

РАДИОЭЛЕКТРОННАЯ БОРЬБА: РАДИОРАЗВЕДКА И РАДИОПРОТИВОДЕЙСТВИЕ
.pdfДля панорамных приемников с быстрой перестройкой частоты существует взаимосвязь между полосой пропускания резонансной системы и скоростью перестройки; увеличение скорости перестройки ведет к ухудшению разрешающей способности и снижению чувствительности. Действительно, оптимальная полоса пропускания ∆f и длительность τ отклика приемника на сигнал в результате быстрой перестройки связаны примерным соотношением ∆f~(τ)-1 При скорости перестройки частоты df/dt
длительность отклика приемника будет, очевидно, равна τ =∆f( dfdt )-1. Отсюда следует, что
∆f~ |
df |
(1.1) |
|
dt |
|||
|
|
Таким образом, каждой скорости перестройки соответствует своя оптимальная полоса (разрешающая способность по частоте) ∆f .Сокращая время поиска, можно проиграть в разрешающей способности и, наоборот, увеличивая ∆f, одновременно нужно увеличивать время разведки.
Если скорость перестройки такова, что Тн <τн, мощность импульса на выходе приемника будет меньше мощности входного сигнала, т. е. приемник потеряет чувствительность. Потеря может оцениваться в соответствии с соотношением [2]:
а ≈[1+0.2( |
df |
( |
1 |
)2) -4 ] |
(1.2) |
dt |
∆ f |
где а - потеря чувствительности относительно приемника с нулевой скоростью перестройки по частоте (в децибелах).
Эффект потери чувствительности перестраиваемого по частоте приемника называется динамическим эффектом [2]. Для уменьшения динамического эффекта необходимо при неизменной скорости перестройки df7dt увеличивать полосу пропускания ∆f резонансной системы, но это, в свою очередь, ведет к уменьшению чувствительности приемника. Одновременное обеспечение замечательной скорости перестройки и высокой разрешающей способности по частоте успешно может быть достигнуто
в приемнике со сжатием импульсов [2]. Здесь, по сути дела, используется тот же принцип |
увеличения |
разрешающей способности, что и в широкополосных РЛС с расширением спектра. |
|
На рис. 1.5 изображена временная диаграмма импульсов на выходе УПЧ, |
поясняющая |
возможность улучшения разрешающей способности по частоте в приемнике со сжатием импульсов.
Если на разведывательный приемник воздействуют два непрерывных сигнала с различными частотами fi и f2, то в результате перестройки гетеродина на выходе УПЧ с полосой пропускания ∆f формируются импульсы с внутренней частотной модуляцией. При суммировании этих импульсов в УПЧ обычного панорамного приемника образуется один импульс большей дли-
тельности. Такие импульсы разрешить невозможно. В приемнике со сжатием импульсов сигналы с выхода УПЧ поступают на фильтр, выполненный на основе дисперсионной линии задержки. В результате импульсы становятся короче по длительности, не накладываются друг на друга и наблюдаются раздельно.
Используемые для РРТР сканирующие панорамные приемники перестраиваются со скоростью (20...30) частотных каналов в секунду при полосе каждого канала ∆f в пределах от (50...500)
Гц до (50... 1000) кГц [8].
Противоречие между скоростью перестройки по частоте, которую для повышения оперативности разведки нужно выбирать как можно большей, и разрешающей способностью ∆f устраняется в многоканальном приемнике РРТР (рис. 1.6).
Параллельные узкополосные |
фильтры (УПЧ) на выходе смесителя перекрывают своими |
полосами пропускания весь частотный диапазон, как на рис. 1.7. |
|
При такой схеме построения |
приемник позволяет раздельно наблюдать (разрешать по |
частоте) сигналы РЭС, если только разнос рабочих частот этих РЭС не меньше ∆f. В разведываемом диапазоне шириной δf нужно разместить
N= |
df |
+1 |
(1.3) |
dt |
параллельных фильтров.
