

11. Моделирование моментов нагрузки и задающих воздействий различных типов.
В большинстве приведенных выше примеров моделирования различных САУ ЭП рассчитывались два последовательных режима: разгон на холостом ходу и последующее ступенчатое приложение нагрузки. Для анализа качества системы этих расчетов в общем-то достаточно. Можно оценить величину перерегулирования при отработке задания, колебательность системы, статическое и динамическое отклонение скорости при изменении нагрузки на привод. Реальные условия работы электропривода различных механизмов характеризуются многообразием типов нагрузки. В одних случаях момент нагрузки не зависит существенно от величины скорости и направлен постоянно в одну и ту же сторону, например у грузоподъемных механизмов типа подъемного крана или лифта. В других момент примерно постоянен по величине, но направлен всегда в сторону, противоположную направлению вращения (момент сухого трения или момент прокатки на реверсивном стане в двух последовательных пропусках с равными обжатиями). Для моделирования первого типа нагрузки можно предложить схему рис. 11.1,а. Второй тип моделируется с помощью двух дополнительных звеньев: множительного звена и функции знака. Назначение этих звеньев достаточно ясно из рис. 11.1,б. Поскольку эти звенья не являются моделями реальных устройств, а отражают лишь математические зависимости, ограничения на выход этих звеньев устанавливать не следует. На рисунках 11.1,а-д приведены фрагменты моделей, имеющие значение для моделирования нагрузок.
У некоторых механизмов, при снижении скорости до определенного значения (как правило небольшого), включается механический тормоз. Нагрузка привода при этом становится равной нулю. Промоделировать эту ситуацию можно, введя в схему рис. 11.1,б вместо звена типа 17 звено типа 12. В качестве параметра Нзадается значение скорости, при которой нагрузка обнуляется, а параметрkустанавливается равным 1.
Моделирование нагрузки, линейно-зависящей от скорости и меняющей знак при изменении направления вращения, иллюстрируется рис. 11.1,в. Нагрузка на привод отражается формулой: M = Mс·ω.
При квадратичной зависимости между скоростью и нагрузкой (M = Mс·ω2) можно порекомендовать воспользоваться звеном типа 10, задав ему соответствующие параметры:А= 1,В=С= 0. Фрагмент модели показан на рис. 11.1,г.
Линейное изменение задающего напряжения можно обеспечить с помощью интегратора на входе системы (рис. 11.1,д.). Предположим, необходимо равномерно разогнать привод до номинальной скорости (UЗ=10 В) за 2 секунды. ПриТ= 2 иU=UЗ= 10 выходное напряжение интегратора будет линейно изменяться от нуля до 10 вольт за две секунды и регулятор скорости будет отрабатывать разгон с постоянным ускорением.
Рамки этого пособия не позволяют рассмотреть все многообразие внешних воздействий на САУ. Однако, пользуясь возможностями программы моделирования и проявив определенную изобретательность, пользователь может моделировать работу системы в условиях, достаточно близких к реальным.
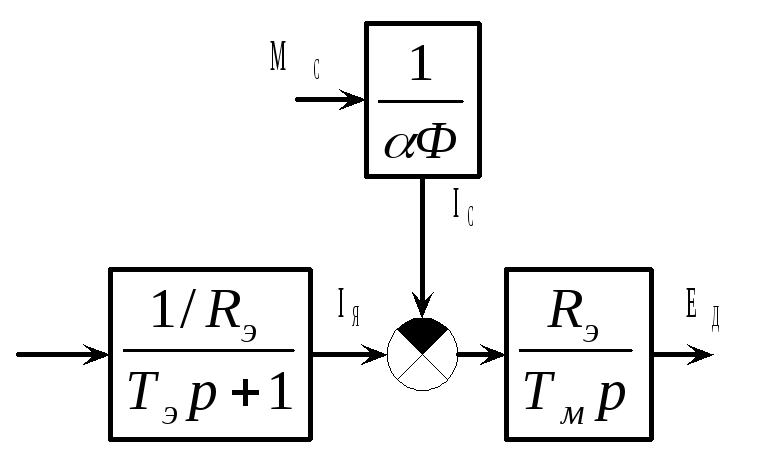
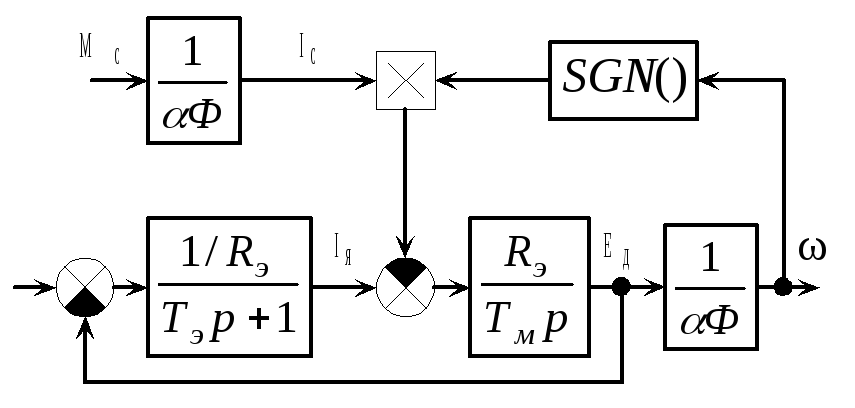
а) Момент не зависит от б) Момент постоянен по величине,
знака и величины скорости. но зависит от знака скорости.
