

РАДИОЭЛЕКТРОННАЯ БОРЬБА: РАДИОРАЗВЕДКА И РАДИОПРОТИВОДЕЙСТВИЕ
.pdf3.3. Точность определения параметров сигналов РЭС
Маскируемая система излучает сигнал C(t,λс), зависящий от времени на интервале наблюдения tε[- T/2;t/2] и набора параметров λс ε Λc.
Набор λс в условиях рассматриваемой задачи противодействия составляют параметры, информативные для РРТР. Поэтому компонентами вектора λс, кроме частоты, амплитуды, фазы, задержки, могут быть: средняя и пиковая мощности передатчика, координаты точки расположения излучающей системы, ширина спектра излучения, стабильность частоты, вид и индекс модуляции несущего колебания, а также другие величины и характеристики, нетрадиционные для задач анализа помехоустойчивости . Но основные скрываемые параметры - это координаты точки расположения РЭС, характерные частоты излучения (несущие и поднесущие ), а также ширина спектра излучаемого сигнала, связанная с видом и индексом модуляции.
Качество работы разведки и эффективность противодействия оценивается по величинам ошибок, навязываемых средству разведки. Если λсo , а оцененные разведчиком значения параметров сигнала λс*, ошибки ∆= λс*- λсo можно рассматривать по традиционной схеме, выделив нормальные (малые) и аномальные (большие по сравнению с протяженностью
области значений малых ошибок) составляющие.
Ошибка принадлежит к нормальным, если она по модулю не превосходит полуширины интервала апостериорной неопределенности ∆λi/2. Эта ∆λi совпадает с интервалом разрешения (по Релею) двух сигналов по параметрам. Интервал разрешения определяется как область значений ∆λ ci в
которой существенно отлична от нуля огибающая модуля сигнальной функции (функция неопределенности). Например, как в [21]:
∆λi = ∫ qc2 (λci ,λci = 0 i≠ j ) + qc2 (λci ,λci = 0 i≠ j )dλi |
(3.41) |
Λ |
|
где qc(.) нормированная к полной энергии сигнала Q сигнальная функция [21]:
qc = |
1 |
|
C * (t,λci0 )C(t,λci0 )dλi |
(3.42) |
|
Qc T∫ |
|||||
|
|
|
|||
qc┴(.) - функция, сопряженная с qc по Гильберту [22].
Абсолютные величины аномальных ошибок определяются протяженностью интервалов априорной для средства разведки неопределенности значений измеряемого параметра. Они характеризуются вероятностью того, что ошибка оценивания превосходит по модулю пороговый для нормальных ошибок уровень:
Pa = P{ |
|
λci − λc0i |
|
>> |
∆λi |
(3.43) |
|
|
|||||
|
|
2 |
||||
|
|
|
|
|
|
Основные параметры РЭС, информативные для средств РРТР, это пространственные координаты точки расположения и рабочие частоты. Естественно, что основное внимание при анализе потенциальной точности нужно уделить радиотехнической разведке авиационного и космического базирования. В этих случаях средствам РРТР может быть доступно излучение РЭС объектов на значительной части территории страны и во всех акваториях. При рассмотрении точности оценивания средствами радиотехнической разведки пространственно - частотных параметров сигнала считается, что каждый объект разведки излучает сигнал из некоторого элементарного объема d4V около точки с обобщенными координатами {Rc,ωc} в области интересов разведки. Геометрическое подпространство области интересов разведки
V4=R3 xΏ представлено на рис.3.7, где показаны точки с координатами Rc источника разведываемого сигнала и Rп - координаты излучателя помехи, а также изображена приемная антенна средства радиотехнической разведки, под которую отведена область L. Координаты точки {Rc,ωc} измеряются средством. Считается также, что разведчик действует наилучшим для себя образом, используя всю доступную ему энергию сигнала РЭС объекта разведки и всю априорную информацию о параметрах этого сигнала. Активная маскирующая помеха, если она применяется, обязательно отличается от сигнала по информативным для разведки параметрам, т.е. излучается из элемента объема d4V около точки с координатами {Rп,ωп} в обобщенном пространстве интересов разведки.
