

РАДИОЭЛЕКТРОННАЯ БОРЬБА: РАДИОРАЗВЕДКА И РАДИОПРОТИВОДЕЙСТВИЕ
.pdfпеленгатора и направлением на источник излучения. Этот угол дополняет ϕи до 90° и потому, как следует из (1.24),
cosϕи= c∆φ/ω0d |
(1.25) |
Метод использования базы для измерений |
пеленга получил дальнейшее развитие при |
построении автоматических двухканальных пеленгаторов с вращающимися антеннами [4]. В современных системах радио- и радиотехнической разведки такие пеленгаторы широко используются в называются доплеровскими [8]. Пеленгаторы работают в диапазонах KB и УКВ. Основная упрощенная схема доплеровского пеленгатора иллюстрируется рис. 1.21.
На рис.1.22 представлена функциональная схема доплеровского пеленгатора.
Две антенны, ненаправленные в горизонтальной плоскости (например, вертикальные штыри
A 11 и А12 ), расположены симметрично относительно оси и вращаются с угловой скоростью Ω, описывая цилиндрическую поверхность радиуса R.
Если РЭС излучает сигнал s(t) на частоте ω, сигналы во вращающихся таким образом антеннах составят
s1(t)=acos[ωt−ϕ1(t)]=acos[ω(1-(VR(t)/c))t] s2(t)=acos[ωt+ϕ2(t)]=acos[ω(1+(VR(t)/c))t] (1.26)
где ϕ(t) - фаза сигнала, изменяющаяся во времени в силу взаимного движения антенны и источника излучения; VR(t) - радиальная скорость этого движения - проекция линейной скорости движения антенны на направление прихода сигнала, равная
VR(t)=Vcosα(t)=ΩR cosα(t); |
(1.27) |
a(t) - мгновенное значение угла между направлениями на источник излучения (пеленгом разведываемого РЭС ϕи) и вектором линейной скорости вращающейся антенны V.
В (1.26) учтено, что вторая антенна вращается в противоположную сторону и сдвиг фаз сигнала в этой антенне имеет, при том же модуле, другой знак. Приемники пеленгатора перемножают колебания с выходов двух симметричных антенн. Результат перемножения, с точностью до усредняемых в фильтрах
осциллирующих составляющих на частотах 2ω, дает |
|
|
S=s1s2=a/2*sin(2ω(VR/c)t) |
(1.28) |
|
или с учетом (1.26) |
|
|
S= a/2*sin [(2ω/c)ΩRsin(Ωt+ϕи)] |
(1 29) |
|
Это колебание с периодической угловой модуляцией. Спектр колебания содержит гармоники |
||
известной частоты Q вращения антенны [13]: |
|
|
∞ |
|
|
S=a/2 ∑ J 2n+1(2(ω / c)ΩR)sin(2n +1)(ΩR + ϕи ) |
(1.30) |
|
n=1 |
|
|
где Jk(m) - функция Бесселя порядка n от аргумента m=.2(ω/c)ΩR=2πΩ2R/λ. |
|
|
Фильтром всегда можно выделить первую гармонику этого напряжения |
|
|
S(1)= a/2J1(2(ω/c)ΩR)( sin(2n +1)(ΩR + ϕи ) |
|
(1.31) |
и, используя формируемые генератором опорного напряжения |
(ГОН) |
колебания, синхронные и |
синфазные с вращением антенны ( sincosΩΩtt ), можно вычислить оценку пеленга ϕ*и так:
ϕ*и=arctgY/X=arctg[(S(1)sinΩt)/(S(1)cosΩt)] (1.32)
Технически в доплеровских пеленгаторах используют кольцевую д решетку неподвижных антенн, расположенных по образующим цилиндра радиуса R, и периодически подключаемых парами ко входу приемника. Скорость коммутации Ω. Если в составе пеленгатора используется многоканальный приемник, то с его помощью можно определять направления на разные РЭС, если они работают на разных несущих частотах.Современные доплеровские пеленгаторы работают в диапазоне 20 МГц...2 ГГц и обеспечивают при этом точность пеленгования не хужеσϕ<=20 [8].Точность пеленгования определяется как мощностью сигнала РЭС, так и базой пеленгатора
R (вернее, величины 2R/λ ).
