

РАДИОЭЛЕКТРОННАЯ БОРЬБА: РАДИОРАЗВЕДКА И РАДИОПРОТИВОДЕЙСТВИЕ
.pdf
|
. |
+ mфξ (t)]* cos{2π [fo + ∆f (t)]− mфη(t) − ϕ0 (t)}]= |
|
|
uП (t) = E(t)[[1 |
(10.11) |
|||
. |
. |
|
||
|
||||
Re E0 (t) E M (t) exp( jω0t |
|
|||
|
|
|
|
|
где
E. M (t) = 1+ mфξ (t) exp[2 jπ∆f (t)t − mфη(t)]
Такая помеха опять соответствует модели рис. 10.28, но с другим модулирующим напряжением Ём(t). Фазовая и амплитудная модуляции напряжениями видеошума η(t) , ξ(t) создает шумовое колебание со спектром рис. 10.28,8, где центральная частота fn(t)=f0+∆fп(t) изменяется в соответствии с заданным законом увода по частоте (скорости). Полоса помехи обычно составляет
∆fпш (t) (рис.10.26,в) примерно 10...20 кГц, tyвода до 10с, fn(t)=(0... 200)кГц. Иногда вместо генератора видеошума (ГВШ) используется генератор псевдослучайной последовательности, а в качестве фазового модулятора - баллансный модулятор, сильно подавляющий несущую.
Во всех станциях активных помех, формирующих помехи каналу скорости, можно добавить АМ-модуляцию выходного колебания. Изменяя Pn(t), организуют "мерцание" помехи, например, по закону меандра.
В ряде случаев, как и в помехе каналу дальности, можно создавать ложные цели (шумовые, многоспектральные и т.д.) с дальнейшим перенацеливанием (путем увода fn(t)) строба АСС на эту ложную цель.
Иногда для затруднения слежения за помехой ее мощность в момент прекращения увода (рис.10.32)
резко уменьшается.
Как и в помехе каналу дальности, имеются многопрограммные станции активных помех каналу скорости. В этих станциях одновременно излучаются помехи
разных частот, каждая из которых уводится по своему закону. В ряде станций активных помех адаптивно меняется цикл увода Ty(t). Часто помехи каналу дальности и скорости используются в одной станции активных помех (об этих комбинированных помехах речь ниже).
10.6. Совмещенные помехи угломерным каналам с линейным сканированием
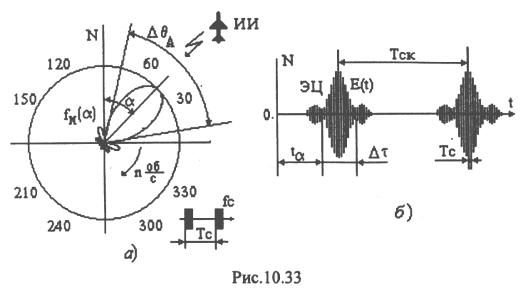
Такие радиопеленгаторы применяются, как правило, в РЛС обнаружения. Измерение пеленга цели (азимута а или угла места β) производится "на проходе" (рис.10.33,а) за счет линейного сканирования (вращения или качания) луча диаграммы направленности антенны fn(α). В точку приема, где расположена антенна углового канала РЛС, приходит периодическая последовательность радиоимпульсов, отраженных целью (рис. 10.33,6).
Каким бы ни был зондирующий сигнал Uo(t)=Eo(t) cos ωot - импульсным или непрерывным, отраженный целью сигнал будет иметь вид пачек импульсов. Форма огибающей периодических пачек зависит как от огибающей зондирующего сигнала, так и от угловой координаты цели:
Е(t)=Ео(t)fN[α(t)]. (10.12)
Период повторения пачек импульсного сигнала, отраженного целью и принимаемого сканирующей антенной РЛС, равен
Tck=1/n (10.13)
где п - скорость вращения луча антенны, обор/сек. Обратная величина периода сканирования
F = |
1 |
= n |
(10.14) |
ck Tck
называется частотой линейного сканирования и является важнейшим параметром угломерного канала (УК). Длительность пачек равна
∆τ = |
∆θ |
(10.15) |
|
n |
|
а информацию о пеленге α несет местоположение энергетического центра (ЭЦ) пачки tn, так как
a* = |
360t *α |
(10.16) |
T |
||
|
ck |
|
Величину tn и, соответственно, пеленга можно измерять различными способами.