Разумеется, кроме объекта разведки и постановщика помех в области интересов разведки, существуют и другие излучающие системы. Совместная работа всей совокупности источников излучения обусловливает сложную сигнальную обстановку, рассмотренную в связи с маскировкой сигнала от обнаружения. Поэтому предполагается, что сигнал маскируемой РЭС может быть обнаружен на фоне других сигналов, но неразличим на фоне маскирующей помехи (если она применяется). Как показано на рис.3.7, положение центра раскрыва приемной антенны средства разведки задается в системе координат Oxyz радиусом -вектором г. С раскрывом связана система координат 0'νµη. Каждая точка раскрыва имеет координаты r=rνν0+rµµ0eL, где {ν0,µ0} - орты соответствующих осей связанной системы 0νµη. Расстояние между центром раскрыва антенны СР и точкой расположения объекта разведки - наклонная дальность - р. Аналогичное расстояние до постановщика помех rn Излучаемый объектом разведки сигнал
C(t) = a(t) cos(ωt + ϕ(t)) = Re{A(t) exp[−iωt]} |
(3.44) |
где a(t) учитывает амплитудную, a φ(t) - угловую модуляцию сигнала;
A(t)=a(t)eiφ(t) - комплексная огибающая.
Каждым элементом d2r около точки г на раскрыве приемной антенны СР принимается сигнал
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
dC(R,ω, ρ,t) = Re |
|
|
|
|
A(t − |
r' |
) exp{ j[ωt − (kp') − (kp)]} d 2 r |
(3,45) |
|
|
|
|
|
||||||
|
|
|
|
|
|
||||
|
|
|
|
r |
|
c |
|
|
|
(2π 2 |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
где k-волновой вектор, нормальный к фронту волны излучения объекта разведки, поскольку средство разведки находится в однородной среде;
k = k = 2λπ = ωc ;(k') - скалярное произведение; г' и t' - радиус-вектор наклонной дальности и время
в системе 0'νµη.
Отличия г' и t' от г и t соответственно обусловлены взаимным движением объекта и средства разведки (взаимного движения координатных систем Oxyz и 0'νµη). Для рассматриваемого случая преобразования Лоренца дают [24]:
V |
2 |
Vr |
) − 2 |
V |
2 |
||
r'= (r −Vt) − 2 1− |
|
,t'= (t − |
c2 |
1− |
|
(3.46) |
|
|
t |
|
|
|
t |
|
|
где V - скорость взаимного движения координатных систем; V=|V|.
Считая, как обычно для макроскопических объектов, что V/c<<1,с преобразование (3.46) можно упростить:
r'= r −Vt,V ≈ t |
rV |
= t(1− r / c) |
(3.47) |
|
c2 |
||||
|
|
|
Из (3.47) следует, между прочим, что для той же точности приближения порядка 0(V2/c2) — справедливо
r = r'>> r 1+ |
V 2t 2 |
|
r 2 |
||
|
и для малых интервалов времени незначительно отличие |г| от г:
|
|
V |
2 |
t |
2 |
|
||
|
|
|
|
|
|
(3.48) |
||
|
|
|
|
|
||||
r |
= r + 0 |
r |
2 |
|
|
|||
|
|
|
|
|
|
|
||
Используя (3.47) и (3.48), можно определить комплексный сигнал в элементе d2r около г на раскрыве приемной антенны средства разведки:
|
|
k |
|
|
|
r 2 |
2 |
|
|
||
dC(R,ω, r,t) = |
|
|
|
|
A(t − |
|
) exp{− j[ωt'−(kr') − (kr)]}d |
|
r |
(3.49) |
|
( |
|
)2 |
|
c |
|
||||||
|
2π |
|
|
r |
|
|
|
|
|
||
В (3.49) учтено (3.48), т.е. что огибающая принимаемого сигнала мало меняется за время dt=(Vt)2/2r, а также то, что при малых размерах антенны средства разведки скорость движения всех ее элементов относительно точки расположения объекта разведки Rc одинакова и равна V-относительной скорости движения центра О в системе координат Oxyz.
Условие постоянства скорости каждой точки раскрыва антенны тождественно условию постоянства доплеровских сдвигов по раскрыву. Кроме этого, в дальнейшем используется условие пространственно-временной узкополосности сигнала C(t). Пространственная узкополосность означает, что огибающая сигнала одинакова для всех точек раскрыва L: она не изменяется существенно за интервал времени между моментами прихода сигнала на крайние точки раскрыва. Соответственно ширина спектра ∆ω меньше величины, обратной этому интервалу времени, т.е ∆ω < 2π(2r max)/c или
∆ω |
< |
λ |
. |
|
ω |
|
|
||
0 |
|
2r |
||
|
|
max |
||
Условие временной узкополосности означает малость изменений огибающей принимаемого сигнала за период несущего колебания δω/ωc<<1.