Точность определения направления и оперативность получения информации о пеленге, на РЭС объекта разведки в значительной степени зависит от способа обзора пространства в области интересов разведки. В РРТР используются беспоисковый (одновременный) и поисковый (последовательный) способы определения направления на источник электромагнитного излучения.
Сущность беспоискового способа обзора пространства состоит в одновременном приеме сигнала несколькими антеннами с разных направлений. Антенны при этом должны иметь узкие и развернутые в пространстве диаграммы направленности [8]. |
Беспоисковые пеленгаторы применяются в диапазоне средних, коротких и метровых волн и служат для оповещения об облучении летательного аппарата в станциях оперативной радиотехнической разведки для непосредственной поддержки РЭП.
При поисковых способах определения направления на источник излучения применяются вращающиеся антенны [8].
Глава 2. СИСТЕМЫ МЕСТООПРЕДЕЛЕНИЯ В РРТР
Пространственные координаты расположения объектов разведки определяются многопозиционными системами РРТР. Сначала, на первом этапе, на основании анализа радиотехнических параметров сигналов объектов разведки определяются геометрические параметры (пеленг, направляющие косинусы или разности дальностей). Затем, на втором этапе, на основе геометрических параметров вычисляются пространственные координаты. Чаще всего средства РРТР для местоопределения источников излучения используют триангуляционные методы. Но находят применение и иные методы - взаимокорреляционные, основанные на разностно-дальномерных измерений. Возможно
применение комбинированных методов местоопределения.
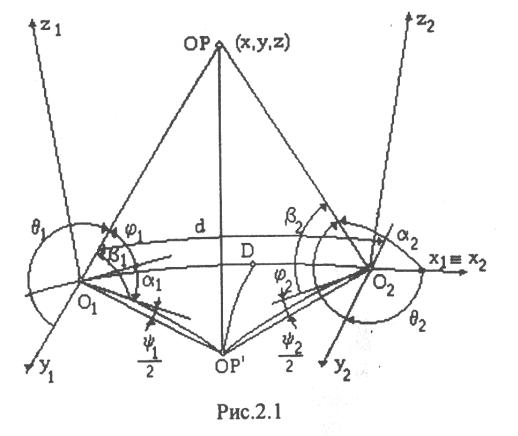
2.1. Триангуляционные системы
Принцип триангуляционного местоопределения на основе измерений азимута и угла места источника излучения иллюстрируется чертежом рис.2.1. Линией положения - геометрическим местом точек, которым соответствуют постоянные значения измеренного азимута α =const и угла места β =const является прямая. Поэтому точка положения излучающего объекта пространстве может быть определена на пересечении двух таких прямых, по двум парам оценок (α ,β ), измеренных в двух точках, разнесенных в пространстве.
Пеленгаторы расположены на поверхности Земли на расстоянии d друг от друга. С пеленгаторами связаны декартовы топоцентрические системы координат соответственно O1x1y1z1 и
O2x2y2z2.
Если в качестве основной системы принять ситему O1x1y1z1≡Oxyz, то координаты объекта развертки в этой системе можно оценить на основе очевидных из рис.2.1 геометрических построений
y=xtgα1=(d-1)tg(π/2−α2) (2.1)
откуда
x=d(tgα2)/( tgα2 - tgα1)=d(sinα2 cosα1)/sin(α2 - α1 ) |
(2.2) |
y=d(tgα2 tgα1)/( tgα2 - tgα1)=d(sinα2 -sinα1)/sin(α2 - α1 ) |
(2.3) |
Координата z определяется из треугольника O1OP'OP: |
|
z=d(sinα2 sin(β1-ϕ1/2))/sin(α2 - α1 )cos((β1+ϕ2) |
(2.4) |
где |
|
ϕ1 =(Y/R) sinα1 =(d/R)* sinα2 /sin(α2 - α1 ) |
(2.5) |
R. - радиус Земли для той области, где работают пеленгаторы.
Для уточнения координаты z целесообразно использовать ее значение, получаемое из
треугольника O2OP'OP: |
|
z=d(sinα1 sin(β1+ϕ1/2))/sin(α2 - α1 )cos((β2+ϕ2) |
(2.6) |
где |
|
ϕ2 =(Y/R) sinα2 =(d/R)* sinα1 /sin(α2 - α1 )+∆z |
(2.7) |
∆z - превышение точки расположения второго пеленгатора над точкой O1.
