

РАДИОЭЛЕКТРОННАЯ БОРЬБА: РАДИОРАЗВЕДКА И РАДИОПРОТИВОДЕЙСТВИЕ
.pdfСхема № 37 со средством оперативной радиотехнической разведки, имеющим приемник для поиска и захвата частоты сигнала, представлена на рис.10.10.
В схеме рис. 10.10 многократность ответной помехи создается за счет обратной связи в импульсной ЛБВ.
Специальные генераторы ложных целей создаются для РЛС со сложными сигналами (ЛЧМ, ФКМ), а также для РЛС со скачкообразно меняющейся от импульса к импульсу несущей частотой. Ниже рассматриваются некоторые из таких схем.
На рис. 10.11, а показана схема ГЛЦ № 38, отвечающая на ЛЧМ импульс.
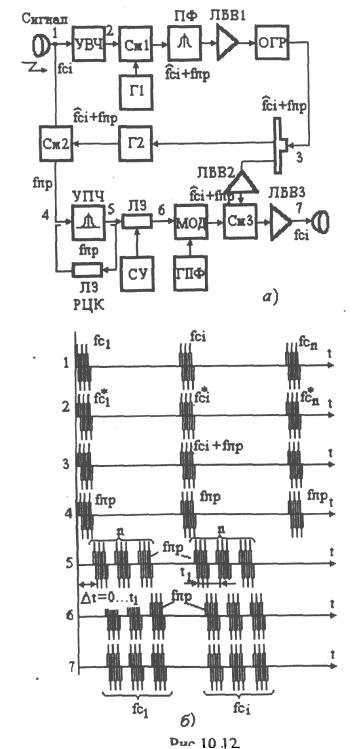
Схема снабжает излученную ответную помеху дополнительной частотной внутриимпульсной модуляции. Осциллограммы, которые иллюстрируют работу схемы, показаны на рис. 10.11,6. На выходе схемы ответная помеха в течение несжатого зондирующего импульса сигнала излучается как последовательность импульсов длительностью
∆τ = |
τ n / сж |
с периодом Тn. При этом |
|
n |
|||
|
|
несущая частота импульсной помехи равна fn(t)=fc(t)+∆fn.
Схема №39 (рис. 10.12) предназначена для создания ложных целей в зоне обзора РЛС со скачкообразной (быстрой) перестройкой частоты. Формы сигналов, с которыми работает схема, показаны на рис. 10.12.6.
Суть работы схемы - превращение сигнальных импульсов с несущей fci в импульсы постоянной промежуточной частоты (точка 4). После этого создается пачка из п импульсов ложных целей. Пачка формируется с помощью рециркулятора в цепи УПЧ. С помощью УЛЗ на At=0...ti схема управления может медленно двигать пачку с дополнительной задержкой ∆t. В точке 7 восстанавливается исходная частота fci*
Существуют схемы генераторов ложных целей для ФКМ - сигналов с быстро перестраиваемой частотой [б], но, к сожалению, для обеспечения работы этих схем необходимо априорное знание фазового кода.
Использование генераторов ложных целей в системах создания пространственно разнесенных помех будет рассмотрено ниже.
10.4. Помехи каналу дальности
Ответные имитационные помехи каналу дальности создают ложную цель, перенацеливают на нее строб дальности (система автосопровождения по дальности захватывает помеху) и уводит строб на ложную дальность. Закон, по которому помеха уводит строб дальности, может быть любым. Наиболее распространены три вида ответных импульсных помех, срывающие автоматическое сопровождения по дальности. Это однократные и многократные ответные уводящие помехи, а также ответные импульсные помехи в сочетании с шумовыми.