Время разведки не может быть меньше времени установления переходных процессов в
каждом фильтре. Для N-канального приемника (рис. 1.6) |
это время составит |
|||
Τ ≈ |
2...3 |
|
(1.4) |
|
∆f |
||||
|
|
|||
т. е. в N раз меньше времени обзора полосы δf сканирующим приемником. Платой за увеличение оперативности является пропорциональное (тоже в N раз) усложнение аппаратуры.

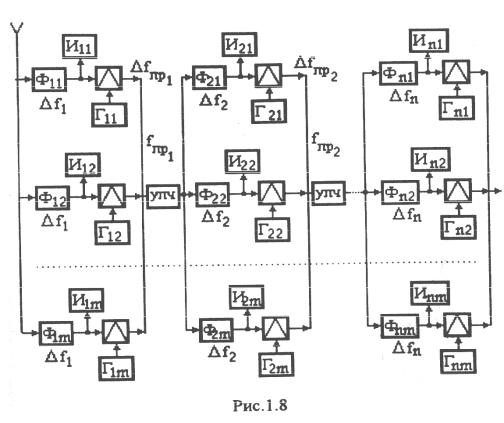
Возможны и применяются схемы, соединяющие преимущества матричных и многоканальных приемников. Это матричные приемники [2]. Блок-схема матричного приемника изображена на рис. 1.8.
Матричный приемник содержит набор элементарных ячеек, состоящих из фильтров Фij
индикаторов Иij, гетеродинов Гij и смесителей. Ячейки располагаются по m строкам i l:m и n столбцам
j l:.n. Фильтры первого столбца разбивают разведываемый диапазон частот δf на m равных полос ∆fпр1:
∆fпр1=δf/m |
(1.5) |
Все сигналы с выходов этих фильтров гетеродинируются на одну и ту же промежуточную частоту fпр1. Таким образом входной диапазон шириной δf сворачивается в m раз более узкую полосу ∆fпр1. Второй столбец трансформирует процесс из полосы ∆fпр1 в полосу ∆fпр2:
∆fпр2=∆fпр1/m=δf/m2 |
(1.6) |
И так далее, в последнем n-ом столбце сигнал наблюдается в полосе фильтра ∆fпрn :
∆fпрn=δf/mn |
(1.7) |
Таким образом, приемник обеспечивает разрешение по частоте ∆f=δf/mn при использовании mn фильтров, тогда как чисто многоканальный приемник для такого же разрешения потребовал бы mn>mn фильтров.
Для обнаружения сигнала и указания его частоты служат индикаторы Иij. Срабатывание индикатора означает обнаружение сигнала на частоте соответствующего фильтра, в его полосе.
Совершенствование элементной базы радиоэлектронной аппаратуры, а также методов и алгоритмов обработки сигнала позволяет в настоящее время решить многие задачи РРТР при помощи цифровых приемников [10].
В цифровых приемниках сигналы в широкой полосе (в предельном случае - во всей полосе разведки δf) с выхода УПЧ преобразуются в цифровую форму и дальше обрабатываются (фильтруются, обнаруживаются, демодулируются ) при помощи алгоритмов, реализуемых специальными цифровыми сигнальными процессорами. Преимущества цифровых методов обработки общеизвестны. Это высокая точность и стабильность характеристик аппаратуры, возможность запоминания, хранения и воспроизведение сигнала, что очень важно для систем непосредственной РТР поддержки РЭП. Но у цифровых методов имеются и недостатки. Так, ширина частотного диапазона разведки ограничивается быстродействием цифровых схем. Цифровая обработка сопровождается дополнительными погрешностями, обусловленными шумами вычислений, аналого-цифровыми и цифроаналоговыми преобразованиями.