Для определения трех пространственных координат объекта разведки в принципе достаточно трех независимых измерений. В четырех измерениях (двух азимутов и двух углов места) содержится избыточность. Но практически число измерений для местоопределения не только не уменьшают, но даже увеличивают за счет применения большего числа пеленгаторов. Действительно, при двух пеленгаторах возможны такие ситуации, когда по крайней мере две из трех пространственных координат не определяются. Это непосредственно следует из (2.2), (2.4) и (2.5) при α1=α2.
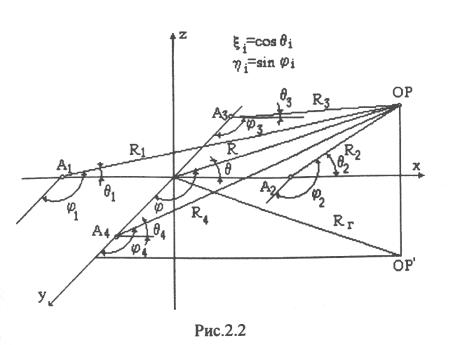
Триангуляционный метод с использованием фазового пеленгатора,оценивающего направляющие косинусы, иллюстрируется чертежом рис.2.2.
Пусть в четырех разнесенных точках приема A1...A4 (рис.2.2) с базами разнесения
A1A2=A3A4=d установлены четыре независимых радиопеленгатора любого типа. Каждый из пеленгаторов измеряет направляющие косинусы пеленгов цели
cosϕi =η i; |
cos θi=ξi ; |
i=1:4 |
(2.8) |
По измерениям направляющих косинусов определяется местоположение объекта разведки (0Р) в системе координат Ozxy, т.е. декартовы координаты х, у, z источника излучения.
Из рис.2.2 следуют геометрические соотношения:
|
R 12 =R2+xd+d2/4; R 22=R2-xd+d2/4; |
|
|
||
|
R 32 =R2+yd+d2/4; R 42=R2-yd+d2/4; |
|
(2.9) |
||
С учетом соотношений |
|
|
|
|
|
x+d/2=R1ξ1; |
x-d/2=R2ξ2; x= R3ξ3 = R4ξ4; |
|
|
||
y=R1η 1= R2η 2; y+d/2= R3η 3; |
y-d/2= R4η 4; |
(2.10) |
|||
R4= R3*ξ3/ξ4 ; |
R2= R1*η 1/η 2 ; |
|
|
|
|
Из (2.9) и (2.10) следует: |
|
|
|
|
|
2x=R1(ξ1+ξ2*η 1/η 2); |
2y=R3(η 3+η 4*ξ3/ξ4); |
} |
|
|
|
R1ξ1= R2ξ2+d; |
R3η 3= R4η 4+d; |
(2.11) |
|
||
Отсюда следуют соотношения для вычисления дальностей до цели, что часто бывает необходимо в системах РРТР:
R1d-1=(ξ1+ξ2*η 1/η 2)-1; |
R3d-1=(η 3+η 4*ξ3/ξ4)-1; |
|
|
|
|
} |
|
||||
R2d-1=η 1/η 2 (ξ1-ξ2*η 1/η 2)-1; |
R4d-1=ξ3/ξ4 (η 3-η 4*ξ3/ξ4)-1; |
|
(2.12) |
||||||||
а для вычисления двух декартовых координат можно получить соотношения: |
|||||||||||
|
2x/d=(ξ1+ξ2*η 1/η 2)* (ξ1-ξ2*η 1/η 2)-1; |
(2.13) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
2y/d=(η 3+η 4*ξ3/ξ4)* (η 3+η 4*ξ3/ξ4)-1 |
|
|||||||||
Так как 2R2=R12+R22-d2/2, bp (2.13) получается дальность до объекта разведки: |
|||||||||||
2R / d = |
2[1+ (η /η |
2 |
)2 ] (ξ |
1 |
− ξ |