Во-первых, пеленг может измеряться с помощью индикатора кругового обзора. Пачки с огибающей E(t) с выхода детектора (рис. 10.34) поступают прямо на ЭЛТ индикатора кругового обзора
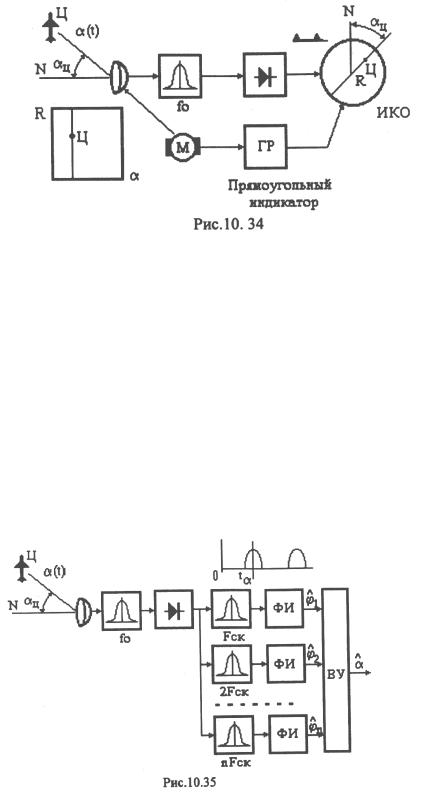
(ИКО). В это же время мотор, вращающий антенну с угловой скоростью ω =da/dt , с такой же скоростью вращает от генератора развертки (ГР) луч засветки на ИКО. Часто при помощи ИКО измеряют одновременно и пеленг, и дальность до цели, отображая положение цели в полярных координатах. В ряде случаев применяют прямоугольный индикатор с декартовыми координатами R-a (рис. 10.34). Но принцип измерения пеленга от этого не меняется.
Во-вторых, о пеленге можно судить по результатам измерения групповой задержки 1д пачек импульсов (рис. 10.33). Для этого можно применить следящую систему автосопровождения по дальности, с тем отличием, что она должна иметь большую инерционность и быть рассчитана на большие периоды повторения импульсов Тck,>>Тс. Это временной метод пеленгования.
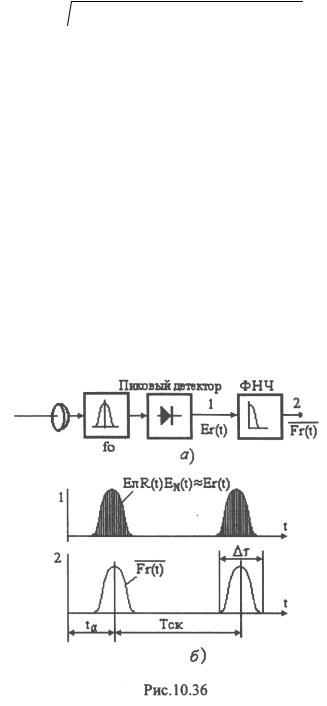
В-третьих для пеленгования на проходе может быть применен фазовый метод. Периодическая последовательность пачек импульсов (рис.10.33,6) может быть представлена рядом Фурье. Комплексные амплитуды гребенчатого (с разносом Fck) спектра равны
.
C k = Ck exp(− jϕk ) =
2Fck ∫∞ E(t − ta ) exp( j2 pFck kt)dt = 2Fck
0
Tck / 2
∫ E0 (t)
−Tck / 2
|
(10.17) |
|
|
exp( j2πkFck t) j2πkFck ta |
|
Измеряя фазы ϕ*k=2πkFt*k в схеме (рис. 10.35), можно измерить пеленг
α*гр=ϕ*1, α*т=ϕk, k≥1 |
(10.18) |
где α*гр - грубая, но однозначная оценка пеленга, а α*т - точная неоднозначная оценка.
Не всякие совмещенные помехи, излучаемые с цели, могут эффективно действовать против углового канала с линейным сканированием.