Аналого-пифровое преобразование, необходимое при переходе к цифровой обработке, предусматривает дискретизацию сигнала по времени и квантование по уровню. Подвергающийся преобразованию входной сигнал s(t) - это аддитивная смесь сигналов разведываемых РЭС, сигналов неинформативных для разведки излучений и помех - прежде всего собственных тепловых шумов приемника s(t). Используя известное представление процесса s(t) в виде огибающей и фазы или через две
квадратурные компоненты [11], можно получить |
|
s(t)=S(t)cos[ω0t-ϕ(t)]=X(t)cos ω0t +Y(t)sinω0t , |
(1.8) |
где S(t) и ϕ (t) - соответственно огибающая и фаза процесса s(t), X(t)=s(t)cosω0t, а У(t)=s(t)sinω0t - квадратурные компоненты, однозначно связанные с огибающей и фазой соотношениями
S(t)= X (t) * X (t) + Y (t) *Y (t) ; ϕ (t)=arctgY(t)/X(t) |
(1.9) |
Из соотношений (1.8) и (1.9) следует, что процесс на выходе линейной части разведывательного приемника однозначно определяется парами процессов: огибающей и фазой {S(t) и ϕ(t) } или квадратурными компонентами {X(t) и Y(t)}.
Поэтому для такого преобразования процесса s(t) в цифровую форму, которое сохраняет всю информацию о нем, достаточно сформировать цифровые выборки двух процессов, т. е. либо огибающей и фазы, либо квадратурных компонент.
Цифровая обработка разведываемого сигнала позволяет применить процедуру вычисления дискретного преобразования Фурье для реализации многоканального приемника. Действительно, для вычисления преобразования Фурье сигнала s(t), наблюдаемого на интервале времени t [-T/2;T/2]:
T / 2 |
|
S(ω) = ∫s(t) exp{− jωt}dt |
(1.10) |
−T / 2
нужно диапазон частот 2πδf [ωmin; ωmax] разбить на N интервалов шириной 2π∆f=(ωmax-ωmin)/N, таких, что ∆f>=1/T и в точках, ωn=n∆πf, n l:N вычислить
T / 2 |
T / 2 |
T / 2 |
|
S(ωn ) = ∫s(t)exp{− jωnt}dt = |
∫s(t) cos{ωnt}dt − j |
∫s(t)sin{ωnt}dt , |
(1.11) |
−T / 2 |
−T / 2 |
−T / 2 |
|
где S(ωn) - значение спектральной плотности амплитуд сигнала на частотах ωn.
Если сигнал представляет собой синусоиду с амплитудой ac и частотой ω [ωmin,ωmax], из (1.11) можно найти
S(ωn)=(2ac/|ω-ωn|T)*sin|(ω-ωn)T/2| (1.12)
Т.е. величина S(ωn)( равна ac при ω-ωn и убывает с увеличением модуля расстройки Ω=|ω-ωn | как
[sin(ΩT/2)]/ (ΩT/2). Зависимость
K (ω-ωn)= [sin|(ω-ωn)T/2]|/|[(ω-ωn)T/2|] |
(1.13) |
можно считать эквивалентом частотной характеристики некоторого фильтра, настроенного на частоту ωn. Процедура вычисления преобразования Фурье в N дискретных по частоте точках эквивалентно преобразованию сигнала в N параллельных фильтрах. Кстати, считая полосой пропускания каждого фильтра частотный интервал между ближайшими точками обращения в нуль величины K(Ω), из (1.13) можно определить
∆Ω=2π/Τ |
(1.14) |
Самая распространенная |
вычислительная процедура вычисления (1.12)- алгоритм быстрого |
преобразования Фурье (БПФ).
Анализатор параметров принимаемого сигнала служит для обнаружения и опознавания образа разведываемого радиоэлектронного средства. Анализатор также демодулирует сигнал, определяет вид и индекс модуляции, характеристики модулирующей функции. Естественно, что исходная информация для опознавания сигнала содержится в значениях его параметров.
