

РАДИОЭЛЕКТРОННАЯ БОРЬБА: РАДИОРАЗВЕДКА И РАДИОПРОТИВОДЕЙСТВИЕ
.pdf
|
Решая уравнение (10.84) относительно |
Rц |
max=Rпд, и учитывая (10.86), можно |
|
получить |
R |
под |
|
|
= Rпод ( |
Rn |
) |
|
|
|
||||
|
|
е=0 |
0 |
Rц |
||
|
|
|
|
|||
|
|
|
|
|
||
|
|
|
|
(10.87) |
|
|
Если теперь уравнение (10.86) решить относительно (ЭП)шп и учесть (10.87), можно найти потребный энергетический потенциал станции активных вынесенных шумовых помех
(рис.10.76):
(ЭП)шпП е=0 = µ = ( Rn )2
(ЭП)шпсовмещ Rц
(10.88)
Зависимости (10.87) и (10.88) показаны на рис. 10.78,а,б.
На основании рассмотрения этих графиков можно сделать следующие выводы.
6. Чем ближе к РЛС по сравнению с целью (Rп/Rц < 1) находится постановщик помех,
тем меньшей мощностью шумовой помехи он обеспечивает заданную дальность подавления РЛС.
7. При заданном энергетическом потенциале станции активных шумовых помех (ЭП)шп=соnst, чем ближе к РЛС находится постановщик помех, тем меньше обеспечиваемая им дальность подавления РЛС.
Представляет интерес исследование зон подавления вынесенными шумовыми помехами. Рассмотрим частный случай (рис.10.79): εц=ε`ц=0, Rn=Rц, ∆εП≠0.
Дальность подавления РЛС зависит угла ∆εП и эту зависимость можно найти, когда постановщик помех вращается по окружности R=const. Для рассматриваемого случая из формул (10.87), (10.88) и (10.67):
|
|
|
|
1 |
|
Rпод |
( |
πDA ∆ε n ) |
|
|||
Rпод |
|
|
= Rпод |
≈ |
0 |
|
λ |
(10.89) |
||||
|
|
|
|
|
|
|
||||||
|
∆е≠0 |
|
|
|
|
|
|
|
||||
|
fa (∆ε n ) |
|
sin( |
πDA ∆ε n ) |
|
|||||||
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
λ |
|
|
|
8.Минимальная дальность подавления Rпод0 имеет место при совмещенных помехах, когда шумовая помеха действует по главному лепестку ДНА РЛС.
9.При ∆εП≠0 дальность подавления меняется по закону ДНА РЛС fA-1(∆εП). При этом, когда ∆εП=0,5k∆εA (∆εA - ширина главного лепестка луча ДНА РЛС), в направлениях нулевого приема шумовая помеха не эффективна вовсе и дальность обнаружения РЛС определяется внутренними шумами приемника.
Зоны подавления (границы максимальных дальностей обнаружения в РЛС) условно показаны на
рис.10.79. Везде в зонах Rобн >Rпод(∆εП) помехи эффективны. Работа по боковым лепесткам характерна для постановщиков помех, действующих из зон барражирования.
В реальных условиях ударные ЛА, действующие в сопровождении постановщиков шумовых помех, должны одновременно прикрывать цели от многочисленных РЛС обнаружения, функционирующих в объемных зонах ПВО. При этом РЛС обнаружения постоянно обмениваются информацией, так что требуется подавлять одновременно все РЛС обнаружения. Эта сложная задача требует проведения предварительных расчетов с учетом конкретных типов РЛС и их местоположения. Так как подобная информация обычно отсутствует, приходится снабжать постановщики помех станциями повышенной мощности. Очень важно также выбрать правильно маршруты для ударных самолетов и постановщиков помех. При этом надо учитывать специфическую радиолокационную видимость ударных ЛА. Это утверждение требует комментариев.
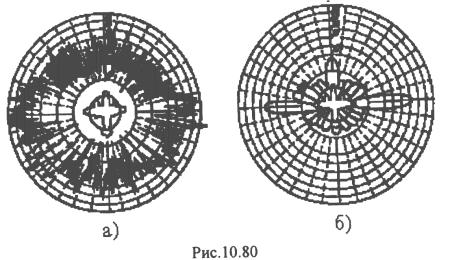
Если снять круговую (в азимутальной плоскости) зависимость дифференциальной ЭПР от азимута (это делается с помощью РЛС с игольчатой диаграммой направленности антенны), то мы получим картину, показанную на рис. 10.80,а.