В самом деле, любые шумовые помехи (генераторные, ответные, ответные импульсные) против радиопеленгаторов с линейным сканированием малоэффективны или неэффективны. Действительно, пусть цель излучает генераторную прямошумовую помеху
un(t) = EnR(t)cos[ωot -θ(t)], |
(10.19) |
где R(t) - случайная огибающая, распределенная по релеевскому закону, а θ(t) - равновероятная фаза. Аддитивная смесь отраженного сигнала Uo(t)=Eo(t)cos ωot и помехи (10.19) представляется в
форме
ur (t) = [Eo cosω0t −θ (t)]=  E02 + [En R(t)]2 + 2Eo EпR(t) cosθ (t) cos[ω0t −ψ (t)]. (10.20)
E02 + [En R(t)]2 + 2Eo EпR(t) cosθ (t) cos[ω0t −ψ (t)]. (10.20)
Если помеха значительно сильнее отраженного сигнала |
Eп |
>> 1 огибающую смеси можно представить |
|||||
|
|||||||
в виде |
|
|
|
E0 |
|
||
|
|
|
|
|
|
||
|
|
E0 |
|
|
|
|
|
Er (t) ≈ EП R(t) 1 |
+ |
|
cosθ (t) |
(10.21) |
|||
EП R(t) |
|||||||
|
|
|
|
|
|
||
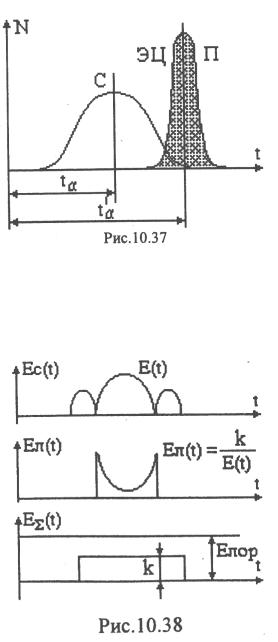
Если после детектора огибающей включить ФНЧ, как на схеме рис. 10.З6.а, то в точке 2 получится колебание, изображенное на рис. 10.36,6:
______ |
_____ |
|
Er (t) ≈ EП (R(t) ≈ EN (t)2PП |
(10.22) |
|
Таким образом, помеха на выходе угломерного канала с линейным сканированием создает последовательность импульсов, которая полностью аналогична последовательности импульсов огибающей сигнала (рис. 10.33).
Очевидно, такое помеховое колебание несет ту же информацию о пеленге цели, что и отраженный целью полезный для пеленгатора сигнал. Очевидно, что такая помеха, совмещенная с целью, не эффективна для радиопротиводействия пеленгаторам. Причиной описанного эффекта является безразличие огибающей сигналов, модулированных за счет сканирования, к внутренней структуре отраженного или излученного целью сигнала. Иначе говоря, пеленгатор с линейным сканированием определяет угловую
координату источника излучения помехи точно так же, как он пеленгует отражающую цель. По этой же причине невозможно создать помехи, совмещенные с целью и уводящие систему измерения положения
энергетического центра пачки отраженных сигналов ∆tα > ∆τ .
Поскольку совмещенные помехи, излучаемые с того же пеленга, что и отраженный сигнал, уводов по углу сделать не могут, для противодействия пеленгаторам нужны, вообще говоря, пространственно разнесенные помехи. Но, тем не менее, известны некоторые технические решения эффективных для противодействия совмещенных помех. Все эти способы основаны на использовании знания частоты сканирования пеленгатора (помехи прицельные по частоте сканирования). Существует два основных метода создания совмещенных помех для противодействия угломерным системам с индикаторами кругового обзора и с прямоугольным индикатором R-a (рис.10.34).
Во-первых, эффекта подавления пеленгатора с линейным сканированием можно достичь, подав смещенную на tα (рис. 10.37) сильную помеху, вызвав ошибку tα '- tα. Можно сделать помеху уводящей tα
(t) и тем самым организовав увод по угловой координате a(t).
Во-вторых, для подавления сигнальных импульсов применяется так называемая инверсная помеха (рис. 10.3 8). Если E(t)-- огибающая сигнального импульса, то помеха делается инверсной
EП (t) = |
k |
(10.23) |
|
E(t) |
|||
|
|
модулированная по амплитуде смесь сигнала с помехой имеет амплитуду
EΣ(t)=E(t)En(t)=k, (10.24)
в которой за счет искажения формы огибающей совершенно разрушена информация об угловой координате цели.
Для измерения частоты сканирования подавляемой РЛС Fck =1/Tck известны следующие способы.