Анализаторы характеризуются количеством учитываемых при обработке параметров сигнала, количеством обрабатываемых сигналов за единицу времени (пропускной способностью).
Измеритель служит для оценивания параметров разведываемых сигналов. При этом различают временные, пространственные, поляризационные, спектральные и энергетические параметры принимаемых сигналов. Временные параметры сигналов - это частоты и длительности сигналов и их элементов, временные интервалы между сигнальными импульсами; параметры модулирующей функции. К спектральным параметрам сигналов относятся высокочастотный спектр и спектр огибающей сигнала. Энергетические характеристики принимаемого сигнала - это мощность и спектральная плотность. Пространственные параметры сигнала - координаты точки излучения (координаты объекта разведки) и характеристики направленности излучения его антенн. Поляризационные параметры характеризуют ориентацию вектора электрического поля излучения объекта разведки.
1.2. Измерение частоты сигнала средствами РРТР
Измерение и запоминание несущей частоты разведываемого радиоэлектронного устройства являются одной из наиболее важных функций станции РРТР. Специфичность методов определения и запоминания несущей частоты средствами радио- и радиотехнической разведки обусловлена, с одной стороны, ограниченностью времени разведки и, с другой стороны, широким диапазоном разведуемых частот.

Несущая частота - один из главных, весьма информативных для РРТР, параметров сигнала объекта разведки. Условно способы определения частоты можно разделить на фильтровые, дискриминаторные, интерференционные, корреляционные и цифровые.
Определение частоты при помощи фильтров сводится к поиску и указанию фильтра, настроенного на сигнал (точнее, того фильтра, в полосе которого обнаруживается сигнал). В панорамных приемниках с последовательным анализом разведываемого диапазона на все частоты в разведываемом диапазоне последовательно настраивается один и тот же фильтр. Поэтому определение частоты сводится к определению момента времени, в который частота настройки этого фильтра совпадает с частотой сигнала. В многоканальных приемниках с параллельным спектральным анализом разведываемого диапазона для определения частоты сигнала достаточно указать номер фильтра, в полосе которого обнаружен сигнал. То же справедливо и для указанных выше схем модификаций способов многоканального приема: для матричного приемника и приемника с цифровым спектральным анализом.
Во всех случаях измерения при помощи фильтра максимальная ошибка определения частоты составляет половину ширины полосы пропускания фильтра, т. е. половину интервала разрешения
δfc<=∆f/2 |
(1.15) |
Если нужно сохранить постоянной относительную ошибку измерения частоты δfc/fc=const в большом диапазоне разведки, нужно применять фильтры с переменной полосой пропускания, т.е. фильтры с одинаковой для всех частот добротностью.
Частотные дискриминаторы преобразуют отклонения частоты сигнала от некоторого известного значения в напряжение, пропорциональное величине и знаку этого отклонения. Работа устройства дискриминаторного измерения частоты иллюстрируется структурной схемой (рис. 1.9).
В соответствии с этой структурной схемой принятый сигнал усиливается в широкополосном усилителе и подается на частотный дискриминатор, содержащий два фильтра Ф1 и Ф2, несколько расстроенных от частоты fcp. Разность значений огибающих сигналов на выходах фильтров Uвых зависит от частоты, как показано на графике рис. 1.9, т. е. частотный дискриминатор преобразует частоту входного наблюдаемого сигнала в напряжение на выходе. Это напряжение подается на индикатор приемника РРТР.
Приемники с частотными дискриминаторами способны определять частоту разведываемого сигнала в широком диапазоне и с относительно высокой точностью ( 1%) [2].