Из условия временной узкополосности вытекает, между прочим, условие малости доплеровского расширения спектра сигнала, т.е. незначительность различия доплеровских сдвигов для всех составляющих спектра. Предельный случай модели пространственной и временной узкополосности - прием очень малой (точечной) антенной монохроматического колебания. При этом огибающая колебания постоянна как по времени, так и по пространственным координатам на раскрыве антенны. Дополнительные априорные данные о конфигурации области расположения объекта разведки позволяют средству разведки сузить пространство возможных значений измеряемых координат. По крайней мере почти всегда можно понизить размерность пространства интересов разведки до V3=R2*Ω, считая, что объект разведки располагается на поверхности Земли. При этом z=z(x,y) и если в первом приближении считать Землю сферической со средним радиусом R, то
z = sqr (R2 -(х2 -у2)). На основании приведенных соображений геометрическое подпространство области интересов разведки считается двумерным R .
Для анализа точности определения пространственно-частотных параметров сигнала средствами разведки и, если эта точность оказывается высокой, для обоснования дополнительных мер по скрытию параметров, прежде всего для обоснования целесообразности применения тех или иных способов и средств маскировки, можно использовать аппарат, основанный на исследовании сигнальных функций [21]. В рассматриваемом случае временные со и пространственные k частоты - неэнергетические параметры скрываемого сигнала. Поэтому сигнальная функция q(ω,k) будет выражаться как
qc (ω, k) = |
1 |
|
C&(t, k,ω, ρ)C&(t, k,ω, ρ)d 2 rdr = |
|||
No ∫L T∫ |
||||||
|
|
|
|
|||
= |
1 |
∫ ∫ F&(t − r / c)F * (t − r / c) exp{ j∆ωt}* exp{ j[∆ωt − ∆θ (t) − (∆k(t)r)]}d 2 rdr |
||||
No |
||||||
|
L T |
|
|
|
||
где F(t-r/c) - комплексная огибающая сигнала; ∆ω- разность доплеровских сдвигов; к=2π/ω и к0=2π/ω0 - модули соответствующих волновых векторов, которые, как следует из рис 3.1 и простых геометрических построений, составляют k=(2π/λ)(ρ-R)/│r│; ∆k=k=k0- разность пространственных, а ∆ω= ω –ω0 - разность временных частот.
Линейная связь вектора пространственных координат R с вектором пространственной частоты k позволяет рассматривать сигнальную функцию как q=q(. ,k) и анализировать точность оценивания средством разведки пространственных частот излучения маскируемой системы. Переход от точности оценок пространственной частоты к точности измерения геометрических координат тривиален. Структура выражения (3.50) такова, что если размеры L и длительность наблюдения сигнала Т стремятся к бесконечности, q(ω,k) представляется трехмерным преобразованием Фурье функции
Ф(r,t)=F'(t-r/c) F*(t-r/c) |
(3.51) |
нормированного к энергии квадрата модуля комплексной огибающей сигнала на раскрыве приемной антенны. Поэтому при бесконечных пределах интегрирования в (3.50) q(ω,k) - это спектральная плотность (распределение по частотам {ω,k} мощности принимаемого средством разведки простран- ственно-временного сигнала.
Наличие дискретных источников радиоизлучения в R2*Ώ, обусловленных работой маскируемых систем, постановщиков помех и прочих систем, неинформативных для средства разведки <т.е. в сложной сигнальной обстановке), приведет к тому, что сигнал на раскрыве приемной антенны будет суперпозицией излучений вида (3.50), отличающихся по параметрам {R, ω}:
(R,r, ω,t)=Σi Ci (Ri,r, ωi,t) |
(3.52) |
iРазумеется, возможно различие парциальных сигналов С(.) и по другим параметрам (мощности, виду и индексу модуляции и т.п.). Но эти различия несущественны при анализе активного противодействия: активная маскирующая помеха по неинформативным для средства разведки параметрам должна повторять (имитировать) маскируемый сигнал. Сигнальная функция, определенная согласно (3.50), в сложной сигнальной обстановке будет суперпозицией откликов приемной системы средства разведки на сложный пространственно-временной сигнал вида (3.52), поскольку преобразование C(t,k, ω,r) к q(k, ω) в (3.52) линейно.