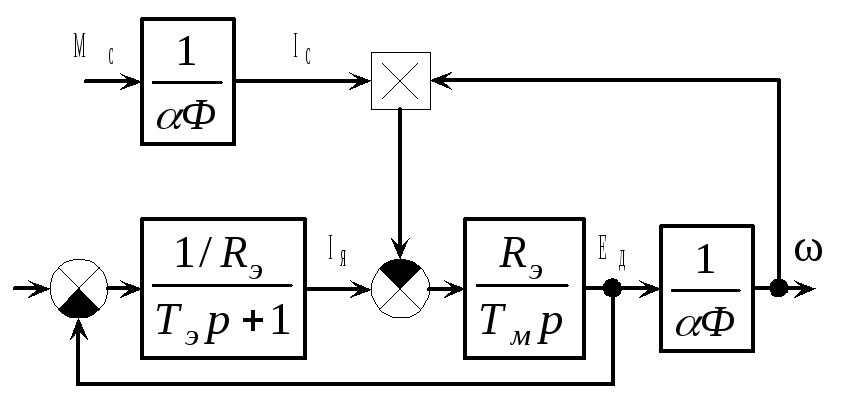
в) Момент пропорционален скорости и зависит от ее знака.
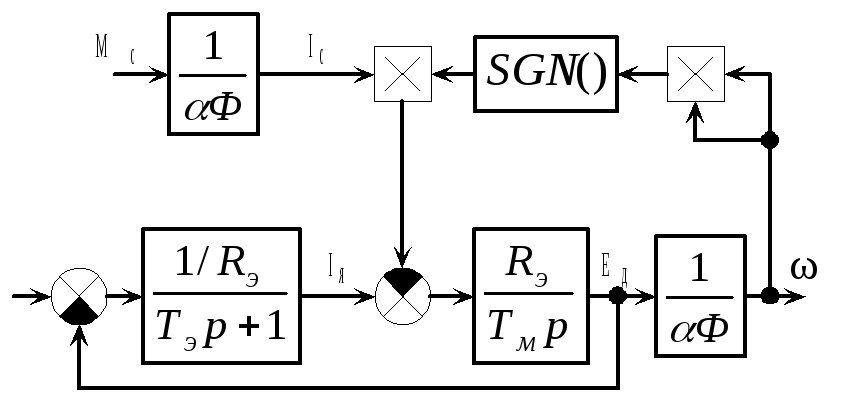
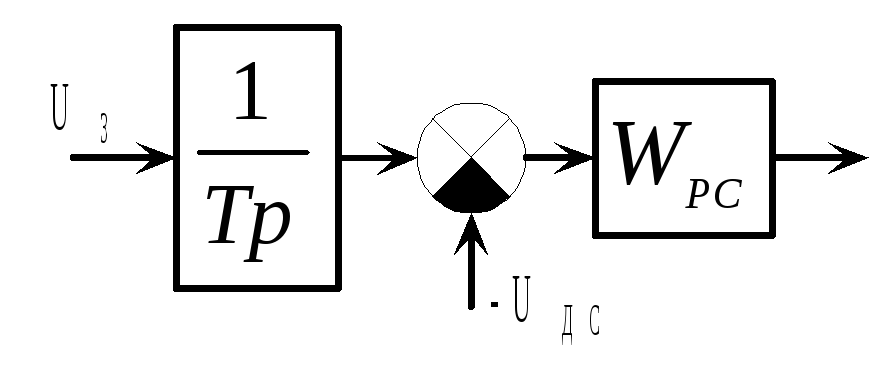
г) Момент пропорционален квадрату д) Линейное изменение
скорости и зависит от ее знака. задания на скорость.
Рис. 11.1. Моделирование различных типов внешних нагрузок.