2 |
η /η |
2 |
)−2 −1 |
(2.14) |
|
|
1 |
|
|
|
1 |
|
|
||||
Используя (2.4) и (2.14), можно вычислить высоту объекта разведки над поверхностью Земли: |
|||||||||||
z / d = (R / d )2 |
− (x / d )2 |
− (y / d )2 |
|
|
(2.15) |
||||||
Имея координаты x,y,z,R, нетрудно вычислить направляющие косинусы цели cosθ=x/R; cosϕ=y/R; cosβ=z/R;
При необходимости можно вычислить азимут α и угол места β цели tgα= cosϕ/ cosθ=y/R;
cos β = cos2 θ + cos2 ϕ = (x / R)2 + (y / R)2 |
(2.16) |
Траингуляционное местоопределение по методу (рис.2.1) основывается на использовании четырех пеленгаторов, каждый из которых измеряет два угловых параметра: азимут и угол места источника излучения (или соответствующие этим параметрам направляющие косинусы), т. е. всего используется восемь оценок угловых координат источника излучения. Такие измерения, на первый взгляд, избыточны: для определения тройки пространственных координат {x,y,z} необходимо и достаточно наличие только трех независимых измерений, а их можно получить из двух точек (например, взяв два азимута и один угол места). Но при угловых измерениях из двух точек задача местоопределения может вырождаться: по таким измерениям нельзя определить координаты объекта, если он располагается на прямой, продолжающей базовую линию двух измерителей. Кроме того, увеличение числа измерений всегда (при правильной обработке) повышает точность местоопределения.
Для триангуляционного определения пространственных координат объекта разведки вовсе не обязательно использовать неподвижные пеленгаторы, как на рис.2.1. Пеленгаторы могут перемещаться в пространстве, но при этом нужно, чтобы законы их движения (траектории) были бы известны и временные зависимости собственных мгновенных координат {x(t),y(t),z(t)} учитывались бы при
обработке. Так, на рис.2.3, а иллюстрируется местоопределение |
наземного объекта по пеленгам с борта |
самолета радиотехнической разведки, а на рис.2.3,б - с борта разведывательного ИСЗ. |
|
Измеряя пеленги на источник излучения в разных точках, |
которые |
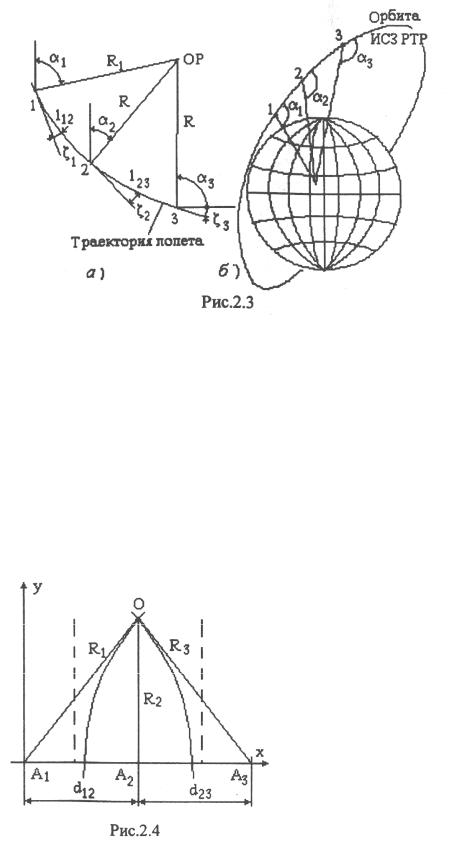
последовательно занимает разведывательный летательный аппарат при движении по траектории 2.3,а или по орбите 2.3,б и,зная координаты этих и чек, можно вычислить неизвестные координаты неподвижного излучающее объекта.