Первый способ применим, если активная РЛС использует одну сканирующую антенну и на передачу и на прием. При этом на борту ЛА нетрудно принять зондирующие пачки сигналов вида рис. 10.33,6 и непосредственно измерить Fcк.
Второй способ используется, если РЛС может работать в пассивном режиме, пеленгуя собственное излучение цели, или может работать со сканированием только приемной антенны. В этом случае средства оперативной радиотехнической разведки не могут измерить частоту сканирования. Но весьма вероятно, что приемная антенна РЛС побочно излучает некоторые колебания, принимая которые можно судить о параметрах РЛС. Например, приемная антенна может непреднамеренно излучать колебание первого гетеродина приемного устройства. Тогда в средство оперативной радиотехнической разведки в точке, где создается помеха на частоте сканирования, принимает ослабленный сигнал (рис. 10.33, б). Очевидно, огибающая этого сигнала несет информацию о частоте
Fск=1/Tck.
Третий способ определения частоты сканирования основан на использовании зависимости ЭПР антенны радиолокатора от направления облучения: самая большая ЭПР будет при облучении по направлению максимума главного лепестка диаграммы направленности. Поэтому если на летательном аппарате поставить РЛС и облучить ее сигналами наземную РЛС с линейным сканированием, отраженный от антенны наземной РЛС сигнал
будет иметь большую амплитуду тот момент времени, когда максимум луча направлен на бортовую РЛС. Время между соседними моментами времени резкого увеличения амплитуды отраженного сигнала как раз равно периоду сканирования Тck (10.13). Очевидно, использование этого эффекта также позволяет определить Fcк.
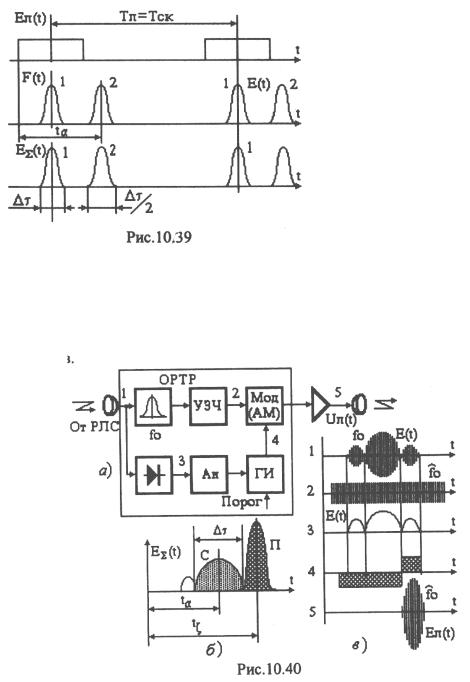
Четвертый способ - рефлексивного измерения частоты сканирования (рис. 10.39). Для реализации этого способа на борту летательного аппарата генерируется амплитудно-модулированная (вида рис. 10.33,6) помеха. Огибающая помехового колебания имеет форму меандра, а частота повторения пачек помеховых импульсов Fn(t) меняется по параболическому закону. В тот момент, когда En(t)=Fck принимаемый меандр в зависимости от фазы будет иметь огибающую En(t), показанную на рис. 10.39.
Если импульсы сигнала E(t) находятся в положении 1, импульс смеси EΣ(t)=E(t)En(t) смещения не испытывает и пеленгование цели осуществляется без ошибок. Если E(t) окажется в положении 2, импульс смеси укорачивается в два раза и ta'≠ta, т.е. возникает ошибка пеленгования. В этот момент, когда En(t)=Fck луч ДНА стягивается с цели за счет ошибочного отсчета. Эта частота Fck запоминается и в дальнейшем применяется прицельная по частоте сканирования помеха. Можно наблюдать реакцию РЛС на помеху, модулированную частотой kFck=En(t).
Вероятность того, что пеленгатору будет навязана ошибка, ta'=ta увеличивается и стягивание луча производится надежнее.
Один из возможных вариантов прицельной по частоте сканирования помехи со смещением энергетического центра представлен в виде схемы № 50 (рис.10.40,а) со смещением энергетического центра в сторону боковых лепестков.
Соответствующие формы сигналов в схеме приведены на рис. 10.40,б,в. Анализатором (Ан на схеме рис.10.40,а), входящим в состав средства оперативной радиотехнической разведки, измеряется несущая частота зондирующего сигнала РЛС f*o и анализируется (путем сравнения с порогом) уровень огибающей E(t) в точке 3. В частности, частота f*o может определяться и путем приема паразитного или непреднамеренного излучения РЛС.