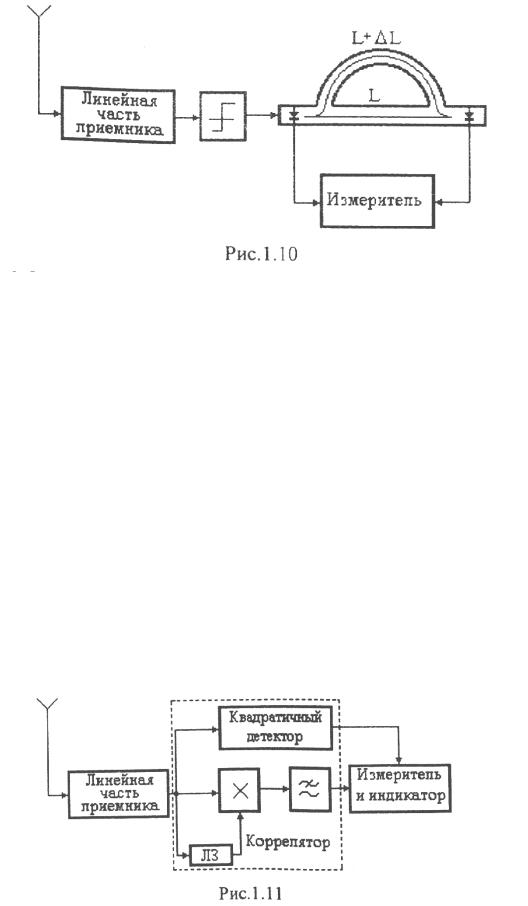
Принцип интерференционного измерения частоты в приемниках РРТР иллюстрируется функциональной схемой (рис. 1.10).
Принятый и усиленный сигнал подается на двухканальную фидерную линию. Такая линия обладает некоторыми дисперсионными свойствами: фaза и амплитуда и выходного сигнала линии зависит от частоты. Действительно, разность электрических длин двух каналов (рис. 1.10) распространения сигнала ∆L приводит к тому, что фазы двух этих сигналов будут различаться:
∆ϕ=ω∆L/Vф |
(1.16) |
где Vф - фазовая скорость распространения электромагнитной волны в фидерной линии. |
|
Амплитуда суммы двух синусоид, сдвинутых по фазе на ∆ϕ, будет связана, хотя и нелинейно, с |
|
частотой сигнала: |
|
Uвых=kUcos(ω∆L/2Vф) |
(1.17) |
где k - постоянный коэффициент, a U - амплитуда сигнала.
Как следует из (1.17), детектируя выходной сигнал и измеряя амплитуду, можно определить его частоту. Поскольку напряжение Uвых зависит, кроме частоты, еще и от амплитуды входного сигнала, требуется его нормировка. Для этого используется ограничитель на входе двухканального фидерного устройства и, кроме того, в измерителе организуется схема автоматической регулировки усиления по амплитуде входного сигнала.
К достоинствам измерителя относится возможность практически мгновенного измерения частоты разведываемого сигнала. К недостаткам--невозможность определения частоты при одновременном наблюдении нескольких сигналов, а также сравнительно небольшой диапазон однознчного измерения. Последнее свойство обусловлено неоднозначнстью зависимости функции cos(ω∆L/2Vф) аргумента.
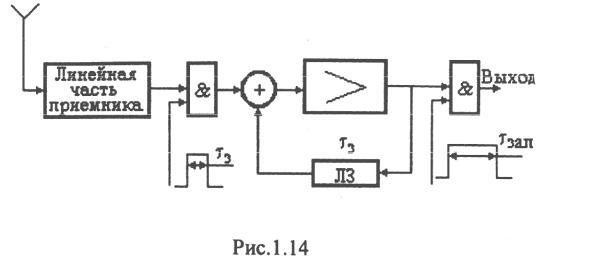
Корреляционные измерители несущей частоты строятся по схеме рис. 1.11.

Сигнал с выхода широкополосного усилителя подается на перемножитель вместе со своей копией, задержанной в линии задержки (ЛЗ). Усредненное фильтром нижних частот напряжение с выхода перемножителя пропорционально значению автокорреляционной функции входного процесса для аргумента τ=τ3.