2.2. Разностно-дальномерные системы местоопределения
Триангуляционная система местоопределения поддерживается измерениями пеленгов (или направляющих косинусов) объекта разведки. совокупности оценок пеленгов из разных точек пространства разрушена информация о взаимной корреляции сигналов разведываемого объекта этих точках. Учет такой информации может существенно повысить точность местоопределения. Взаимную корреляцию сигналов в разных разнесенных точках используют разностно-дальномерные методы местоопределения. Геометрические соотношения, иллюстрирующие применение метода разностнодальномерного местоопределения, иллюстрируются рис.2.4.
|
Местоположение источника излучения |
||||
на |
плоскости определяется в результате измерения |
||||
|
разности моментов времени приема сигнала в |
||||
|
двух точках разнесенных на величину базы d. |
||||
|
Геометрическое |
|
место |
точек, |
|
|
соответствующих |
измеренной разности |
|||
|
дальностей |
R1(x,y)- R2 |
(x,y)=∆R12*=const, это |
||
|
гипербола. Точка положения источника |
||||
|
излучения находится как точка пересечения |
||||
|
двух гипербол, для построения которых нужно |
||||
|
измеритьдве разности дальностей: |
|
|||
|
∆R12* и ∆R23* на двух базах d12 и d23. Для |
||||
|
определения трех пространственных координат |
||||
|
нужно, |
соответственно, |
получать |
три |
|
|
независимых измерения на трех базах. |
|
|||
|
Для измерения разности дальностей до |
||||
объекта разведки применяются взаимокорреляционные измерители. Схема взаимокорреляционного измерителя приведена на рис. 2.5.
Она подобна схеме фазового пеленгатора и содержит двухканальное радиоприемное устройство с общим гетеродином (Г) на оба канала, измерительной линии задержки (ЛЗ), непосредственно измерителя, состоящего из перемножителя и интегратора, системы управления (СУ), синхронно управ ляюшей линиями задержки. В этом следящем измерителе сигналы с выходов обоих каналов перемножаются, результат перемножения усредняется и управляет задержкой в измерительной линии
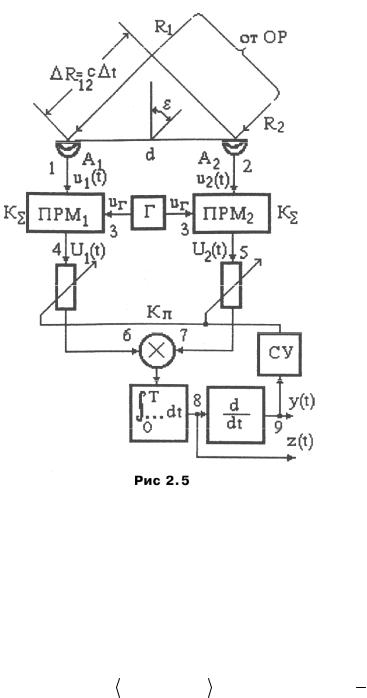
(ЛЗ), устанавливая ∆τ, при котором максимизируется выходной эффект измерителя z(t). Оценка ∆τ - это формируемый схемой выходной отсчет.
На выходе включена дифференцирующая цепь d / dt для формирования нечетной дискриминационной характеристики измерителя.
Волна от источника излучения падает под углом ε к нормали к базе d=A1A2. Поскольку расстояние до источника излучения очень велико и R.»dB, лучи, приходящие на каждую антенну, приблизительно параллельны. При этих условиях в точках 1 и 2 на выходах антенн создаются напряжения
u2(t)=u1(t)=Rе{E1(t)ejw0t}; (2.17)
u1(t)=u1(t-∆t)=Rе{E1(t-∆t)ejw0t}; (2.18)
где ∆t=∆R/c=(R1-R2)/c=t1-t2=∆t12 (2.19)
измеряемая взаимокореляционным измерителем разность задержек когерентных сигналов, связанная с пеленгом соотношением
ξ=∆R12=dcosθ=c∆t (2.20)
Общий гетеродин в точке 3 создает напряжение
UГ(t)=Re{EГej(ω0+ωпр)t}.