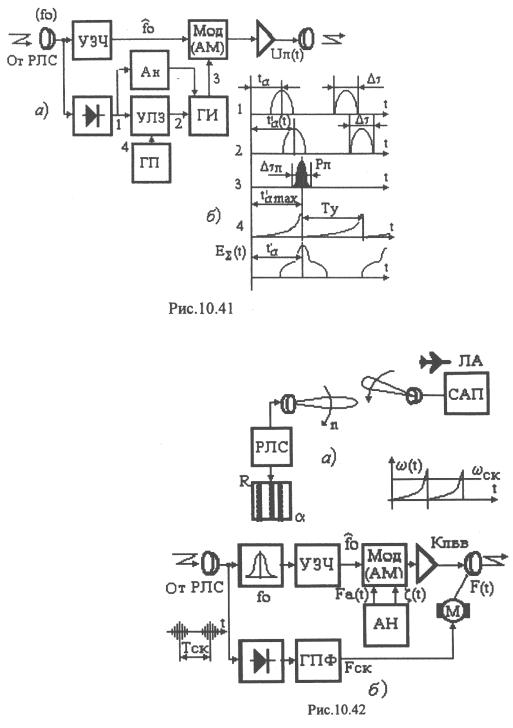
Генератор импульсов (ГИ) в точке 4 формирует запирающий импульс на время облучения ЛА левыми боковыми и главным лепестками и открывающий импульс на время облучения правыми боковыми лепестками. ЛБВ с очень большим усилением (Рп/Рс>30 дБ) пропускает импульсы помехи (эпюра в точке 5). Как видно из рис. 10.40, б, суммарная огибающая колебания на входе приемника РЛС имеет смещенный энергетический центр ta'≠ta, стимулируя ложные измерения пеленга.
На рис. 10.41, а представлена схема № 51, создающая помеху для увода по углу за счет смещения энергетического центра принимаемого в РЛС сигнала. Формы напряжений, иллюстрирующие работу схемы, показаны на рис.10.41,6.
Видеоимпульс помехи (точка 3) формируется ГИ. Этот импульс имеет меньшую длительность ∆τп.< ∆τ . Для формирования такого импульса в составе средства оперативной радиотехнической разведки нужен анализатор, оценивающий величину ∆τ принятого импульса РЛС. Величина задержки ta(t) помехового импульса уводится с помощью управляемой линии задержки. Закон увода (точка 4) обычно параболический и имеет размах
(tamax-ta) ≈(2...3) ∆τ с заходом на боковые лепестки. Помеха берется сильной (Рп/Рс >30 дБ). Такая помеха смещает энергетический центр смеси сигнала с помехой Еr Σ
(t) на выходе приемника РЛС на величину ta'-ta.
На рис. 10.42 представлена схема №52 станции формирования активных помех для угломерной системы со сканирующей антенной при коническом сканировании.
Мотор может менять частоту сканирования F(t), например, по пилообразному закону. Момент,
когда F(t) оказывается равной Рcк антенны |
РЛС, можно определить по реакции РЛС. Запомнив эту |
частоту, можно организовать синхронное |
с Fen коническое сканирование антенны станции |
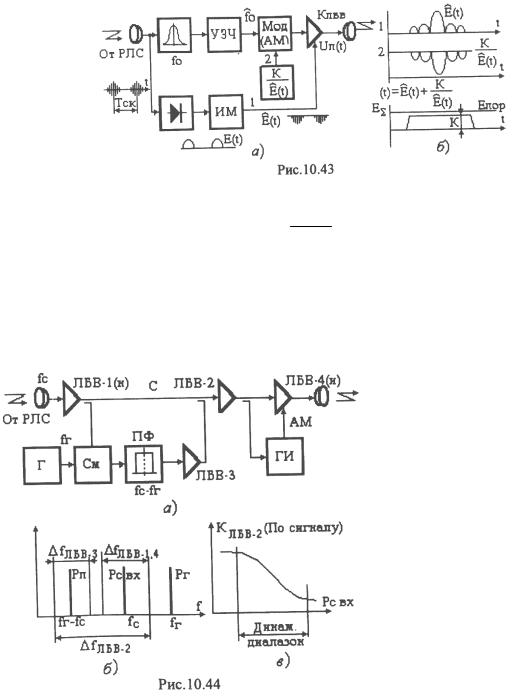
формирования активных помех. Если в модуляторе происходит шумовая модуляция ξ(t), станция формирования активных помех будет излучать шумовую помеху, промодулированную сигналом с частотой сканирования антенны. В таком случае, если Клвб > 30 дБ, на РЛС будут видны на ИКО шумовые засветки {рис. 10.42,4, соответствующие пеленгам главного и боковых лепестков. Если в модуляторе применяется другая модуляция, возможны стягивания луча РЛС с цели (рис.10.39). Энергетический центр пачек (рис. 10.42,б) можно сдвигать, если с помощью специальных помех подавлять отдельные импульсы сигналов в пачках отраженных сигналов.