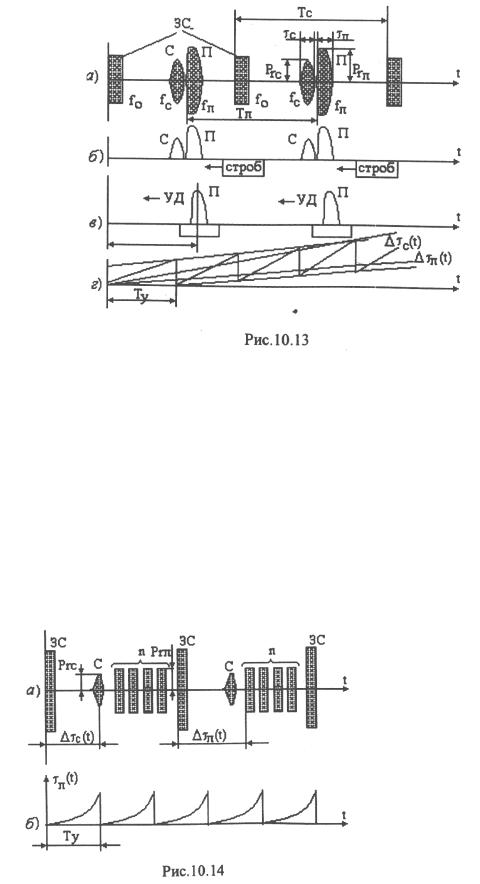
Принцип действия однократных ответных импульсных помех, уводящих по дальности, иллюстрируется рис. 10.13. В ответ на импульсы сигнала с параметрами τc, Тc, fc создаются импульсы ложной цели (рис. 10.13,а) с теми же или примерно теми же параметрами τn ≈ τc , Тп≈Тс, fn≈fc. Помеху формирует генератор ложных целей, выполненный по схемам, не отличающимся от описанных в разд. 10.3.
Мощность помехи Рm должна превышать мощность отраженного от цели сигнала Ргc. Соответствующие видеоимпульсы сигнала и
помехи представлены на рис.10.13,6. Пусть для начала система автосопровождения по дальности находится в режиме поиска, так что его строб дальности движется по оси времени справа - налево, как на рис. 10.13,6. Если помеха сильнее сигнала, строб дальности захватит более сильную помеху. Этому будет способствовать схема АРУ, благодаря которой сильная помеха подавляет слабый сигнал.
Ситуация рис.10.13,в соответствует непроизвольному перенацеливанию системы автосопровождения по дальности на помеху. После этого задержка импульса помехи ∆τn(t) изменяется и вместе с ней изменяется положение строба дальности (помехи осуществляют увод по дальности). Очень важно выбрать закон изменения этой задержки ∆τn(t). Для имитации равномерного движения ложной цели ∆τn(t) меняется по кусочно-линейному (пилообразному) закону с периодом Ту (рис. 10.13,г). Чтобы помеха имитировала медленно движущуюся цель, ∆τc(t) меняется медленно за много периодов Тc . Ту должна быть выбрана из расчета Ту>>Тс. Для имитации движения ложной цели с постоянной скоростью используют параболический закон изменения задержки ∆τn(t) =kt2. Иногда одновременно с уводом меняют мощность помехи Pn(t), имитируя изменение интенсивности сигнала по мере его приближения к РЛС или удаления от РЛС.
Для создания многократных ответных импульсных помех, уводящих по дальности, в ответ на каждый импульс сигнала излучается пачка в п импульсов с периодом Т„ (рис.10.14,д). При этом вся пачка синхронно уводится по пилообразному закону (рис. 10.14,6). Здесь при выполнении тех же условий Pm>>Prc. Система автосопровождения по дальности захватывает один из n импульсов и следит за перемещающейся пачкой.
Ответные импульсные и шумовые помехи накрывают импульс сигнала (рис.10.15,а). Если ∆τn≈∆τc (рис. 10.15,6), строб дальности не увидит сигнального импульса, так как он замаскирован шумовым импульсом помехи. Совершенно очевидно, что здесь тоже нужен такой закон увода по задержке ∆τn(t), чтобы все время накрывать движущийся импульс сигнала.
Следует отметить, что ответная импульсная помеха может быть создана только с некоторой задержкой ∆τ до 0,15 мкс относительно импульса сигнала. Поэтому для надежного накрытия маскируемого импульса сигнала ответный шумовой импульс должен упреждать его по времени. Для этого шумовой импульс, сформированный в ответ на принятый импульс сигнала РЛС, должен задерживаться на время несколько меньшее периода повторения зондирующего сигнала. Такой импульс надежно накроет следующий импульс сигнала. Поэтому все ответные импульсные помехи, комплексируемые с накрывающими шумовыми импульсами, плохо работают против РЛС с быстрой перестройкой несущей частоты от импульса к импульсу и с переменной частотой повторения запросных импульсов.