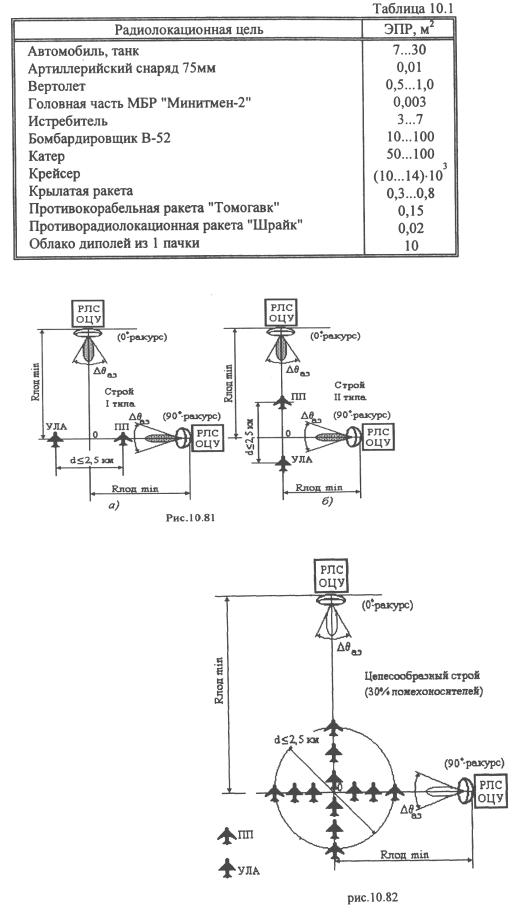
Изрезанность диаграммы вызвана интерференционными явлениями, создаваемыми блестящими точками обшивки ЛА. Интерференционные явления приводят к так называемому амплитудному и угловому мерцанию, поскольку при изменениях во времени ракурса а, под которым видна цель, дифференциальная ЭПР σ(α,t), оказывается случайным процессом. В связи со сказанным принято дифференциальную ЭПР усреднять, взяв не игольчатый луч РЛС (рис. 10.80,б), а луч конечной ширины, например ∆θA=100. Измеренная таким образом ЭПР получается усредненной σ(α), практически не зависящей от времени. Такая усредненная ЭПР и является основной характеристикой радиолокационной видимости любого летательного аппарата. Анализ подобных диаграмм σ(α), снятых для различных радиолокационных целей, позволяет выявить некоторые общие закономерности. Во-первых, любые цели, выполненные без применения технологии "Стелз", спереди и сзади имеют минимальную ЭПР. Значения этой ЭПР приведены в табл. 10.1. Во-вторых, под боковыми ракурсами ЭПР возрастает на 10...30 дБ, в зависимости от типа ЛА. В-третьих, если станции активных шумовых помех с-самолета- постановщика помех надежно прикрывает ударный ЛА от РЛС, находящихся спереди и сзади (здесь σ - минимальна), то РЛС ПВО, находящиеся под боковыми ракурсами (α=90, 270°), могут не быть подавлены (при большой боковой ЭПР не хватает мощности помехи), и эти РЛС в объемной зоне ПВО будут видеть ударные ЛА.
Чтобы избежать этого, существует ряд методов, в первую очередь правильный выбор строев постановщиков помех.
На 10.81,а показан строй I типа, когда постановщик помех (ПП) находится между боковой РЛС и ударным ЛА (УЛА) и когда для обеспечения заданной Rпод min требуется меньшая мощность помехи.
На рис. 10.81,6 показан строй II типа, когда постановщик помех летит впереди ударного ЛА и имеет станцию активных помех повышенной мощности.
На рис. 10.82 представлен строй из девяти ударных ЛА, охраняемых четырьмя постановщиками помех, расположенных по окружности (строй III типа).