Отдельным дискретным источникам сигнала в R2*Ώ будут соответствовать локальные максимумы (пики) q(k, ω). Обработка при анализе сигнальной обстановки сводится при этом к анализу q(k, ω) в окрестностях ее максимумов. Возможность раздельного наблюдения локальных максимумов q(k, ω) обусловливает возможность различения (разрешения) сигналов и, соответственно, создающих эти сигналы источников излучения из области интересов разведки. Различение источников излучения по {k, ω } эквивалентно различению их по частоте и пространственным координатам. Определяя значения аргументов максимумов сигнальной функции q(k, ω), средство разведки измеряет координаты точек расположения объектов разведки (маскируемых систем) и характерные (несущие, поднесущие, средние) частоты их сигналов. Конечность раскрыва L антенны и времени Т наблюдения сигнала обусловливает случайные ошибки оценивания пространственно-частотного распределения, т.е. приводит к ошибкам определения аргументов максимумов этой функции. Наличие случайных ошибок можно приписать действию на входе приемной системы средства разведки (на раскрыве приемной антенны средства разведки) некоторого пространственно-временного шума. Следуя [23], этот шум можно считать S- коррелированным как по времени, так и по пространственным координатам. Отсутствие корреляции на конечных интервалах значений координат можно иллюстрировать следующим. Во временной области на входе приемников средства разведки действуют их собственные тепловые шумы и несосредоточенные по спектру помехи. Сосредоточенные по спектру колебания - уже сигналы, которые могут принадлежать объектам разведки или другим источникам излучения из V3. Но помехи со спектром шире, чем ∆ω =2π/T
иболее или менее равномерным в пределах протяженности частотного подпространства области интересов разведки могут считаться реализациями белого шума, S-коррелированного по времени. Кроме того, сигналы, создаваемые на раскрыве антенны приемника средства разведки разными источниками, независимы, если эти источники можно считать независимыми и точечными (когда дальность до них существенно превосходит их протяженность и параллакс пренебрежимо мал). Для протяженных естественных источников (неба, земной поверхности) также справедливо предположение о некоррелированности излучения из каждого элемента объема dV3=d2R dω, т.е. источники естественных излучений по пространству также 5-коррелированы, как и по времени.
Впринятых условиях (при неэнергетических измеряемых средством разведки параметрах kµ, kν,
иω, а также при δ-образной корреляции пространственно-временной помехи измерениям) дисперсии оценок максимального правдоподобия находятся на основании анализа условных ковариаций ошибок измерений ||SJ||: σ2 =Sij. Матрица условных ковариаций обратна информационной матрице Фишера [23], элемента которой равны [15]:
|
d 2 |
|
|
|
|
|
|
|
|||
Bij = − |
|
q(λ) |
|
λ =λ0 |
(3.53) |
|
|||||
|
dλi dλ j |
|
|
|
|
поэтому
σi |
ij |
= − |
d 2 |
|
q(λ) |
|
(3. 54) |
|
|
||||||
|
|
|
|||||
|
|
dλi |
2 |
|
|
λ =λ0 |
|
|
|
|
|
|
где λ= {kµ,k ν } или λ=ω - параметры, измеряемые средством разведки.
Соотношение (3.54) справедливо при условии, что сигнальная функция по соответствующему параметру имеет по крайней мере две первые производные. Если q(λ) или ее производная недифференцируемы в окрестности истинного значения вектора параметров, то, как показано в [21] дисперсии оценок определяются значениями помеховых функций в точке истинных значений этого вектора параметров.
Из (3.54) непосредственно следует, что
|
Q |
. |
. |
|
|
* |
|||
qc = |
∫∫ F(t − r / c) F(t − r / c) * exp{− j[∆ω − ∆q(t)]t}exp{− j[∆k(t)r)t]}d 2 rdt (3.55) |
|||
No |
||||
|
L T |
|
||
Используя (3.53) в (3.54) и учитывая, что дисперсии оценок частот k и ω тождественны дисперсиям оценок, входящих в (3.54) разностей ∆k и ∆ω можно получить соотношения для дисперсий σk2 и σµ2. Но входящие в (3.54) интегралы по t и г не выражаются в явном виде без дополнительных предположений о форме огибающей F(t), о частотных сдвигах ∆q(t) и ∆k(t), определяемых характером относительного движения разведывательного ИСЗ объекта разведки, а также без конкретизации формы раскрыва приемной антенны средства разведки. Поэтому для оценки предельных точностей разведки временной и пространственной частот можно ограничиться рассмотрением следующих частных случаев. Для прямоугольного раскрыва приемной антенны размерами L=l*l, входящий в (3.55) входящий в (3.55)
|
|
|
l 2 |
= |
S 2 |
|
|
|
|
|
|
|
|
|
|
интеграл по раскрыву дает |
|
|
a |
где Sa – площадь раскрыва антенны. В силу симметрии пределов |
|||||||||||
12 |
12 |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
∆k l |
|
|
|
∆kµ l |
|
||
1/ 2 |
1/ 2 |
|
|
|
|
|
sin |
ν |
|
sin |
|
|
|
||
|
|
|
|
|
2 |
2 |
|
|
|||||||
интеграл равен ∫ |
∫ exp{− j(∆k(t)r)}d 2 r = |
|
|
|
|
|
(3.56) |
||||||||
∆kν l |
|
|
∆kµ l |
||||||||||||
−1/ 2 −1/ 2 |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
2 |
|
|
|
2 |
|
|
|
где ∆k ν ∆k µ - проекции разности волновых векторов на соответствующие оси связанной системы O'v µ.