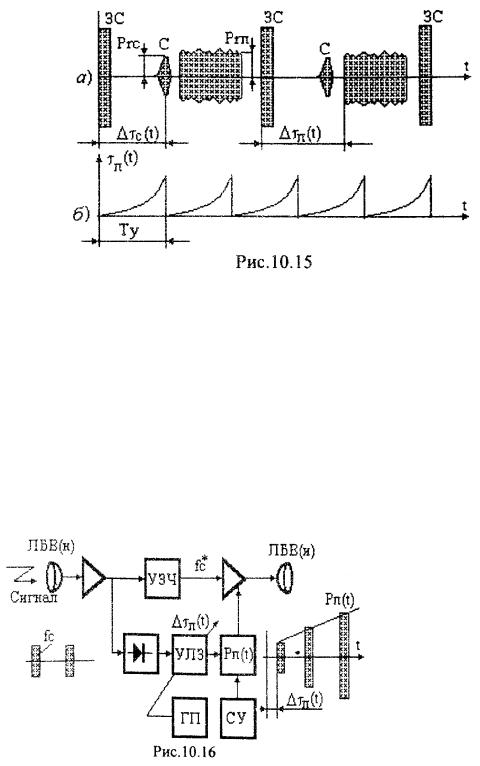
Классическая схема № 40 формирования таких ответных импульсных помех для увода систем
автосопровождения |
по дальности |
||
без преобразования |
|
частоты |
|
приведена |
на рис. 10.16. |
|
|
В соответствии с этой схемой |
|||
перестраиваемая линия |
задержки |
||
∆τn(t) управляется генератором пилы линейно изменяющегося напряжения (ГП). Затем с помощью управляемого усилителя меняется Pn(t). Устройство запоминания частоты оценивает несущую сигнала fc* и создает
условия для излучения задержанного импульса на той же несущей fc, что и у принятого импульса. В схеме рис. 10.16 можно избежать необходимости запоминания высокой несущей частоты принятого сигнала в устройстве УЗЧ. Пусть зондирующий сигнал описывается обычной моделью
. |
|
|
|
uo (t) = Re E(t) exp( jω0t) ; |
|||
|
|
|
|
. |
− jϕ0 |
(t ) |
|
E 0 (t) = E 0 (t)e |
|||
|
|
||
Тогда помеха, создаваемая схемой в схеме рис. 10.16, может быть представлена в виде
u |
|
(t)= |
P (t)u |
|
[t − ∆τ |
|
. |
|
t |
|
|
||
П |
0 |
П |
(t)]= Re E П (t) exp jω |
, где |
|||||||||
|
|
|
П |
|
|
|
0 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
(t)= |
. |
(t)u0 |
[t |
− ∆τ П (t)]{exp− jω0 ∆τ П (t)} |
PП (t) |
|
|||||
E П |
E 0 |
(10.9) |
|||||||||||
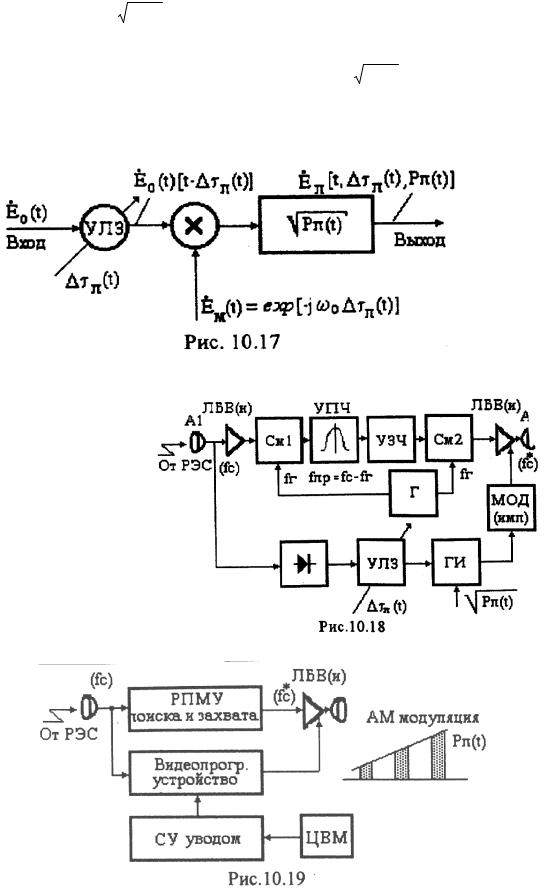
Эквивалентная схема формирования помехи в соответствии с уравнением (10.9) представлена на рис. 10.17.