Расчеты потребного энергетического потенциалы станций шумовых помех (ЭП)шп min, размещенных на самолетахпостановщиках помех, когда строевые ЛА имеют ЭПР σ =10м2 (спереди) и σ=50м2 (сбоку), показывают, что наиболее целесообразен строй Ш типа. При расчетах полагалось, что самолеты-постановщики помех могут лететь на малой и на большой высоте и встречают отдельные РЛС обнаружения и целеуказания (ОЦУ) под раз-
личными ракурсами. Для типовых энергетических потенциалов (ЭП)рлс потребный (ЭП)шп для строя III типа (рис. 10.82) заметно уменьшается, по сравнению (ЭП)шп для строев I и II второго типов (рис.10.81). Но расчеты показывают также, что реальные постановщики помех не всегда прикрывают ударные ЛА с боковых ракурсов.
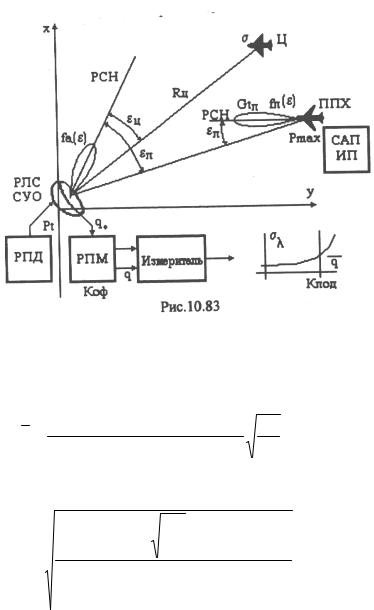
10.10. Вынесенные имитационные помехи
Есть некоторые особенности применения имитационных помех против РЛС систем управления оружием со следящими измерителями. Принцип такого РЭП иллюстрируется рис.10.83.
Для этого случая нетрудно подсчитать отношение помеха/сигнал на входе измерителя, входящего в состав РЛС:
q = |
Pmax Gtп |
4πf 2 |
п (ε`n ) fa |
2 (ε П )R2 ц |
Ka |
(10.90) |
||||||
P G |
σK |
|
f |
4 |
(ε |
|
|
)R 2 |
Kп |
|||
|
обр |
ц |
|
|||||||||
|
t |
a |
|
|
a |
|
п |
|
|
|||
Решая это уравнение относительно (Rц max )ип=R пд ,можно получить дальность подавления РЛС системы управления оружием вынесенными имитационными помехами:
(ЭП)* РрлсσRп |
2 |
|
Kn |
Kобр Кподпор (Рср ) |
|
|||||||
|
|
|
|
|||||||||
Rпод = (Rцmax )ип = 4 |
|
|
Ka |
|
|
|
|
|
|
|
(10.91) |
|
|
|
f |
2 |
(ε |
n |
) f |
n |
2 (ε` ) |
||||
(ЭП)ип ]4π |
|
|
a |
|
|
|
n |
|
|
|||
|
|
|
fa |
4 |
(εц ) |
|
||||||
|
|
|
|
|
|
|
||||||
Формула (10.91) по структуре совпадает с формулой (10.84) для шумовых помех. Отличие состоит в других энергетических потенциалах РЛС станции активных помех (10.97), а также в коэффициенте подавления
Кподпор (Рср ) = |
q |
пор |
(10.92) |
зависящем от вероятности срыва слежения в измерителе.
Поскольку формулы (10.84), и (10.91) аналогичны, все выводы, сделанные дяя вынесенных шумовых помех, сохраняются и для вынесенных имитационных.
Для того, чтобы не подвергать постановщиков помех опасности атаки ракетами с пассивными головками самонаведения, наводящимися на помеховое излучение, эти постановщики помех применяются из зон барражирования на больших удалениях, превосходящих дальность наведения ракет

Rn>>Rц,. Но задачи этих постановщиков помех остаются теми же: подавить шумовыми или имитационными помехами по боковым лепесткам РЛС зенитных комплексов, прикрывающих объект атаки ударных ЛА. При этом должна быть обеспечена заданная дальность подавления Рпд, т.е. максимальная дальность действия РЛС.