|
π |
|
1 |
4 |
S 2 |
|
||
Для круглого раскрыва антенны |г|<=0,5 интегрирование по раскрыву дает |
|
|
|
|
= |
a |
, где Sа - как и |
|
2 |
2 |
2π |
||||||
|
|
|
|
|
||||
прежде, площадь раскрыва антенны, а
|
I |
|
1 |
∆k |
2 |
+ ∆k |
2 |
|
|
|||
1∫/ 2 1∫/ 2 |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|||||||
exp{− j(∆k(t)r)}d 2 r = |
1 |
2 |
ν |
|
µ |
|
(3.57) |
|||||
|
|
|
1 |
|
2 |
|
2 |
|
|
|
||
−1/ 2 −1/ 2 |
|
|
|
|
|
|
∆kν |
+ ∆kµ |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||

где I1(-) - функция Бесселя первого рода мнимого аргумента.
При узкополосном сигнале объекта разведки комплексную огибающую можно считать постоянной по времени, а ее нормированную форму F(t)==l. Тогда из (3.55) следует оценка дисперсий временных и пространственных частот, измеряемых средствами разведки:
σ ∆2k ≥ NoQ SaL(∆k)I (T );
(3.58)
σ ∆2ω ≥ NoQ SaL(∆k)I (T )
T / 2
где I(T)= ∫exp{− j[∆ω −∆q(t)t]}dt , a Q ни что иное, как энергия сигнала, собранного раскрывом
−T / 2
площадью Sa; L(∆k) - функция формы и (или) размеров раскрыва приемной антенны средства разведки, определяемая соотношениями (3.56) и (3.57), дальность до разведывательного ИСЗ в (3.127) принята равной высоте геостационарной орбиты (=36000км).
Дисперсия оценки частоты ω оказывается, как видно из (3.58), минимальной при L(∆k)=max и при ∆q(t)=0. Но L(∆k)=l при отсутствии взаимного движения объекта и средства разведки. Последнее характерно, например, при размещении средства разведки на борту стационарного ИСЗ. В этом случае
σ ω2 ≥ |
No12 |
0.2 *1018 |
No |
рад/ c |
(3.59) |
|
QSaT |
PиизлSa 3 |
|||||
|
|
|
|
где Рдзд - мощность излучаемого сигнала.
Дисперсия оценки пространственной частоты будет не меньше, чем
|
|
|
|
∆ωt |
|
|
|
|
|
σ ∆2k ≥ |
No |
sin |
2 |
|
0.32 *1018 |
No |
км2 |
|
|
|
|
|
(3.60) |
||||||
|
∆ωt |
PиизлSa 3 |
|||||||
|
QSa |
|
|
|
|
||||
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а учитывая связь пространственной частоты с геометрическими координатами объекта разведки |к|=(1/2π)(ρ-R)/r, можно установить, что дисперсия оценки модуля координатного вектора
σ R2 ≥10 |
24 Noλ2 |
км. |
(3.61) |
|
|
PиизлS |
|||
|
|
|
|
|
Определенная таким образом σ2R - это дисперсия шумовой ошибки оценки координат конца вектора R точки расположения излучающего объекта разведки на поверхности Земли. Для стационарного ИСЗ из от могут быть получены среднеквадратические ошибки измерений каждой из координат:
σ =σ |
|
=σ |
|
=σ |
|
|
0,57 |
|
*10 |
12 λ |
No |
км (3.62) |
ч |
н |
я |
≥ |
|
|
|
|
|||||
|
|
|
|
0,64 |
|
|
I |
Pиизл |
|
|||
|
|
|
|
|
|
|
|
|
|
Коэффициент 0,57 относится к прямоугольному (квадратному) раскрыву приемной антенны космического средства разведки, а 0,64 к круглому.
