4.46)
Фазовая модуляция обычно не применяется для передачи непрерывных сообщений [27]. Это утверждение, однако, требует некоторых комментариев.
1. Напряжение на выходе частотного детектора всегда пропорционально частоте входного сигнала. Поэтому шум с равномерным в полосе УПЧ спектром превращается частотным детектором в случайное колебание с параболической зависимостью спектральной плотности от частоты. В таких условиях, чтобы избежать существенных искажений высокочастотных составляющих сообщения, их "подчеркивают" на передающей стороне, т.е. пропускают модулирующую функцию через дифференцирующий фильтр. Но модуляция частоты производной от сообщения - это модуляция сигнала по фазе.
2. Технически, чтобы получить большую девиацию частоты стабильного по средней частоте несущего колебания, используют фазовый модулятор на низкой частоте задающего генератора и умножают частоту полученного ФМ колебания до номинала несущей, пропорционально умножая размах фазовых отклонений до больших индексов mфм >>2π.
3. Ширина спектра ФМ сигнала пропорциональна ширине спектра модулирующего сообщения, тогда как при ЧМ с большим индексом ширина спектра сигнала определяется, прежде всего и в основном, девиацией частоты и от Fmax почти не зависит. Поэтому на практике при передаче непрерывных соотношений предпочитают использовать ЧМ
Учитывая сказанное можно считать, что полученные оценки пороговых сигналов при ЧМ достаточно характеризуют все практически применимые виды угловой модуляции. Тем не менее, для полноты картины можно построить диаграмму для определения порогового соотношения сигнал/шум при ФМ непрерывным сообщением. Легче всего такую зависимость получить, используя связь между индексами модуляции и шириной спектра сигнала при ЧМ и ФМ.
Пусть два сигнала - ЧМ с индексом mчм и ФМ с индексом ∆φфм образуются в результате модуляции несущего колебания одним и тем же сообщением x(t) e [-1;+1 ].
Ширина спектра при ЧМ определяется соотношением (4.9):
∆fчм=2(fд+Fmax)=2(mчм+1)Fmax
При ФМ исследования и расчеты [26] показывают, что ширина спектра с достаточной точностью может быть оценена как
∆fфм=2Fmax(1+∆φфм) (4.47)
Приравнивая (4.46) и (4.47), можно получить
(mчм+1)Fmax=Fmax(1+∆φфм) (4.48)
откуда сразу следует, что у эквивалентных по ширине спектра сигналов с разными типами угловой модуляции
mчм=∆φфм (4.49)
идля оценки порогового сигнала при ФМ можно пользоваться той же диаграммой рис.4.15.
4.2.Перехват сигналов систем с кодово-импульсной модуляцией
Цифровые методы передачи информации, основанные на использовании сигналов с кодовоимпульсной модуляцией (КИМ), находят применение не только в системах передачи данных и командных радиолиниях, но и в системах связи, для которых традиционно использовались рассмотренные ранее аналоговые сигналы. Соответственно сигналы с КИМ приходится рассматривать как важный класс разведываемых сигналов, а качество несанкционированного приема таких сигналов, как важный показатель эффективности функционирования средств радиоразведки. В дальнейшем качество перехвата цифровых сигналов оценивается вероятностью ошибки приема каждого отдельного элемента (символа). Вопросы синхронизации средств разведки с передающими устройствами объектов разведки ниже не рассматриваются, хотя эти вопросы весьма существенны при организации перехвата сообщений в многоканальных системах с временным разделением каналов. За пределами рассмотрения оказались также методы декодирования и дешифрации перехваченных сообщений: считается, что это задачи криптоанализа, а не радиоразведки.
Вероятность ошибки приема символа КИМ при перехвате сигнала средством РТР зависит от многих факторов. Для оценки потенциально достижимой вероятности ошибки можно принять следующие предположения и допущения относительно сигнала объекта разведки [28].
1. Сигнал КИМ представляет собой поток из статистически независимых равновероятных двоичных символов So(t) и S1(t) (логические значения символов "О" и "1"); мощность сигнала Рс, длительность символа τc, энергия символа Qc= Рс τc.
2. Сигнал наблюдается приемником средства разведки в аддитивной смеси с нормальным стационарным шумом n(t):
x(t)=s(t)+n(t), |
(4.50) |
спектральная плотность шума No.
3. Сигнал может иметь пассивную паузу (КИМ-АМ), когда передаче символа "О" соответствует пауза в излучении, т.е. So(t)=0, или активную паузу (КИМ-ЧМ или КИМ-ФМ), когда So(t)≠0 и S1(t)≠0, а энергии сигналов So(t) и S1(t) одинаковы.
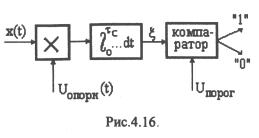
Оптимальный алгоритм работы приемника при сделанных предположениях сводится к вычислению корреляционного интеграла принятого колебания x(t) с опорным напряжением и сравнение значения этого интеграла с пороговым уровнем [28]. Работу приемника в соответствии с таким алгоритмом можно иллюстрировать структурной схемой рис.4.16.
