

10. Моделирование системы с регулятором положения.
Для решения задачи по перемещению механизма в заданное положение (позицию) применяют системы с регулятором положения. Часто эти системы называют позиционными. К таким системам можно отнести электропривод нажимного устройства, летучих ножниц, манипуляторов и т.д. Структурная схема позиционной системы приведена на рис. 18а. Модель системы в программе АС 3.1 приведена на рисунке 18б.(файл POS1.sa). Внутренние контуры регулирования: контур тока якоря и контур частоты вращения рассмотрены в предыдущих разделах. Остановимся подробнее на внешнем контуре положения и звеньях, входящих в этот контур. Заданное и текущее значения регулируемой координаты обозначены соответственно SЗ и S.

а)

б)
Рис. 18.
Звено № 11 связывает частоту вращения двигателя и угол поворота вала. По характеру – это интегратор без ограничения выходной переменной.
Звено № 12 является коэффициентом связи между углом поворота вала двигателя и регулируемой координатой позиционной системы S. Рассмотрим несколько частных случаев расчета этого коэффициента.
а) Регулируемой координатой является угол поворота вала двигателя. В этом случае kП = 1.Под параметром S следует понимать заданное и текущее значение угла поворота вала двигателя.
б) Регулируется
угол поворота механизма, связанного с
двигателем редуктором с передаточным
числом i.
Обычно i
определяется, как отношение скоростей
или углов поворота входного и выходного
валов редуктора (при этом коэффициент
передачи редуктора![]() ).
В этом случае
).
В этом случае![]() .
.
в) Отрабатывается
линейное перемещение механизма, например
перемещение нажимного винта прокатного
стана, вращаемого электродвигателем
через редуктор с передаточным числом
i.
Введя обозначение шага винта h,
для определения kП
получим выражение:
![]() .
.
В общем случае коэффициент kП следует рассчитывать, исходя из кинематической схемы механизма и его параметров.
Звено № 1 представляет собой передаточную функцию измерительно-преобразующего устройства (ИПУ). Этот элемент системы преобразует рассогласование между заданным и текущим значениями регулируемой угловой или линейной координаты в напряжение соответствующей величины и полярности. В зависимости от того, какой является система регулирования положения: цифровой (дискретной) или аналоговой аппаратная реализация ИПУ может быть различной.
В дискретных системах для контроля перемещения или положения используют импульсные или позиционно-кодовые датчики. Для реализации ИПУ применяют счетчики, сумматоры, цифроаналоговые преобразователи.
В аналоговых системах используют сельсины, поворотные трансформаторы, потенциометры, связанные с валом двигателя или механизма. При необходимости эта связь осуществляется через редуктор. Преобразование переменного напряжения сельсина в постоянное соответствующей величины и полярности производится с помощью фазочувствительного выпрямителя.
В модели ИПУ аппроксимировано апериодическим звеном. В ряде случаев инерционностью устройства можно пренебречь и аппроксимировать его безынерционным усилителем с ограничением выхода. Коэффициент звена можно рассчитать по формуле:
![]() ,
,
где U0 – принятый уровень максимального напряжения ИПУ, S0 – соответствующее этому уровню угловое или линейное рассогласование между заданным и текущим значением.
В качестве S0 принимают так называемый минимальный угол (путь) торможения с номинальной скорости до останова, (предполагается, что торможение производится с максимальным отрицательным ускорением). Для расчета используются известные формулы из теории электропривода и теоретической механики.
![]() ,
,
![]()
где ωн – номинальная частота вращения двигателя, ε – угловое ускорение при торможении, J – приведенный к валу двигателя момент инерции, МДТ и Мс – максимальный момент двигателя при торможении и момент статического сопротивления.
Звено № 2 моделирует регулятор положения. В позиционных системах применяют как линейные, так и нелинейные (параболические) регуляторы положения.
В настоящее время для регулирования положения применяются не аналоговые, а цифровые системы регулирования. Регулятором является, как правило, программируемый логический контроллер (ПЛК), преобразующий рассогласование ΔS = Sз – S в задание на скорость электропривода. Если регулирование скорости осуществляется аналоговым регулятором, то контроллер преобразует ΔS в соответствующий уровень напряжения, подаваемого в качестве задания на вход регулятора скорости. При использовании контроллера в качестве регулятора скорости результаты расчета алгоблока регулирования положения являются входными данными алгоблока регулирования скорости электропривода.
При таком подходе в модели звенья 1 и 2 объединяются в один элемент – регулятор положения (контроллер), выполняющий одновременно функции измерительно-преобразующего устройства и собственно регулятора(линейного или параболического).
Из литературы известно [6], что задание на скорость(выход регулятора положения) и рассогласование по положению связана соотношением:
![]()
В этом случае обеспечивается торможение с максимальной интенсивностью и минимальный путь торможения S0 при торможении с номинальной скорости. Значение коэффициента К зависит от размерности ΔS и величины максимального задания на скорость.
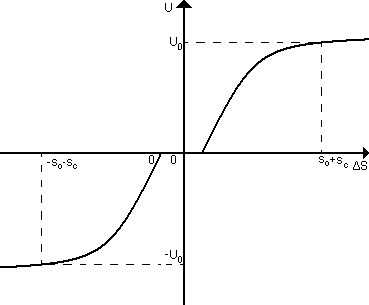
Статическая характеристика регулятора положения приведена на рисунке:

При
ΔS
≤ S0
выход и вход связаны зависимостью
![]() ,
а приΔS
> S0
выход
регулятора постоянен и равен максимальному
заданию на скорость U0,
например 10В
,
а приΔS
> S0
выход
регулятора постоянен и равен максимальному
заданию на скорость U0,
например 10В
Для улучшения работы позиционной системы начальные участки параболы линеаризуются и вводится порог чувствительности регулятора. В этом случае ветви параболы смещаются на величину Sc относительно начала координат и характеристика окончательно выглядит так:
Звенья № 14 и № 15 введены в модель для того, чтобы учесть изменение знака нагрузки в зависимости от направления перемещения.
Контур тока якоря и частоты вращения (скорости) были рассмотрены ранее (звенья 3–10).
Ниже приведены данные модели, взятые из описания механизма и полученные расчетным путем (формулы и расчеты не приведены).
i=50; kП =0,02; MH=83 H*м; MC=20 H*м; kC=0,095; ТДС=0,03с; МДТ=208; kРС=6,6; ε=160; S0=0,7.
![]() ;
;
![]() .
.
В
позиционных системах применяют также
и линейные регуляторы положения.
Коэффициент регулятора можно рассчитать
по формуле:
![]()
Ниже приведены результаты расчета контура положения, в которых использованы данные двухконтурной системы регулирования скорости.

Было задано отработать поворот на 360° без нагрузки. Результаты моделирования представлены на рисунке. График 1 соответствует изменению тока, график 2 отражает изменение скорости при отработке перемещения, изображенного на графике 3. Графики изображены в относительных единицах.