При идеальных идентичных комплексных коэффициентах передачи приемников КΣ в точках 4 и 5 формируются напряжения
U2(t)= КΣRe{EO(t)EГej*ωпр* t} |
|
U1(t)= КΣRe{EO(t-∆t)EГej*ωпр* te-jωo∆t } |
(2.21) |
Вводя в рассмотрение высокочастотную взаимокорреляционну функцию принимаемого сигнала
Ko(τ ) = u0 (t)u0 (t + τ ) = T∫u0 (t)u0 |
(t + τ )dt = |
1 Re{Ro(τ )e jω0τ }, (2.22) ,где |
0 |
|
2 |
T . |
. |
|
Ro(τ ) = ∫ E o(t) E o(t + τ )dt (2.23)
0
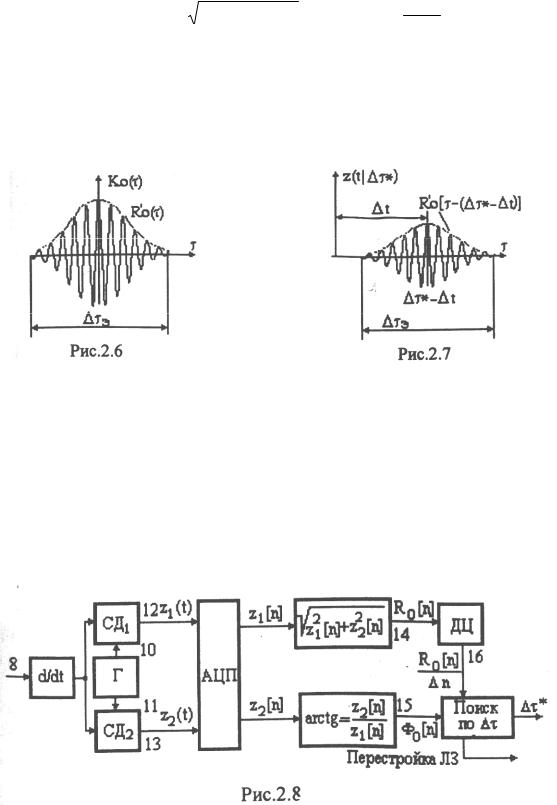
- огибающая корреляционной функции Ко(τ) рис.2.6.
.
Иногда удобно представить u o(t) = uo(t)exp[-jϕ0t)]. Тогда (2.22) дает решение
Ko(t) = M (τ ) cos(ω0t) + N (τ )sin(ω t) = Ro/ (τ ) cos[ω0t − Фo(τ )] |
(2.24) где |
||||||||||
M |
T |
. |
. |
cos |
|
(t) − ϕ |
|
(t + τ )]dt |
(2.25) |
||
|
(t) = |
∫ |
E o(t) E o(t + τ ) |
[ϕ |
0 |
0 |
|||||
|
|
|
|
|
|
|
|
|
|||
|
N |
0 |
|
|
sin |
|
|
|
|
|
|
Ro/ (τ ) = M 2 (τ ) + N 2 |
|
N (τ ) |
|
(2.26) |
|
|
|
|
(τ );Фo(τ ) = arctg |
|
|
|
|
||||
|
M (τ ) |
|
|
|
|
|||
Выходной эффект измерителя в точке 8 по схеме рис. 2.5. имеет вид |
|
|
|
|
|
|||
T |
T . |
. |
|
|
− jw0 |
∆te − jwпр (t−∆t*) |
|
|
Z (τ ) = 2Kпер ∫u1(t −τ )u2 (t − ∆τ*)dt = |
K Re{∫ E o(t − ∆t −τ ) E o(t − ∆τ*)e |
dt} |
||||||
|
|
|||||||
0 |
0 |
|
|
|
|
|
|
|
Сравнивая полученное решение с (2.22) можно установить, что полезный выходной эффект
измерителя совпадает со смещенной автокорреляционной функцией принимаемого сигнала (2.24):
Z(t)=Z[τ-(∆t*-∆t)]=KвзкКо[τ-(∆τ*-∆t]wo=w пр |
(2.27) |
где К.взки - полный коэффициент передачи измерителя.
Выходной эффект (2.27) измерителя взаимокорреляционной функции в точке 8 воспроизведен на рис.2.7.