Для оценки Рад обычно используют формулу (10.91), которая при Ка=Кп=Кобр=1; ε'п=εц=0; εп=∆εп принимает вид
Rпод |
|
(ЭП)рлсσКподпор Кбл |
|
||
|
бар = 4 (ЭП) |
/ R2 |
4π |
(10.39) |
|
|
|||||
|
|
||||
|
|
сап |
п |
|
|
где (ЭП) - энергетические потенциалы, имеющие размерность либо энергии (для шумовой помехи), либо мощности (для имитационной помехи); Kбл, -коэффициент ослабления помехи, принимаемой по боковым лепесткам антенны РЛС,
Кбл = fa2 (∆ε п ) |
(10.94) |
Анализируя формулу (10.93),можно сделать следующие выводы.
1. Эквивалентный энергетический потенциал станции активных помех уменьшается с ростом Rбл и Rп:
(ЭП)сапэ = (ЭП2 )сап Rп Kбл
2. С ростом эффективной поверхности отражения цели требуется повышение мощности излучения станций активных помех.
Применение одноточечной некогерентной помехи для подавления РЛС из одной вынесенной движущейся точки иллюстрируется (рис. 10.84).
При этом вынесенные помехи могут быть как шумовыми (генераторными или ответными), так и имитационными. Моноимпульсный пеленгатор принимает вместе с помехой^отраженный от цели сигнал.
Пространственное разнесение двух точек задается вектором
dn (t) =  [xc (t)− xn (t)]2 + [ yc (t)− yn (t)]2 + [zc (t)− zn (t)]2 ,
[xc (t)− xn (t)]2 + [ yc (t)− yn (t)]2 + [zc (t)− zn (t)]2 ,
где Цс=[Xс,Ус,Zc], ЛЦп=[Хп,Yп,Zп]-векторы пространственного положения истинной и ложной целей.
Задача заключается в том, чтобы за все время существования ложной цели выбирать ее положение (траекторию) так, чтобы она вместе с истинной целью всегда находилась в главном лепестке ДНА антенны радиопеленгатора. Для этого нужно управлять разностным вектором dп(t);)=Цc-ЛЦп, заданным своими проекциями:
∆х=(Хс-Хп); ∆у=(Уc-Уп); ∆z=(Zc-Zп).
В противном случае резко возрастает требуемая мощность помехи. При этом должно быть обеспечено превышение помехи над сигналом в точке расположения пеленгатора:
|
|
Pп |
|
|
|
|
|
|
|
|
|||
q = |
|
|
> qпор |
|||
|
||||||
|
|
Рс |
входРПГ |
|||
Этих условий обычно достаточно для того, чтобы радиопеленгатор следил за ложной целью после срыва слежения за целью истинной, что происходит автоматически. В этом смысле наилучшей является маскирующая ШП, так как она вначале подавляет отраженный сигнал и РПГ автоматически следит за более сильной помехой.
Если применяют имитационную помеху, часть ее используют вначале для перенацеливания системы автосопровождения по дальности и по скорости, а потом автоматически перенацеливается на ложную цель угломерный канал. Для обеспечения эффективности имитационных помех, алгоритмы их формирования должны быть учитывать местоположение и движение цели.
Для произвольной точки в пространстве чертежа (рис. 10.84) с угловыми координатами θ, ϕ(и направляющими косинусами cosϕ, cosθ или 3 (угол места) и а (азимут) справедливы соотношения
cosθ= cosa cosβ; cosϕ=sina cosβ; cos=sqr(cos2 θ+cos2 ϕ)
Тогда при аппроксимации диаграммы направленности антенны РЛС зависимостью вида sinx/x, можно получить (с учетом того, что ε=π/2-β
|
|
|
|
|
|
πD |
A |
|
