

3.3 Расчет параметров системы регулирования при использовании многоконтурной аср и ее моделирование
В качестве многоконтурной системе примем комбинированную систему регулирования, где в качестве возмущающего воздействия будет выступать «расход воздуха в топку».
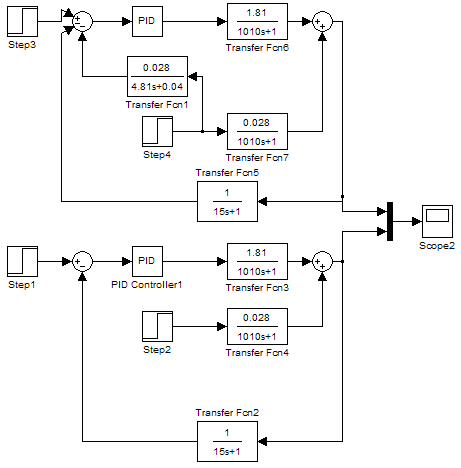
Рисунок 3.5 – Модель системы с возмущением и компенсатором
Для реализации данной системы необходимо ввести в систему контур «инвариантности» по возмущению. Основным элементом в этом контуре является «компенсатор».
 ;
(3.14)
;
(3.14)
Тогда
 ;
(3.15)
;
(3.15)
Получим
 .
(3.16)
.
(3.16)
Промоделируем систему и сравним результаты с системой без компенсатора:
Получим переходные процессы в системе с компенсацией возмущения и без компенсации.
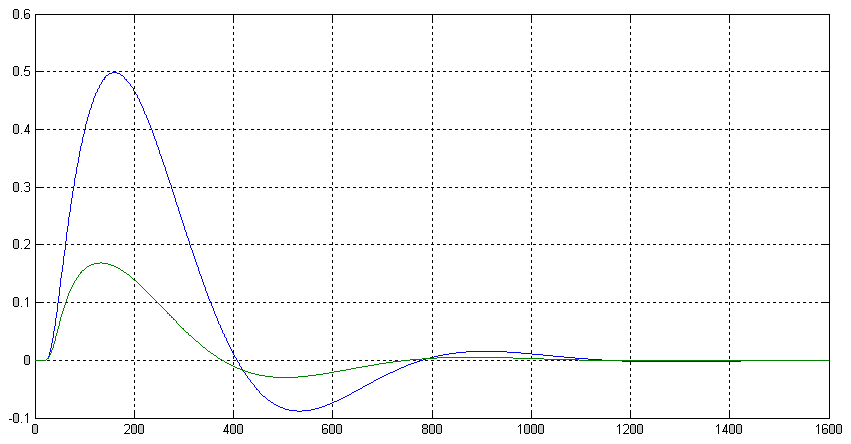
Рисунок 3.6 – Динамика системы регулирования с компенсатором и без компенсатора при воздействии возмущения
Из рисунка 3.6 видно, что рассчитанный компенсатор очень хорошо сглаживает возмущение.
Промоделируем процесс при изменении Kп,,Tи на 10 %. Определим показатели качества переходных процессов.

Уменьш. на 10%
Без компенсатора
Без компенсатора


Рисунок 3.7 – Графики переходных процессов при изменении настроек регулятора на ±10%
При уменьшенных на 10% настройках поведение системы стало лучше – перерегулирование уменьшилось
3.4 Анализ влияния нелинейности и моделирование аср
В реальных условиях технологического процесса необходимо учитывать искажения вносимых нелинейностью. Все реальные системы изначально являются нелинейными; поэтому, когда мы используем линейную модель реальной системы, мы прибегаем к линеаризации того или иного свойства реальной системы.
Метод гармонической линеаризации относится к приближенным методам исследования автоколебаний. Он позволяет определить условия существования и параметры автоколебаний в нелинейных системах практически любого порядка. Этот метод может быть использован также для исследования вынужденных колебательных режимов и приближенной оценки качества переходных процессов.
Метод гармонической линеаризации опирается на исследование поведения системы при гармоническом (синусоидальном) воздействии, подаваемом на вход нелинейного элемента, и замене периодической кривой на выходе нелинейного элемента первой гармоникой. Погрешность, получаемая при такой замене, сравнительно невелика, т.к. в действительности из-за последующего сглаживающего действия линейной части САУ, являющейся своего рода фильтром низкой частоты, все высокочастотные колебания не пропускаются. Практически они подавляются элементами системы, обладающими инерционностью (например, индуктивностью, механическими массами и др.).
Основой метода гармонической линеаризации является предположение о том, что автоколебания приближенно можно искать в синусоидальной форме.
Линеаризация заключается в замене нелинейности на линейную передаточную функцию, в результате чего можно получить модель для случая малых отклонений от рабочей точки. Гармоническая линеаризация применяется в системах с внутренними колебаниями. Для некоторых систем вообще невозможно подобрать адекватный метод анализа и единственная , что остается сделать – это прибегнуть к имитационному моделированию. Однако, учитывая специфику нелинейных систем, даже если применение какого-то метода анализа является оправданным, полученные результаты по возможности должны быть проверенны путем моделирования.
Система с учётом нелинейности выглядит следующим образом:
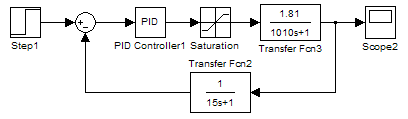
Рисунок 3.8 – Система регулирования с нелинейностью.
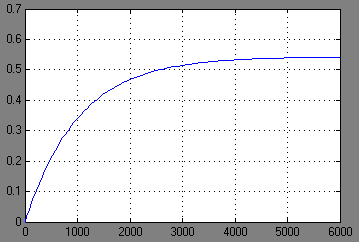
Рисунок 3.9 – Графики переходного процесса системы с нелинейностью.
Выполнив линеаризацию, получили коэффициент усиления K=0,3. Заменив нелинейность коэффициентом усиления, получаем систему вида:
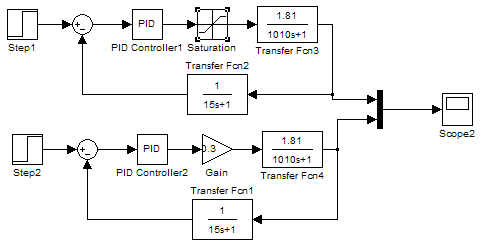
Рисунок 3.10 – Система регулирования с нелинейностью и коэффициентом усиления

Рисунок 3.11 – Сравнение переходных характеристик