Глава 4. КАЧЕСТВО ВЫДЕЛЕНИЯ СООБЩЕНИЙ СРЕДСТВАМИ РАДИОРАЗВЕДКИ
4.1. Перехват аналоговых сообщений
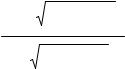
Качеством даже возможность выделения аналогового речевого сообщения приемником средства разведки определяется соотношением сигнал/шум в полосе сигнала, т.е. в полосе акустического канала, оканчивающегося слуховым аппаратом оператора средства радиоразведки. Критерием качества приема при этом считается вероятность правильного узнавания слова оператором. Эта вероятность нелинейно зависит от соотношения сигнал/шум. Экспериментальная зависимость разборчивости речи измеряется вероятностью правильного узнавания слова, от соотношения сигнал/шум в канале приведена на рис.4.1
[25].
Аппроксимация кривой разборчивости речи (рис. 4.1) дается соотношениями:
1 |
− 0.242q−0.325 , q ≥ 0.025 |
|
W (q) = |
50q1.5 |
(4.1) |
|
, q < 0.025 |
|
Считается, что для удовлетворительной разборчивости речи необходимо обеспечить W=0,2. Как видно из рис.4.1, этому условию отвечает соотношение сигнал/шум на уровне q=0,026. В дальнейшем для определения порогового сигнала используются обе величины: пороговая вероятность для разборчивости W=0,2 и пороговое соотношение сигнал/шум q=0,026.
В радиоканале утечки информации (перехвата) действует сигнал s(t), модулированный сообщением x(t). Считается, что сообщение (модулирующая функция) нормировано к единице |x(t)|<=l. Спектр сообщения сосредоточен в полосе fx e (0;Fmax]. Это сообщение модулирует несущее колебание частоты fo. Модулированный сигнал S(x(t)). Ширина спектра сигнала не уже полосы сообщения. Средняя мощность сигнала на входе приемника средства разведки Рс, а мощность шума Рш. Поэтому что соотношение сигнал/шум, приведенное ко входу приемника, q = Рс/Рщ . Кроме того, считается, что шум имеет равномерную спектральную плотность Ni = Pc/∆f в полосе ∆f, занятой спектром сигнала.
Относительно способа модуляции считается, что сигнал s(t) модулирован сообщением по амплитуде, либо по аpгументу (по фазе или частоте).
При обычной AM:
S(t)=a[l+mамx(t)]cos 2πf0t. |
(4.2) |
Ширина спектра сигнала в два раза больше ширины спектра модулирующей функции:
∆fам = 2Fmax |
|
При балансной модуляции (БМ) |
|
S(t)=ax(t) cos 2πf0t |
(4.4) |
а ширина спектра такая же, как и при обычной AM: ∆fбм = ∆fам = 2Fmax |
(4.5) |
При амплитудной модуляции с одной боковой полосой (ОБП) спектр сообщения переносится из полосы (0;Fmах] в полосу (fo; fo + Fmах] или (fo; fo-Fmax], поэтому ширина спектра модулированного сигнала принимается равной ширине спектра сообщения
∆fобп = Fmax |
(4.6) |
При фазовой модуляции (ФМ) сигнал представляется |
|
S(t) = а соs [2πf0t + mфм х(t)], |
(4.7) |
а ширина спектра определяется как шириной спектра модулирующей функции, так и фазовой модуляции mфм . При частотной модуляции
S(t) = а соs [2πf0t + 2πfд ∫t |
x(θ )dθ ], |
(4.8) |
0 |
|
|
где fд - девиация частоты. Индекс модуляции при ЧМ mчм = fд/Fmax, а ширина спектра
∆fчм = 2(fд + F max)= 2(mчм +1)F max (4.9)
т.е. при малых индексах модуляции mчм <1 ∆fчм = ∆fам а при больших mчм >>1 ∆fчм =2fд>>2 Fmax. Считается также, что приемники для выделения сообщения x(t) реализуют оптимальные алгоритмы демодуляции сигнала s(t). Оптимальный в том смысле, что любой технически реализуемый, а тем более реальный приемник, не может обеспечить лучшего воспроизведения сообщения.
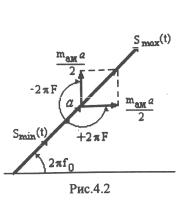
Полученные при таких условиях оценки качества воспроизведения сообщения оказываются верхними, оптимистическими для разведки и пессимистическими для системы маскировки: реальный приемник средства разведки может работать только хуже оптимального. Все модификации способа амплитудной модуляции (обычная AM, БМ и ОБП) относятся к классу линейных: сигнал s(t) линейно зависит от сообщения x(t) [26]. Геометрическая иллюстрация термина "линейная модуляция" представлена на рис.4.2.