|
|
|
|
|
|
|
|
|
|
|
πD |
A |
|
|
|||||||||
|
|
|
sin 2 |
|
|
|
|
|
|
cos β |
|
|
|
sin 2 |
|
|
|
|
|
|
cos2 θ + cos2 ϕ |
|||||||||||
|
|
|
|
|
λ |
|
|
|
|
|
λ |
|
||||||||||||||||||||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|||||||
f N (θ ,ϕ) = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 , но |
|||||
πD |
A |
|
|
|
|
2 |
|
|
|
πD |
A |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
cos |
β |
|
|
|
|
|
|
|
|
|
|
|
|
cos2 θ + cos2 ϕ |
||||||||||
|
|
|
λ |
|
|
|
|
|
|
|
|
λ |
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
cosθ = |
x |
,cosϕ = |
|
y |
, R = |
|
x2 |
+ y2 + z 2 |
, откуда |
|
||||||||||||||||||||||
|
R |
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
sin 2 |
( |
πD |
A |
|
(x2 |
+ y2 ) |
) |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
λ |
|
1+ z 2 |
|
|
||||||||||||||
f N2 (θ ,ϕ) = f N2 (x, y, z) = |
|
πD |
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
( |
A |
|
|
|
(x2 + y2 ) |
)2 |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
λ |
|
|
|
|
1+ z 2 |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
При шумовой помехе (ЭПшп и полоса ∆fшп заданы) и известном энергетическом потенциале РЛС (ЭП)*=PtGa отношение помеха/сигнал на выходе антенны РЛС может быть определено так:
|
|
(ЭП) |
шп |
R4 |
f 2 |
(θ |
п |
,ϕ |
п |
) |
∆fпр |
||
|
|
||||||||||||
q0 |
= |
|
c |
N |
|
|
|
|
|
|
|||
|
|
2 |
4 |
(θс |
,ϕ |
|
|
|
|
|
|||
|
|
(ЭП) * Rп |
f N |
с ) |
∆fшп |
||||||||
При этом декартовы координаты истинной и ложной целей определяются с учетом того, что
Rп (t)=  [∆x(t)+ xc ]2 + [∆y(t)+ yc ]2 + [∆z(t)+ zc ]2
[∆x(t)+ xc ]2 + [∆y(t)+ yc ]2 + [∆z(t)+ zc ]2
Rc (t)=  xc2 + yc2 + zc2 ,
xc2 + yc2 + zc2 ,
а пеленги помехи и цели различаются как: |
θn-θc=∆θ; ϕn-ϕc=∆ϕ, где |
|
|
||
|
ξ |
(ξ 2 +η |
+ ς 2 ) |
|
|
∆θ = |
sinθc [1+ 2(ξ cosθc +η cosϕc + ς 1− cos2 θc |
− cos2 ϕc )]; |
|
||
|
η |
(ξ 2 +η |
+ ς 2 ) |
|
|
∆ϕ = |
sinϕc [1+ 2(ξ cosθc +η cosϕc |
+ ς 1− cos2 θc |
− cos2 ϕc )]; |
(10.95) |
|
Соотношения (10.94), (10.95) определяют угловой разнос истинной и ложной целей, а одновременно и ошибку пеленгования, в случае полного перенацеливания радиопеленгатора с истинной на ложную цель.
Иногда для перенацеливания радиопеленгатора (любого, в том числе моноимпульсного) на энергетический центр пары цель - ложная цель применяют двухточечные некогерентные помехи создаваемые двумя ложными целями или целями с совмещенными помехами.
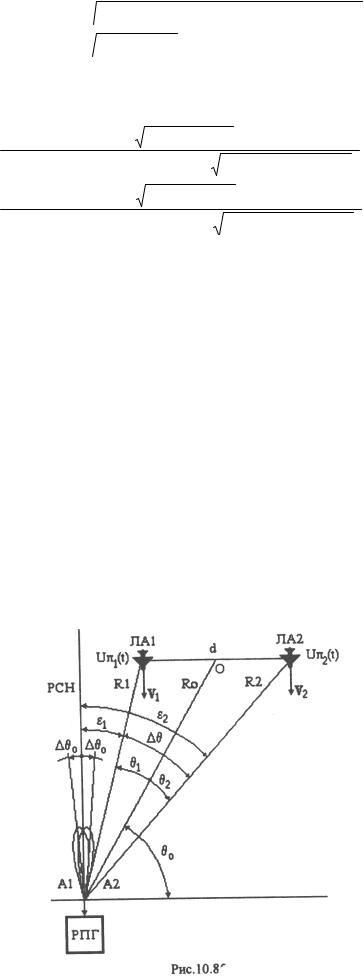
Геометрические соотношения для исследования действия на РЛС двухточечной некогерентной помехи показаны на рис. 10.85.
Два летательных аппарата с некогерентными станциями помех двигаются навстречу моноимпульсному радиопеленгатору суммарно-разностного типа. Плоскость чертежа на рис. 10.85 совпадает с углом 6 (ϕ=0). Излучаемые помехи простейшей структуры - гармонические колебания
u |
|
|
. |
|
ni |
(t)= Re E ni e jwit , j = 1,2 |
(10.97) |
||
|
|
|
|
|
|
|
|
|
|
где Ёni = Еi, exp(-jψi) - комплексные огибающие.