На рис.10.43,а представлена классическая схема САП №53 с инверсной помехой, подавляющей информацию о пеленге при линейном сканировании.
В этой схеме с помощью инверсного усилителя
функция, излучающая помеху
k
E * (t)
формируется инверсная модулирующая
un (t) = |
k |
cosω0t |
(10.25) |
|
|
E * (t) |
|
|
|||
|
|
|
|
|
|
|
|
|
Тогда в точке приема огибающая |
||
|
|
|
EΣ (t) = E(t) |
k |
|
|
|
|
E * (t) |
||
|
|
|
|
||
|
|
|
(рис.10.43,б) будет подавлена |
||
(окажется ниже порога Епор ). Если в РЛС хаотически меняет частоту сканирования Fck, применяются так называемые мгновенные инверсные помехи, где ответная инверсная помеха с огибающей k / E(t)
отвечает на каждый импульс пачек сигналов.
На рис. 10.44 представлена схема № 54 станции активных помех с инверсной помехой, формируемой в специальной ЛБВ.
В прямой цепи (сигнальной С на рис. 10.44,а) стоят три ЛБВ: первая и четвертая имеют полосу пропускания ∆fлбв 1,4. расчитанную
на сигнал (рис. 10.44,6). В нижней по схеме цепи из сигнала fc и гетеродина fг формируется помеха промежуточной частоты fc-fr, которая проходит полосовой фильтр и ЛБВ с полосой ∆fлбв -з (рис. 10.45,6). ЛБВ-2, имея полосу ∆fлбв-2 >∆fлбв-1 +∆fлбв-3, принимает и сигнал, и помеху. Ее динамический диапазон выбран таким (рис.10.44,в), чтобы в режиме насыщения сильный входной сигнал с Рсмaх
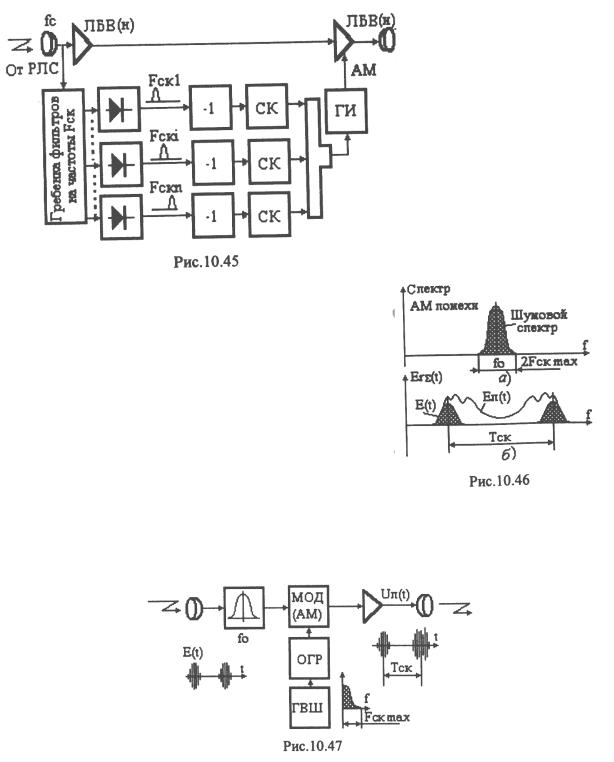
усиливался слабее, чем слабый сигнал Рсmin. Помеха вводит ЛБВ-2 в режим насыщения. За счет работы в режиме насыщения создается инверсная модуляция ответного сигнала.