В процессе модуляции конец вектора сигнала s(t) перемещается по направлению вектора немодулированного колебания и вращается вокруг начала координат с угловой скоростью 2πfo. Две компоненты с амплитудами mамa/2 и противоположными фазами 2πf t относительно
фазы несущего колебания, синхронно вращаются в разные стороны, так что сумма трех компонент с модулями соответственно а, 0,5 mамa и 0,5 mамa всегда синфазна с вектором немодулированного колебания. Конец вектора в процессе модуляции s(t) скользит по направлению, заданному аргументом 2πfot Полная мощность сигнала
Pc = |
1 |
T∫ s2 (t)dt |
(4.10) |
|
|||
|
T 0 |
|
|
распределена между зависящими от сообщения (информационными) компонентами и спектральной составляющей на частоте несущего колебания. При AM из (4.2) и (4.10) следует, что
Pc = |
a2 |
(1+ mам2 |
)= Po + Pomам2 |
(4.11) |
|
||||
2 |
|
|
|
|
где Рo - мощность на несущей, равная мощности немодулированного колебания (сигнала при x(t)=0); mам2 - суммарная мощность в боковых полосах (именно эта мощность переносится на выход демодулятора AM колебания). При балансной модуляции
Pc=а2/2= Рo |
(4.12) |
и это отражает очевидный факт, состоящий в том, что при БМ мощность на несущей равна нулю (если только модулирующая функция, как при передаче речи, не содержит постоянной составляющей) и вся мощность сигнала сосредоточена в боковых полосах спектра.
При передаче с ОБП вся мощность сигнала приходится на информационные спектральные компоненты, как и при БМ. Но ширина спектра сигнала при ОБП в два раза уже, чем при простой AM и при БМ, т.е. ширина спектра сигнала равна (примерно) ширине спектра сообщения. Поскольку спектр шума в полосе приемника равномерный, при фиксированной мощности передатчика соотношение
сигнал/шум на выходе демодулятора сигнала с ОБП будет в 2 раза больше, чем при БМ и 2 / mам2 раз
больше, чем при обычной AM. Но если нормируется не мощность передатчика, а соотношение сигнал/шум на входе приемника, то следует считать, что соотношение сигнал/шум на выходе демодулятора при БМ и при ОБП будет одинаковым.
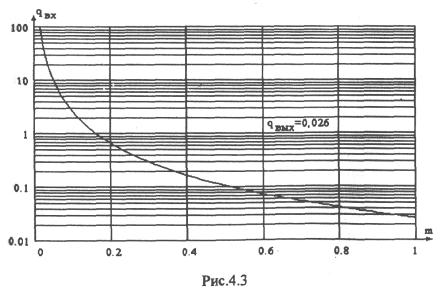
Линейность связи x(t) и s(t) принципиально допускает линейность оператора демодуляции. Именно так строятся оптимальные демодуляторы сигналов с AM, БМ и ОБП. Поскольку при линейных преобразованиях не происходит подавление сигнала шумом, в результате оптимальной демодуляции (в принципе) не изменяется соотношение сигнал/шум. Следовательно, учитывая (11) и (12), можно построить следующую обменную диаграмму между входным приемника радиоразведки и коэффициентом глубины AM при фиксированном соотношением сигнал/шум на выходе демодулятора q вых. Эта диаграмма п координатах qвх-mам представлена на рис.4.3 для определенного выше порогового соотношения q вых=0,026.
Модуляциям ОБП и БМ соответствует точка m=1, q вх=0,026 на диаграмме рис. 4.3.
По диаграмме рис 4.3 для известного значения коэффициента глубины модуляции m определяется пороговое соотношение сигнала сигнал/шум на входе (в полосе приёмника радиоразведки), при котором обеспечивается выходное соотношение сигнал/шум не ниже минимального для обеспечения разборчивости речи.
Все полученные результаты справедливы в предположении о линейности демодулятора, работающего без подавления, т.е. не увеличивающего уровень выходного шума по сравнению со входным. Это утверждение является довольно сильной идеализацией по следующим причинам.
1. Линейный демодулятор - это синхронный детектор, использующий перемножение входного принятого сигнала, наблюдаемого в аддитивной смеси с шумом, опорным колебанием, когерентным составляющей на несущей частоте. Для формирования такого когерентного колебания необходим следящий фильтр. Обычно в качестве такого фильтра используют ФАПЧ. Но система ФАПЧ не может иметь бесконечно узкую полосу. Следовательно, сформированное им опорное колебание непременно
будет содержать шумовую компоненту с мощностью |
|
Pш оп=N∆fш |
(4.13) |
где ∆fш - эквивалентная шумовая полоса системы ФАПЧ.