Полученное решение (2.27) позволяет сделать следующие выводы. Выходной эффект взаимокорреляционного измерителя соответствует смещенной на ∆τ*-∆t=∆τи
автокорреляционной функции Ко(τ) принимаемого радиосигнала с отличием лишь частоты заполнения (ωпр вместо ωо). При установке измерительной ЛЗ на величину задержки
∆τ*=∆t=(d/c)*sinε=ξ^ /c
Z(τ) совмещается с Ко(τ) по методу максимума.
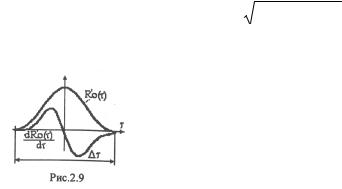
Для повышения точности измерителя система, следящая за задержкой ∆τ, формирует производную dКо(τ)/dτ. Измерения взаимокорреляционной функции можно проводить по огибающей выходного эффекта Ro'[τ-∆τ^-∆t] , но точность отсчета задержки при этом будет ниже .
Структуру цифрового измерителя разности задержек сигнала на основе системы слежения за максимумом взаимокорреляционной функции представлена на рис.2.8. Это по сути цифровая приставка к измерителю
(рис.2.5).
Для преобразования сигналов с выхода измерителя рис.2.8 (z(t) в точке 8) в цифровую форму служат два синхронных детектора с ортогональными опорными напряжениями:
uоп1 (t)=Re{EГ(t)ej*ωпр(t) } в точке 10 и| uоп2 (t)=Im{EГ(t)ej*ωпр(t) } в точке 11
В результате на выходе СД1 и СДД2 формируются аналоговые напряжения:
z |
|
|
|
(τ ) = z |
|
|
|
cos |
|
(∆τ * −∆t)+ Фо[∆τ − (∆τ * −∆t)]} |
|
1 |
|
|
1 |
[∆τ − (∆τ * −∆t)]= KRo'[∆τ − (∆τ * −∆t)]* |
{ω |
пр |
|||||
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
sin |
|
|
|
|
|
2 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
(2.30) В аналогово-цифровом преобразователе (АЦП) эти напряжения квантуются по уровню и дискретизуются по переменной τ с шагом τ n/∆t 0 . В результате формируются две последовательности
z |
|
|
(n) = z |
|
|
[[n] |
|
(∆τ * −∆t)]= K |
|
|
|
|
|
cos |
|
(∆τ * −∆t)+ Фо[n]} (2.31) |
|||
|
1 |
|
1 |
|
Ro'[[n] − (∆τ * −∆t)]* |
|
{ω |
пр |
|||||||||||
|
|
|
|
1 |
|
|
|
|
|
|
sin |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
2 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
||
Здесь параметр ∆τи=∆τ*-∆t считается фиксированным. В точке 14 выделяется огибающая |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
Ro'[n] = Z12 [n]+ Z22 [n] |
|
(2.32) |
|
|
|||||||
а в точке 15-фаза |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
[n] |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
Z2 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
ψ 0 [n]= arctg Z1 |
[n] = ωпр (∆τ * −∆t)+ Фо[n] |
(2.33) |
|||||||||
|
|
|
|
|
|
|
|
Дифференцирующая цепь (ДЦ) формирует сигнал так, что в точке 16 |
|||||||||||
|
|
|
|
|
|
|
|
получается |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dRo'[n] |
= Zввы[n] |
|
(2.34) |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
dn |
|
|
|
|
|
|
|
|
|
Это соответствует нечетной дискриминационной характеристике рис. (2.9) с нулем в точке .
∆τи=∆τ*-∆t=0.