На рис. 10.18 представлена схема № 41 формирования ответных импульсных помех для увода
по |
дальности |
|
с |
запоминанием |
сигнала |
на |
|
промежуточной |
частоте |
и |
|
двойным гетеродинированием.
|
В ряде случаев в схеме |
|
рис. |
10.18 |
устройство |
запоминанием |
сигнала |
|
частоты выполняется вместе с приемником поиска и захвата частоты сигнала, а нижняя цепь - видеопрограммным устройством рис. 10.19, управляемым по программе от ЦВМ.
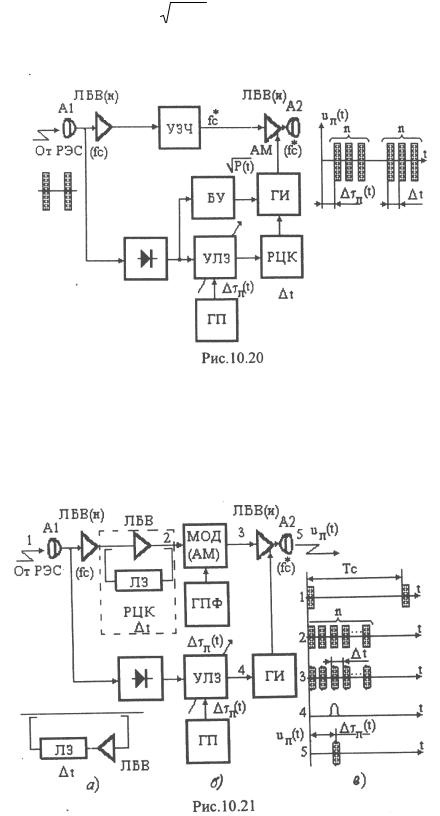
На рис. 10.20 представлена классическая схема № 43 с рециркулятором в побочной цепи. Этот рециркулятор размножает ответные импульсы, повторяя принятый запросный импульс с периодом Д1 Управляемая линия задержки создает увод пачки ответных импульсов. Блок управления (БУ)
формирует модулирующую функцию PП (t) . Генератор импульсов (ГИ) создает импульсы
многократной помехи по дальности. Эти импульсы модулируют по амплитуде колебание, усиливаемое выходной импульсной ЛБВ(И).
Схема № 44 на рис. 10.21,а имеет рециркулятор в прямой цепи. Как показано на осциллограммах рис. 10.21,6, схема создает один i-й ответный импульс (т.5), выбирая его из пачки в n импульсов. Этот ответный импульс будет передвигаться скачком с шагом ∆t. Рециркулятор можно включить по-иному (рис. 10.21,а). Схему формирования многократных ответных импульсных помех для увода по дальности можно создать на основе схем генераторов ложных целей (рис. 10.5, 10.8, 10.9), если в цепи обратной связи использовать управляемую линию задержки.
Схемы формирования многократных ответных импульсных помех также можно свести к модели рис. 10.17 с другой модулирующей функцией Eм(t), формируемой из п моделей с функциями вида exp[- jω0i∆t], i 1,n.
Основной схемой в классе формирователей ответных импульсных помех с шумовой помехой является схема 8.14. Если надо организовать увод по дальности, в цепь обратной связи надо добавить управляемую линию задержки. Если применить рециркулятор, можно получить многократную помеху с уводом всей пачки.