Этот шум статистически независим от выходного шума демодулятора и, следовательно, складывается с ним по мощности, уменьшая тем самым выходное соотношение сигнал/шум:

|
|
|
|
|
Pc |
|
Рш.оп |
|
∆fш |
|
||||
qвых |
= |
|
|
|
|
qшвх 1− |
|
|
|
= qшвх 1− |
|
|
(4.14) |
|
|
Pш |
+ Рш.оп |
Рш |
|
|
|||||||||
|
|
|
|
|
|
|
|
F max |
|
|||||
в меру соотношения |
|
|
|
∆fш |
|
шумовой полосы ФАПЧ и ширины спектра сообщения. |
||||||||
|
|
F max |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
2. Сам синхронный детектор технически |
невозможно |
выполнить |
в виде идеального |
|||||||||||
перемножителя. Обычно перемножитель двух колебаний u1(t) и u2(t) работает в соответствии с правилом
u1(t) u2(t)=0.25[(u1(t) + u2(t))2-( u1(t) - u2(t))2 |
(4.15) |
т.е. по схеме (рис.4.4).
В частности, подобные технические решения применяют при использовании в качестве фазовых детекторов балансных перемножителей, фазовых детекторов, интегральных перемножителей на основе дифференциальных каскадов.
Если схемы возведения в квадрат неидентичны, после выходного вычитающего устройства не будет полной компенсации случайных (шумовых) компонент, образованных биениями сигнала с шумом на
нелинейностях квадраторов. Этот эффект проявляется тем сильнее, чем меньше соотношение сигнал/шум на входе. Если считать, что обычная инструментальная точность возведения в квадрат составляет порядка 5% (это характерный уровень приведенной погрешности хорошего квадратичного вольтметра), то разница погрешностей двух независимых квадраторов будет в √2 раз больше, т.е. примерно 7%. На эти 7% увеличится мощность флуктуационной составляющей шума
на выходе перемножителя (синхронного детектора). Соответственно на эту же величину уменьшится выходное соотношение сигнал/шум.
3.В спектре балансно-модулированного сигнала отсутствует составляющая на несущей частоте. Поэтому для демодуляции такого колебания необходимо применять специальные схемы восстановления несущей. Такие схемы используют нелинейные преобразования входного процесса. Но нелинейные преобразования всегда сопровождаются подавлением сигнала шумом.
4.Демодулятор сигнала с ОБП - это смеситель, переносящий спектр входного колебания из окрестности частоты несущего fo в полосу сообщения (0;Fmах]. Для реализации возможности такого переноса обычно в спектре сигнала с ОБП оставляют несущую, пропорционально уменьшая тем самым мощность сигнальных составляющих. Кроме того, при демодуляции колебаний с ОБП возможны подавления слабого сигнала шумом на нелинейностях смесителя. Но эти эффекты поддаются учету только для конкретных схем демодуляторов и структур модулированного сигнала.
5.Если вместо синхронного детектора, оптимального для выделения сигнала с линейной модуляцией из шума, используется амплитудный детектор, демодуляция принципиально будет
сопровождаться подавлением слабых сигналов, когда qвх<l. Известно [26], что амплитудный детектор при слабых сигналах хорошо описывается моделью квадратичного преобразования входного колебания.
Впроцессе такого преобразования образуются дополнительные флуктуационные составляющие, мощность которых добавляется к мощности шума и уменьшает выходное соотношение сигнал/шум. В [26] показано, что для квадратичного детектора справедливо соотношение (в наших обозначениях)
qвых = |
qвх2 |
(4.16) |
1+ 2qвх |
При слабых сигналах, когда qвх <l, из (4.16) следует, что qвых= qвх2 . В противоположной ситуации
при qвх >>1 соотношение (4.16) дает qвых= qвх/2,т.е. в 2 раза меньше, чем на выходе линейного (и синхронного) детектора. Этот эффект можно объяснить тем, что при квадратичном детектировании
сигнал выносит помеху на участки характеристики с большей крутизной. При этом влияние помехи увеличивается, а выходное соотношение сигнал/шум падает, хотя и не так быстро, как при слабых сигналах.
Соотношение (4.16) получено в предположении, что на квадратичный детектор вместе с узкополосным нормальным шумом действует немодулированный синусоидальный сигнал. Но его можно полностью и точно распространить на случай детектирования прямоугольных радиоимпульсов. Наличие