На рис. 10.45 приведена
схема |
№ 55 формирования |
|||
многоканальной |
инверсной |
|||
помехи, |
способной |
подавлять |
||
одновременно |
несколько РЛС с |
|||
различными |
частотами |
ска- |
||
нирования. |
В этой схеме вы- |
|||
деляются пачки импульсов |
с |
|||
разными частотами |
повторения |
|||
Fog. |
Затем |
импульсы |
||
инвертируются по амплитуде и с помощью единого ГИ управляют помехой (ответным сигналом) с различными Fcki.
Если высокочастотные шумовые помехи пеленгаторам с линейным сканированием не эффективны, можно применять АМ-помехи, перекрывающие низкочастотными шумами всю возможную полосу частот сканирования (рис. 10.4б,а). Это помехи со случайной частотой сканирования.
Огибающая En(t) представляет собой видеошум со спектром в полосе O….Fckmin, так что суммарная огибающая колебания на входе приемника РЛС имеет вид (рис.10.46,б) ЕΣ (t)=Е(t)Еn(t). Этот эффект приводит к искажению огибающей сигнала E(t), создавая случайные скачки в оценках положения энергетического центра полезных импульсов и тем самым вызывая случайные ошибки пеленгования. Одна из возможных
схем станций активных помех подобного рода № 56 показана на рис. 10.47. Вместо АМ-модулятора в схеме рис. 10.47 можно создать модуляцию помехи за счет конического сканирования антенны. При этом сканирование может быть как регулярным, так и хаотическим En(t).
Известен целый ряд помех (типа когерентных или поляризационных), которые искажают фронт волны в точке приема или, вернее, на раскрыве приемной антенны РЛС. За счет искажения фронта создается ошибка пеленга. Когерентные помехи создаются с помощью пространственно разнесенных помех. Однако искажение фронта волны можно создать с помощью совмещенных помех. Для создания совмещенных когерентных помех служит станция активных помех по схеме рис. 10.48, использующая антенну с двухлепестковой диаграммой направленности. Одним лепестком диаграммы антенна направляется на РЛС, а другим - на вынесенные отражающие объекты.
На раскрыве приемной антенны РЛС когерентно складываются сигнал, отраженный от цели αс, и сигнал помехи, переотраженный от местных предметов (МП) или пассивных отражателей,
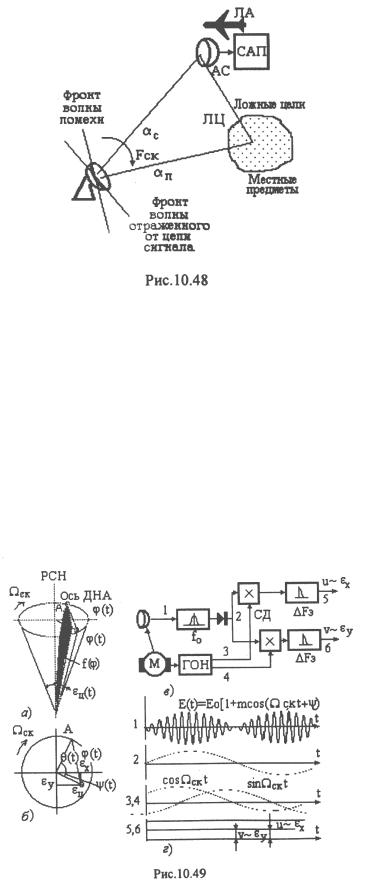
находящихся под другим пеленгом αn. Как следствие, фронт суммарной волны искажается и пеленгатор фиксирует ложный пеленг.
Подобный увод по углу можно создать, излучая помеху на ортогональной поляризации.
10.7. Совмещенные помехи угломерным каналам с коническим сканированием
Сканирующая диаграмма направленности (ДНА) антенны следящего амплитудного пеленгатора вращается относительно оси, отклоненной от направления максимума излучения на угол ε0 (рис.10.49,a). При таком сканировании направление максимума ДНА описывает в пространстве коническую поверхность с вершиной в точке расположения антенны. Оси вращения ДНА соответствует равносигнальное направление (РСН). Если цель имеет пеленг εц ,то на большом удалении от пеленгатора взаимное угловое положение цели и направления максимума ДНА будет таким, как на рис. 10.49,6.
Угловое отклонение цели относительно максимума луча ДНА ϕ(t) определяется