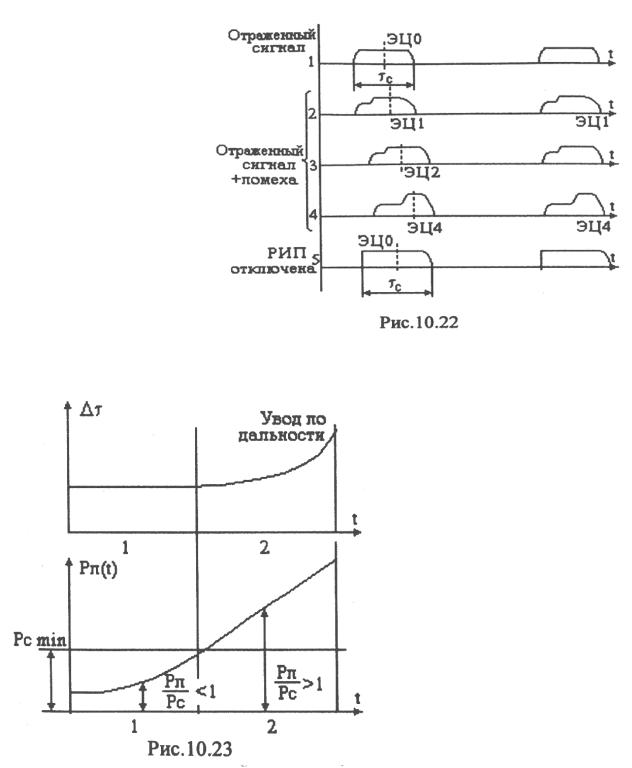
Существуют уводящие (в пределах длительности импульса сигнала τc (рис. 10.22)) помехи за счет смещения энергетического центра (ЭЦ) суммарного импульса сигнала и помехи. Так, например, на рис. 10.22 на осциллограммах 2... 4 показаны три импульса помехи с интервалом 0,25с при периоде увода Ту=1с. При действии несимметричных импульсов помехи система автосопровождения по дальности, отслеживая энергетический центр импульса (ЭЦ на рис. 10.22), будет смещать строб дальности в малых пределах τc/2
Впринципе можно сделать многоканальные станции активных помех с уводом по дальности, где каждый канал уводится по своему закону. Для этого в классических увода по дальности схемах нужна п- канальная управляемая линия задержки и сумматоры на выходе.
Всистемах автосопровождения по дальности часто применяется схема помехозащиты, работа которой основана на том, что при одновременном наблюдении нескольких сигналов захватывается самый слабый из них тот, у которого
Pc=min. Для противодействия в условиях такой помехозащиты эффективна уводящая помеха со специальным законом изменения Pn(t) (рис. 10.23).
На участке 1, где нет увода, помеха имитирует цель, выставляя импульс с уровнем
PП / Pcmin< 1. Тогда в системе автосопровождения по дальности со
схемой помехоэащиты с селекцией минимального сигнала произойдет захват помехи (как самой слабой из всех одновременно наблюдаемых импульсов). По мере увода строб дальности смещается на участок 2, где PП(t)/Pc > 1. Но система автосопровождёния по дальности все равно следит за помехой, а не за сигналом.
В ряде станций активных помех с уводом по дальности применяется перенацеливание на дополнительную ложную цель. Для этого помеха срывает автосопровождение сигнала и смещает строб в сторону ложной цели, сигнал от которого и захватывается системой автосопровождения по дальности.
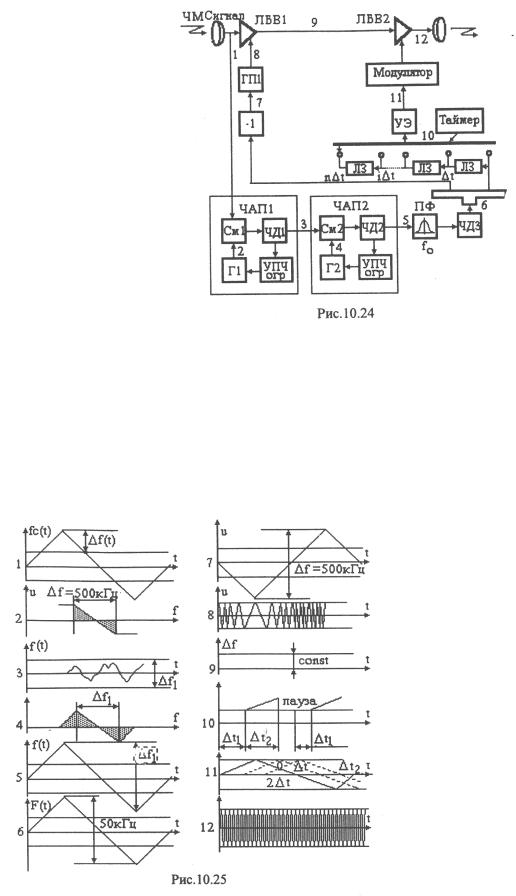
На рис. 10.24 представлена схема №45 уводящей по дальности помехи против радиолокаторов и радиовысотомеров с непрерывной ЧМ.