Задержка входного разведываемого сигнала на τ3 эквивалентна сдвигу его фазы на ϕ=ωτ3. Перемножение прямого и задержанного сигнала дает (с точностью до быстропеременной составляющей,
усредняемой фильтром нижних частот) на выходе коррелятора |
|
Uвых=k(a2/2)*cosωτ3 |
(1.18) |
где k - коэффициент пропорциональности; а - амплитуда входного сигнала.
Как следует из (1.18), выходное напряжение коррелятора зависит от частоты сигнала ω, а также от его мощности a2. Зависимость от частоты! используется измерителем, а зависимость от мощности компенсируется за счет сигнала с выхода квадратичного детектора.
Как и интерференционный, измеритель корреляционный обеспечивает однозначные измерения только в пределах одной октавы, т. е. диапазона, для которого отношение верхней и нижней частот равно
2.
Цифровые способы измерения частоты обеспечивают высокую, точность и хорошо сопрягаются с вычислительными устройствами последующей обработки сигнала. Для измерения частоты применяют схемы, реализующие различные модификации двух основных методов. Это методы цифрового частотомера и цифрового периодомера. Работа цифрового частотомера иллюстрируется схемой рис. 1.12.
Входной формирователь создает узкие импульсы в моменты перехода сигнала через нулевой уровень снизу-
вверх (с положительной производной). Эти импульсы через схему совпадений, открываемую стробом на
время измерения Тизм , попадают на счетчик. Результат подсчета числа импульсов за время Тизм выводятся в качестве оценки частоты
F*=N/ Тизм |
(1.19) |
где N - число в счетчике.Ошибка дискрета измерений по методу частотомера соответствует ошибке в один счетный импульс, т. е. один период входного сигнала за время измерения:
∆F=1/ Тстр |
(1.20) |
при Тизм =1с, ∆F =1Гц.
Для уменьшения ошибки дискрета цифрового измерения частоты используют метод периодомера. Основная схема измерения по этому методу представлена на рис.1.13. Периодомер подсчитывает число импульсов частоты fcч>>fc за время Tсч=nTc=n/fc, N=fсчТсч=n(fc /fc) а частота сигнала может быть оценена как
|
|
fc=fcчn/N |
|
|
(1.21) |
|
||
Ошибка дискрета в один счетный импульс ∆N=1 (один период колебаний частоты fcч) |
||||||||
соответствует ошибке в оценивании частоты: |
|
|
|
|
|
|
||
∆f |
=f |
n/N2=(1/n)(f 2/f |
c |
)=(1/T |
)( f /f |
c |
) |
(1.22) |
c |
cч |
c |
|
изм c |
|
|
||
Ошибка дискрета тем меньше, чем больше fcч по сравнению с fc.
Аналогичные схемы применяются средствами РТР для определения параметров импульсных сигналов РЛС и систем передачи информации. Основные параметры импульсных последовательностей: длительности им пульсов и периоды (или частоты) повторения.
Результаты измерения частоты нужно запоминать. В зависимости oт задач, решаемых средством РРТР, различают кратковременные и долговременные способы запоминания частоты.
Кратковременные способы запоминания - это запоминание на время, необходимое для настройки передатчика помех, т. е. кратковременное запоминание используется системами разведки для оперативной поддержки РЭП. Одна из самых распространенных схем кратковременного запоминания частоты - управляемый рециркулятор (рис. 1.14).
Из сигнала с выхода приемника ключом & вырезается прямоугольный импульс длительностью τ3. Этот импульс усиливается и подается на выходной ключ и на линию задержки. Задержанный на τ3 импульс снова подается на вход усилителя. Этот импульс начинается в момент окончания предыдущего импульса. До тех пор, пока открыт выходной ключ, на выходе будет существовать последовательность вплотную примыкающих друг к другу радиоимпульсов частоты сигнала. Основным условием поддержания незатухающих колебаний на выходе является баланс амплитуд: коэффициент усиления по петле рециркуляции, содержащей усилитель, линию задержки, сумматор и ответвитель сигнала в цепь обратной связи, должен быть не меньше единицы. При очевидной простоте построения схема запоминания с рециркулятором имеет существенный недостаток: выходной сигнал не сохраняет когерентность входному, поскольку в моменты коммутации происходит разрыв фазы.