Для сигнала с пассивной паузой
τ |
|
|
Qc |
|
|
ξ = ∫c |
x(t)s1 |
(t)dt<> |
(4.51) |
||
|
|||||
0 |
|
2 |
|
||
Если выполняется верхнее неравенство, принимается решение о наличии на входе сигнала S1(t), если нижнее - So(t). Для. сигнала с активной паузой
τ |
|
|
Qc |
|
|
ξ = ∫c |
x(t)[s1(t) − s0 |
(t)]dt<> |
(4.52) |
||
|
|||||
0 |
|
2 |
|
||
Ошибки случаются тогда, когда нормальная случайная величина ξ оказывается ниже порога при наличии на входе приемника сигнала So(t) и тогда, когда Е, меньше порога, а на входе колебание x(t) содержит сигнал s1(t). Вероятность ошибки, определенная на основе этих соображений, составляет
|
1 |
|
|
Qc |
|
|
|
|
|
|
|
|
Pоо = |
|
|
−Ф |
|
|
(1 |
− ρ |
s |
) |
|
|
|
|
|
|
|
|
(4.53) |
|||||||
2 |
1 |
|
No |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
где Ф(-) - интеграл вероятностей в форме Ф(t) = |
π |
∫0 |
|
2 dt; |
ρs [−1,1] - коэффициент |
|||||||
2 |
t |
e−t |
||||||||||
взаимной корреляции сигналов s1(t) и s0(t):
ρ |
|
= |
1 τc |
s |
|
(t)s (t)dt |
(4.54) |
|
s |
|
∫0 |
0 |
|||||
|
|
Qc |
|
1 |
|
|||
|
|
|
|
|
|
|
||
для сигналов с пассивной паузой и для сигналов с КИМ-ЧМ ρs=0 (ортогональные сигналы s1(t) и s0(t)), а для сигналов с КИМ-ФМ ρs=cos φ, где φ - индекс фазовой модуляции. Таким образом, ρs=-1 для противоположных сигналов, когда φ = π/2.
В (4.53) нужно учитывать, что при равновероятных символах s1(t) и s0(t) мощность сигнала с пассивной
паузой в два раза меньше, чем у сигнала с активной паузой.
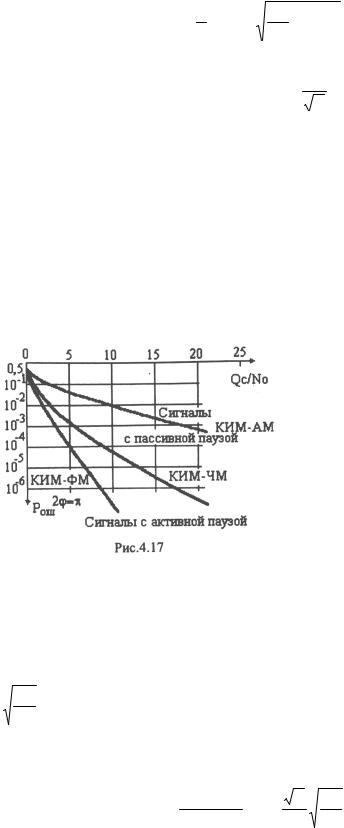
С учетом сказанного, на основании (4.53) и (4.54) можно получить зависимости вероятностей ошибок оптимального приема символов сигнала с кодово-импульсной модуляцией от соотношения сигнал/шум [28]. Эти зависимости представлены на рис.4.17.
Разумеется, потенциальные оценки качества приема сигнала дают не больше, чем ориентировочную нижнюю границу вероятности ошибки на символ, поскольку они определяются для некоторых идеальных моделей сигналов, шумов и способов построения приемника. Реально в приемниках средств радиоразведки применяются некогерентные методы
обработки сигналов с КИМ-АМ и КИМ-ЧМ. Для перехвата сигналов с КИМ-ФМ приходится применять некоторые разновидности когерентного приема [28].
Способ некогерентного приема сигналов КИМ при амплитудной модуляции (манипуляции) несущего колебания предполагает использование в приемнике детектора огибающей входного сигнала. При этом пороговый уровень различения сигналов s1(t) и s0(t) зависит от соотношения сигнал/шум Qc/No в полосе ∆f=1/τc. Как показано в [28], при оптимально выбранном пороге и соотношении сигнал/шум
QcNo > 4 (при этом эффективность разведки достаточно высока и сигнал РЭС средства разведки может
быть принят со сравнительно высокой вероятностью) вероятность ошибки реального некогерентного приемника будет
|
Pоо .нк |
|
π |
Qc |
(4.55) |
|
|
2 |
No |
||
|
Рош.опт |
ам |
|
т.е. больше, чем при оптимальном приеме (рис.4.16).
Некогерентный приемник сигналов с КИМ - ЧМ содержит два фильтра, настроенных на частоты сигналов s1(t) и s0(t), детекторы огибающей сигналов на выходах этих фильтров и компаратор для