Виды сигналов в этой схеме
приведены |
на рис. 10.25. Пусть на |
вход станции |
формирования активных |
помех поступает непрерывный ЧМсигнал с треугольным законом изменения fc(t) частоты. Две последова-
тельные петли ЧАП отслеживают |
закон |
fc(t) сначала в широкой |
полосе |
∆f=500Mru, а затем в более узкой полосе ∆fi ≈50 кГц (точки 2... 5). В результате в точке 5 возникает ЧМ-колебание с размахом частоты ∆f1. Частотный детектор 3 в точке 6 формирует напряжение треугольного вида в такт с
изменением fc(t), но в полосе ∆f1. Инвертор по фазе и устройство управления частотой создают противофазное треугольное напряжение (точка 7), но в полосе ∆f=500 МГц. Генератор пилообразного напряжения (точка 8), меняя крутизну пилы, управляет в ЛБВ-1 в противофазе частотой сигнала. В результате в точке 9 получается напряжение с постоянной частотой.
Вторая цепь в схеме рис. 10.24 создает ЧМ-колебание с уводом по дальности, для чего многосекционная линия задержки создает сдвинутые с шагом ∆t треугольные напряжения (точка 11), которые посредством устройства управления частотой и генератора пилообразного напряжения создают в ЛБВ-2 ЧМ - колебания, частота которых соответствует ложной дальности (ложной задержки по времени). Таким образом ответная имитационная помеха дезинформирует РЛС относительно истинной величины задержки.
10.5. Помехи каналу скорости
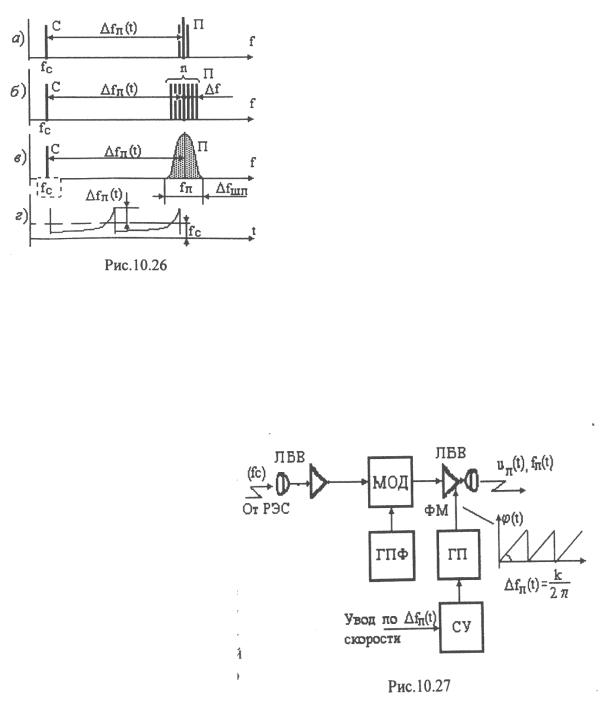
Эти помехи во всем аналогичны помехам каналу дальности. Но при формировании помех производится управление не временными задержками, а сдвигами частоты. Аналогично помехам, уводящим по дальности, существуют их аналоги для увод по скорости: многократная помеха скорости (МПС) и доплеровский шум (ДЩ). Принцип действия наиболее распространенных помех каналам измерения и сопровождения скорости иллюстрируется рис. 10.26. На рис.10.26,а воспроизведена помеха, уводящая по скорости.
Здесь помеха имеет спектр, несколько расширенный по сравнению со спектром сигнала. Разность частот fn(t)-fc=∆. Частота fп(t) меняется, для примера, по параболическому закону рис.10.26,г. На
рис. 10.26,6 приведена многократная помеха по скорости. Эта помеха представляет собой пачку спектральных гармоник с синхронным изменением частот всех составляющих пачки. Наконец, на рис.10.2б,в показана случайная помеха, имеющая расширенный шумовой спектр. Центральная частота которого также может уводиться по закону fп(t).
Для увода по скорости чаще всего применяют схему № 46 с фазовой модуляцией ЛБВ (рис.
10.27).