Изменяя задержку в измерительной ЛЗ для поиска по ∆τ* можно по достижению нуля выходного эффекта в точке 16.:
|
|
|
Zвых [n]→0 |
(2.35) |
||
сформировать грубый отсчет пеленга по огибающей взаимокорреляционной функции: |
||||||
∆τ *гр [m] = |
ξ *гр |
= |
|
d |
(cosε )*гр |
(2.36) |
с |
|
c |
||||
|
|
|
|
|
||
Более точный отсчет можно получить с помощью (2.34). Например, при приеме АМ-колебания |
||||||
Фо(τ )иΨо[m] = ωпр (∆τ *[m] − ∆t) |
(2.37) |
|||||
Устанавливая с помощью измерительной линии задержки нуль функции Ψ0[m], можно получить более точный отсчет:
∆τ * [m] = |
ξ *T |
= d (cosε ) * |
(2.38) |
|
|
||||
T |
c |
c |
T |
|
|
|
|
||
В совмещения отсчетов (2.36) и (2.37) получается однозначный и точный отсчёт ξ* или (сos ε)*
Глава 3. ЭФФЕКТИВНОСТЬ СРЕДСТВ РРТР
3.1. Работа средств разведки в сложной сигнальной обстановке
Технические средства РРТР работают на основе анализа плотности радиоизлучения из координатночастотного пространства интересов разведки. Эта плотность может иметь довольно сложную структуру, особенно в подобластях, где сосредоточены РЭС полигонов, промышленных комплексов, других народнохозяйственных, военных и военно-промышленных объектов. Сложность структуры плотности излучения (иногда эта структура именуется "сложной сигнальной обстановкой") обусловливается наличием многих излучателей радиосигналов и источников побочных и непреднамеренных излучений, изменением геометрических, частотных и временных параметров излучаемых сигналов, т.е. маневрированием излучателей в пространстве интересов разведки.
Сама сложная сигнальная обстановка является, с одной стороны, предметом анализа для средств РРТР: в ее создании участвуют излучения объектов разведки. Но, с другой стороны, сложность сигнальной обстановки затрудняет средствам РРТР обнаружение и определение параметров сигналов объектов разведки на фоне неинформативных для разведки излучений. Первейшая задача РРТР состоит в слежении за динамикой изменений сигнальной обстановки, т.е. фиксации следующих сигнальных ситуаций, складывающихся в каждый момент времени в области интересов разведки.
1. В области интересов разведки не наблюдаются сигналы, имевшиеся ранее. Такая ситуация может быть признаком изменения дислокации или снятия с эксплуатации излучающих эти сигналы объектов, систем или средств.
2.В области появились новые для средства разведки, но известные ему сигналы. Естественно, что это признак появления новых излучающим объектов, систем или средств.
3.В области появились новые неизвестные ранее сигналы, что мод жег служить признаком появления новых, ранее неизвестных радиотехнической разведке объектов, систем или средств.
Решения по указанным ситуациям средство РРТР формирует на основе анализа принятого колебания, содержащего в аддитивной смеси с шумом все сосредоточенные в области интересов
разведки сигналы. Такое колебание X(t)=C(t)+n(t) (3.1)
где n(t) - шум приемника; C(t)- сигнал, представляющий собой сумму m| модулированных колебаний (парциальных сигналов),
C(t)= ∑a j C j (t); j 1: J |
(3.2) |
j |
|
Формально для фиксации ситуации любой из трех перечисленных ситуаций средству разведки по наблюдениям колебания X(t) нужно проверить гипотезу о том, содержит ли колебание X(t) все ожидаемые априори сигналы или некоторых сигналов в X(t) нет (решение по этой гипотезе фиксирует ситуации 1 и 2), против гипотезы о том, содержит ли колебание X(t) только априори ожидаемые сигналы, или в области интересов разведки есть еще сигналы, априорная информация о которых у разведчика отсутствует (подтверждение этой гипотезы фиксирует ситуацию 3).
Первая из указанных задач сводится, очевидно, к обнаружению на фоне шума и остальных сигналов каждого из парциальных сигналов Cj(t) (3.3), для которых априорная вероятность присутствия в смеси X(t) не равна нулю. |
Средство РРТР наблюдает ситуацию, обусловленную "нормальной" сигнальной обстановкой, которая предполагает выполнение требований ЭМС. В конечном итоге "нормальная" сигнальная обстановка предусматривает обеспечение ортогональности сигналов всех РЭС, совместно работающих в области интересов разведки интересов разведки РЭС, (т.е. взаимной к oртогональности парциальных сигналов С (t); j℮1 :J.
Если ортогональность нарушается, шумы неортогональности снижают качество обнаружения парциальных сигналов по сравнению с обнаружением сигналов ортогональных. Поэтому характеристики обнаружения ортогональных сигналов могут служить верхними, осторожными, пессимистическими для систем РРТР оценками доступности реальных сигналов для обнаружения.