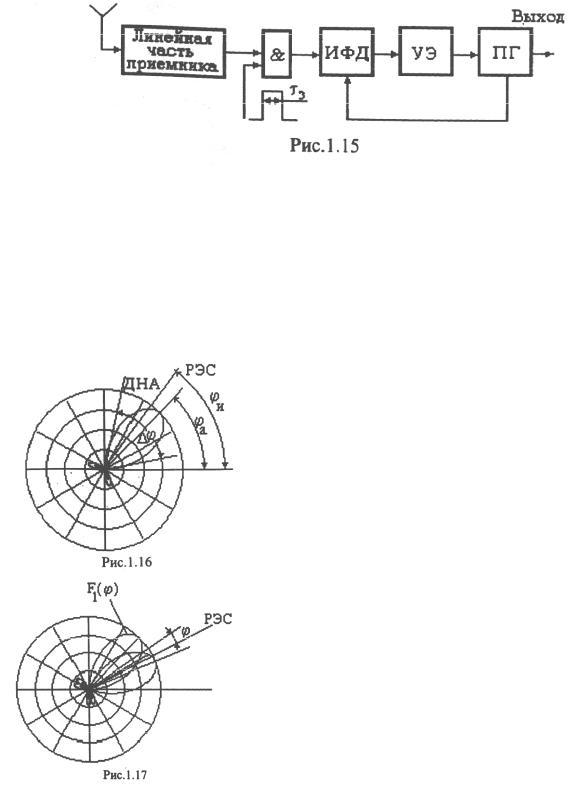
Другой способ запоминания частоты предусматривает синхронизацию подстраиваемого генератора (рис. 1.15).
Сигнал с выхода приемника стробируется ключом & и подается на импульсно-фазовый детектор, формирующий за время τ3 напряжение, пропорциональное разности фаз, и запоминающий это напряжение после окончания строба. Это напряжение подается на управляющий элемент и перестраиваемый генератор. Выходное колебание генератора подстраивается под частоту и фазу входного сигнала. После окончания входного сигнала параметры выходного колебания сохраняются на теоретически сколь угодно длительное время. Но практически время хранения ограничивается стабильностью параметров перестраиваемого генератора.
При использовании многоканальных приемников, в том числе и приемников с цифровым анализом спектра разведываемого сигнала, запоминание частоты сводится к запоминанию номера фильтра, в котором обнаруживается сигнал. Точно также запоминание результата цифрового измерения частоты - это запоминание числа, формируемого счетчиком.
1.3. Пеленгация РЭС средствами РРТР
Пеленгаторы служат для определения пространственных координат объектов разведки, т. е. измерения пространственных параметров разведываемых сигналов. К пеленгаторам предъявляются высокие требования по быстродействию (возможность измерения пеленга по максимально короткой реализации сигнала, в пределе - по одному импульсу), по точности пеленгации, по разрешающей способности.
Различают два основных способа определения пеленга: амплитудный и фазовый.
Амплитудный способ основан на анализе амплитудного распределения поля, создаваемого пеленгуемым сигналом, на раскрыве приемной антенны. Известны три разновидности амплитудного способа: пеленгование по максимуму, по минимуму и пеленгование на основе сравнения.
Способ максимума применяют средства РРТР, работающие в дециметровом и сантиметровом диапазонах, в которых можно построить остронаправленные антенны.
Диаграмма направленности (ДНА) F(ϕ,θ) такой антенны показана на рис. 1.16, где обозначены: ϕа- угол ориентации максимума ДНА; ϕи - угол между заданным направлением и направлением на источник излучения (истинный пеленг источника); ϕ - угол между направлением максимума ДНА и направлением на источник излучения (измеренный пеленг).