Диаграммы направленности антенн А1 А2; радиопеленгатора, развернутые на угол ∆θо
относительно равносигнального направления, описываются соотношением |
|
|
fNi(ε)=fNi,( ∆θо ±ε). |
(10.98) |
|
где ε - пеленг произвольного источника помехи. |
|
|
Диаграммы, соответствующие (10.98), показаны на рис. 10.86. Пеленги целей εi дадут |
||
следующие напряжения на выходах антенн A1, A2: |
|
|
u1(t)=E1 fn (∆θо-ε1) соs(ω1t -ψ1)+E2 fn (∆θо-ε2) соs(ω1t -ψ2); |
|
|
u1(t)=E1 fn (∆θо+ε1) соs(ω1t -ψ1)+E2 fn (∆θо+ε2) соs(ω1t -ψ2); |
(10.99) |
|
На выходе УПЧ суммарного и разностного моста формируются напряжения
uΣ=u1+u2; u∆= u1+u2
На выходах УПЧ суммарного и разностного каналов будут напряжения
uΣ(t)=KΣ{E1[ fN (∆θо-ε1)+ fN (∆θо-ε1)]соs(ωпр1t -ψ1)+E2 [ fN (∆θо-ε2)+ fN (∆θо-ε2)]соs(ωпр2t -ψ2)};
u∆(t)=K∆{E1[ fN (∆θо-ε1)- fN (∆θо+ε2)]соs(ωпр1t -ψ1)+E2 [ fN (∆θо-ε2)+ fN (∆θо-ε2)]соs(ωпр2t -ψ2)}; |
(10.101) |
а на выходе синхронного детектора, который выделяет усредненное колебание:
uфд=K' uΣ(t) u∆(t) |
(10.102) |
Уравнение дискриминационной характеристики радиопеленгатора в двухцелевой ситуации представляется как
uфд=K' KΣ K∆{E12 [fn2 (∆θo-ε1)- fn2 (∆θo-ε1)]+ fn2 (∆θo-θ-∆θ)- fn2 (∆θo-θ-∆θ)]} |
(10.03) |
Приняв за начало отсчета пеленг первой цели ε1=θ, так что ε2=θ+∆θ, уравнение обобщенной дискриминационной характеристики в двухцелевой ситуации (10.101) можно представить в следующей форме:
uфд=Kфд{β2 [fn2 (∆θo-θ)- fn2 (∆θo+θ)]])+ [fn2 (∆θo-θ-∆θ)- fn2 (∆θo+θ+∆θ)]} |
(10.104) |
|
Здесь |
|
|
Kфд=K' KΣ K∆E22 , β=E1/E2 |
(10.105) |
|
Для частного случая β=1 (мощности излучения обеих источников одинаковы) при гауссовской аппроксимации диаграммы направленности антенны
|
2 |
|
|
ε |
|
2 |
|
|
fn |
(ε ) = exp−π |
|
|
, |
(10.106) |
|||
|
∆ε |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
где ∆εa - эффективная ширина главного лепестка, близкая к ширине ∆θ0,5 луча по уровню половинной мощности.
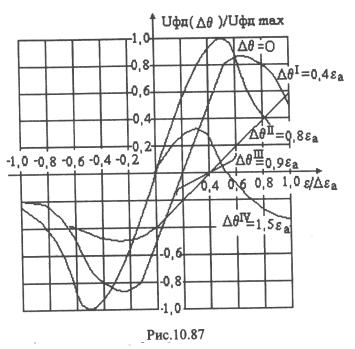
На основании (10.103) можно построить дискриминационные характеристики радиопеленгатора. Семейство таких характеристик для разных углов разнесения целей ∆θ построено на рис. 10.87.