В соответствии с этой схемой с помощью генератора линейно изменяющегося (пилообразного) напряжения производится фазовая модуляция колебания на выходе ЛБВ ϕ(t)=kt. Такому сдвигу по фазе соответствует частотный сдвиг усиливаемого сигнала:
fп (t) = |
dϕ(t) |
= |
k |
|
dt |
2π |
|||
|
|
|||
(10.10) |
|
|
||
Меняя от системы управления крутизну пилообразного напряжения к, можно получить увод по скорости как вперед (∆fn растет), так и назад (∆fn уменьшается со временем).
Нетрудно получить модель и эквивалентную схему устройства формирования уводящей по скорости
помехи. Если uc (t) = |
|
, |
|
|
|
|
|
|
|
Re E 0 (t) exp( jω0t) - пришедший сигнал, то помеха может быть представлена как |
|||||||||
|
|
|
|
|
|
|
|
|
|
uП |
|
, |
(t) exp[ j(ω0 |
+ ∆ω П |
|
, |
, |
jω |
t |
(t) = k Re E 0 |
(t)) |
= E 0 (t) E М (t)e |
0 |
|
|||||
|
|
|
|
|
|
|
|
|
|
Такой аналитической модели соответствует эквивалентная схема устройства формирования помехи рис.
10.28.
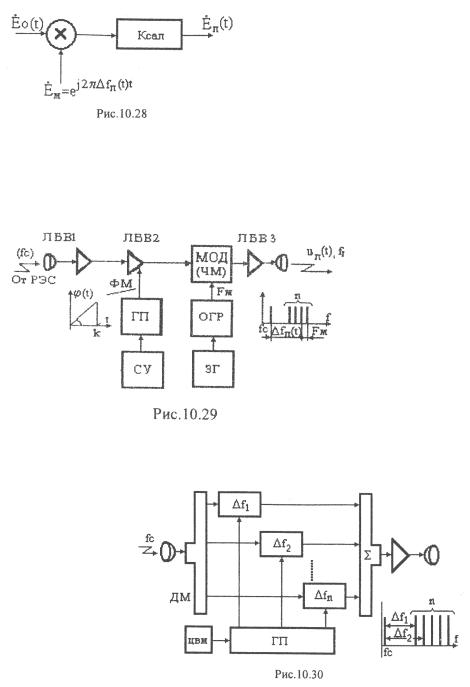
Схема рис. 10.27 может работать на любых (не только гармонических) сигналах, в частности ЛЧМ, ФКМ сигналах. Если надо создавать паузы в помеховых излучениях, то в схему рис. 10.27 добавляют электронные ключи и коммутаторы для прерывания работы станции формирования активных помех.
Существует несколько методов создания многократных помех, уводящих по скорости.
На рис. 10.29 показана подобная схема № 47. Здесь в ЛБВ 2 с помощью генератора пилообразного напряжения и фазовой модуляции частота сигнала сдвигается и уводится по закону ∆fп(t)=k(t)/2π.
В модуляторе производится ЧМ-модуляция помехового сигнала колебанием с частотой Fм. Такая модуляция создает колебание со спектром, содержащим набор из n гармоник. Частоты этих гармонических составляющих
отличаются на iFм, i=l:n, т.е. помеха - это сетка частот с шагом Fм. Ограничитель выравнивает интенсивность гармонических составляющих.
Схема формирования активных помех по скорости № 48 показана на рис. 10.30. Здесь многоканальная схема создания частотных сдвигов ∆f1 , ∆f2... ∆fn управляется от многоканального генератора пилообразного напряжения. Каждое из этих напряжений имеет крутизну, соответственно ki,k2...kn. Генератор управляется по программе от вычислителя (ЦВМ). Здесь же в ЦВМ может храниться программа или формироваться закон изменения
частотных сдвигов для синхронного увода пачки.
Типовая схема №49 формирования помехи случайной уводящей помехи каналу скорости представлена на рис. 10.31.
В соответствии со схемой рис. 10.31 в модуляторе происходит АМ/ФМ модуляция видеошумом. Увод по частоте ∆fn (t) происходит в ЛБВ с помощью фазовой модуляции по закону ϕ(t)=k(t)t, т.е. по пилообразному закону с изменяющейся крутизной k(t)=2π∆fnt. Помеха на выходе в ответ на сигнал uo(t)
= Re[Eo(t) exp(jω0t)] имеет вид