При пеленговании пространственное положение ДНА изменяется и направление максимума совмещается с направлением на источник излучения. По угловому положению ДНА отсчитывается пеленг. При использовании метода максимума ДНА обеспечивается большая дальность пеленгации, поскольку средство РРТИ работает с большим уровнем сигнала. Но точность пеленгации невысока - она определяется крутизной ДНА в окрестное ста максимума и составляет, как считается,
примерно 0,1 от ширины ДНА по уровню половинной мощности.
Способ минимума применяется, когда можно сформировать ДНА с ярко выраженным минимумом приема (рис. 1.17). Пеленгование осуществляется путем поворота ДНА до положения, при котором уровень сигнала на выходе приемника имеет минимальное значение.
При пеленгации по способу минимума достигается более высокая точность измерения, поскольку в окрестности минимума ДНА имеет большую крутизну зависимости F∂(θ)/∂θ.
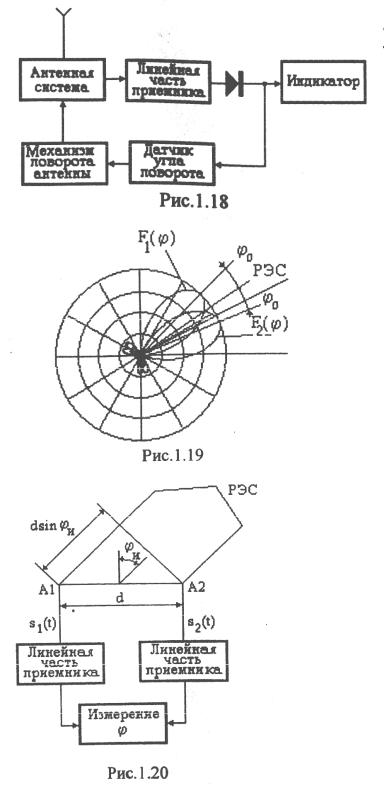
Но дальность действия пеленгаторов по минимуму меньше, чем пеленгаторов по способу максимума (уровень принимаемого сигнала меньше). Структурная схема амплитудного радиопеленгатора, работавшего по способу максимума или минимума, представлена на рис.
1.18 [2].
Сущность метода равносигнальной пеленгации иллюстрируется рис. 1.19.
В соответствии с этим методом пеленг на РЭС определяется путем сравнения сигналов на выходе радиопеленгатора, принимаемых лепестками F1(ϕ−ϕ0) и F2(ϕ−ϕ0) ДНА. Отсчет пеленга производится при равенстве амплитуд сигналов на выходе приемного устройства радиопеленгатора. Способ сравнения устраняет недостатки способов минимума и максимума.
Фазовый способ пеленгования основан на использовании зависимости разности фаз сигналов, принимаемых двумя одинаковыми антеннами (А1 и А2 на рис. 1.20), которые разнесены в пространстве на некоторое расстояние (базу d). Разность фаз сигналов s1(t) и s2(t) на несущей частоте ω0 при
истинном пеленге ϕи определяется |
|
∆φ=ω0∆τ=(ω0d/c)sin ϕи |
(1.23) |
где ∆τ - временная задержка прихода сигналов на разнесенные антенны; с - скорость света,
Из (1.23) следует, что пеленг на источник из-
лучения определяется: |
|
ϕи =arcsin(c∆φ/ω0d) |
(1.24) |
Как следует из (1.24), для определения пеленга на РЭМ необходимо измерить частоту ω0 принимаемых сигналов и разность фаз ∆φ сигналов в разнесенных точках приема. Для исключения многозначности отсчета пеленга используют антенную систему с несколькими различными по величине базами.
Иногда от пеленгаторов не требуется вычисления угла ϕи, а достаточно измерения значения некоторой функции от этого угла, например направляющего косинуса, т. е. косинуса угла между базой