Первая кривая при ∆θ=0 соответствует одноцелевой ситуации (на рис. 10.84 d=0). Здесь нуль дискриминационной характеристики точно соответствует равносигнальному положению антенной системы радиопеленгатора. В этом случае радиопеленгатор следит за одиночной целью. Вторая кривая на рис. 10.87 (∆θ'=0,4∆εa) и третья (∆θ''=0,8∆εa) показывают, что нуль дискриминационной характеристики соответствует точно геометрическому центру О (середины базы). Значит при р=1 пеленгатор следит за геометрическим центром парной цели. При этом видно, что крутизна дискриминационной характеристики в нуле Кд уменьшается по мере разноса целей. При некотором разнесении
∆θ'''=∆θp=(0,8...0,9)∆εa (10.107)
крутизна дискриминационной характеристики Кд->0. В этом случае пеленгатор находится в безразличном состоянии и не сможет следить ни за одной целью. При дальнейшем увеличении разноса целей ∆θIV>∆θp пеленгатор начинает пеленговать одну из целей и на дискриминационной характеристики появляются два нуля, соответствующие угловому положению обеих целей. Угол (10.105) называется углом разрешения парной цели и играет важную роль в теории эффективности некогерентных помех.
Дискриминационная характеристика (10.102) при неравенстве мощностей излучения (β≠1) и при малых угловых разносах ∆θ<<∆εa когда ДНА можно аппроксимировать зависимостями
fn(∆θo±θ)=fn(∆θo)± f'n(∆θo ) θ (10.108)
принимает вид

uфд = 4Кфдf'n(∆θo )[θ(1+β2 )-∆θ] |
(10.109) |
Нуль дискриминационной характеристики uфд=0 соответствует смещению
θ=∆θ/(1+β2)
Отсюда видно, что равносигнальное направление пеленгатора в этом случае ориентируется на энергетический центр парной цели. Строгое решение уравнения дискриминационной характеристики (10.109) определяют угол θ1 (рис. 10.85), т.е. отклонение равносигнального направления пеленгатора относительно пеленга первой цели в зависимости от углового разноса ∆θ. Эти графики показаны на рис. 10.88.
Из кривых рис. 10.88 видно, что с увеличением β=E1 / E2 уменьшается ошибка сопровождения источника с большей мощностью.
Наличие парной некогерентной цели влияет на динамику следящего контура углового дискриминатора. Анализ этого явления подробно рассмотрен [2]. Развитый в [2] подход позволяет найти точное решение для крутизны дискриминационной характеристики пеленгатора Кд в ее нуле. Так, на рис. 10.89 приведена зависимость крутизны дискриминационной характеристики для β=∆θ0/∆εa=0.3 и для различных М - коэффициентов усиления цепи АРУ. Графики показывают, что с увеличением углового разно целей ∆θ коэффициент передачи дискриминатора убывает тем в большей степени, чем меньше коэффициент µ обратной связи в АРУ. При ∆θ=0,85∆εa в системе наступает
безразличное состояние (Кд->0) и происходит разрешение парной цели. Следует отметить, что по мере уменьшения Кд, до момента разрешения в пеленгаторе сильно увеличивается динамическая ошибка слежения за парной целью, т.е. возникает запаздывание отсчетов по мере движения парной цели.
Исследуем теперь объективное поведение фазового фронта электромагнитной волны от парной цели с некогерентными помехами, независимо от того, за чем следит радиопеленгатор любого типа. Геометрические соотношения задачи показаны на рис.10.90.
Станции активных помех обеих целей излучают гармонические колебания:
u1(t)=Re{E1ejωt}, u2(t)=Re{E2ej∆ψejωt},
где ∆ψ - случайная разность фаз двух некогерентных колебаний.
В точке приема О на входе антенной системы радиопеленгатора сформируется суммарное колебание
u |
|
(t) = u |
|
Σ |
t − |
||
|
1 |
|
r |
|
|
|
|
|
1 |
|
+ u |
2 |
t − |
|
c |
|||||
|
|
|
r |
|
= Re{E e |
− jkr |
jωt |
}+ Re[E |
|
− jkr |
− j∆ψ |
|
jωt |
]= Re{E |
|
|
− jkr |
jωt |
} |
2 |
|
1 e |
|
e |
1 e |
|
e |
|
Σ |
e |
0 e |
|
||||
|
|
|
|
|
||||||||||||
c |
|
1 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(10.110)
Запись (10.110) эквивалента утверждению о том, что фиктивный суммарный источник ЁΣ установлен в точке А (рис. 10.90) на удалении r0 от радиопеленгатора. Из (10.110) следует