

6. Пример расчета контура с различными типами объектов.
В общем случае в контур входят: регулятор, объект, содержащий звенья с малыми постоянными времени и, так называемую, компенсируемую часть объекта, а также датчик, измеряющий регулируемую величину. Типовая схема контура регулирования представлена на рис 6.1.

Рис 6.1. Типовая схема контура регулирования.
1) Объект апериодическое
звено
![]() . Пустьxmax=10,ymax=100,
Кoc=10/100=0,1.
. Пустьxmax=10,ymax=100,
Кoc=10/100=0,1.
K0=2T0=0,3c
K1=1
K2=2
Tμ1=0,01c
Tμ2=0,02c
Tμ3=0c
Tμ=Tμ1+Tμ2+Tμ3=0,03
![]()
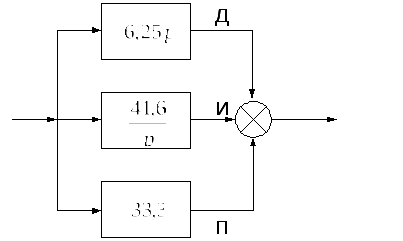
Регулятор моделируется в виде двух параллельных звеньев: пропорционального с коэффициентом KП и интегрирующего с коэффициентомKИ .
![]() ;
;
 .
.
В программе АС3.1 модель контура в файле cont.sa, при учете ограничения выхода регулятора 10В в файлеcontogr.sa(с макросомmc_print.sa).
Моделируется отработка задания х=3 с последующим возмущением F=2. Регулятор с ограничением. Результат на рис.6.2.

Рис. 6.2.
2) Объект интегратор
![]() ,
К0=2,T0=0,3,W0=6,66/p.
,
К0=2,T0=0,3,W0=6,66/p.
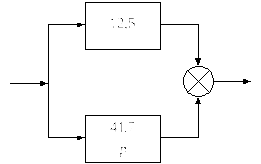
Если использовать П-регулятор, то
![]()
Если взять ПИ-регулятор, то K=12,5, τp = 4Tμ = 4*0,03=0,12.
![]() ;
фильтр
;
фильтр
![]()
Модель контура с интегральным объектом и ПИ-регулятором с ограничением – файл contint.sa(с макросомmc_print.sa). Результат моделирования тех же режимов на рис.6.3.

Рис. 6.3.
3) Объект – инерционное звено 2 порядка
![]()
K0=2
T01=0,3
T02=0,5

![]()
В программе АС3.1 файл ap2.sa, при учете ограничения файлap2ogr.sa(макросmc_pidreg.sa).

Рис. 6.4.
Моделировалось 2 режима:
1) X=3,F=0,τ=4c.
2) X=3,F=2,τ=4c.
Результат моделирования приведен на рис.6.4.
В тексте указаны имена файлов из приложения к электронному варианту пособия, содержащиеся в папке «МОДЕЛИ».
7. Передаточные функции основных элементов сау эп.
Типовая структурная схема системы автоматического управления включает в себя достаточно широкий набор элементов. Сюда относятся регуляторы различных типов, датчики регулируемых параметров, задатчики, функциональные преобразователи, множительно-делительные устройства, тиристорные выпрямители или преобразователи частоты, электродвигатели постоянного или переменного тока, реле, аналого-цифровые преобразователи (АЦП) и т.д.
РЕГУЛЯТОРЫ. Наиболее распространенными являются пропорциональные (П), пропорционально-интегральные (ПИ) и интегральные (И) регуляторы. Реже применяются пропорционально-дифференциальные (ПД) регуляторы. Более сложным является пропорционально-интегрально-дифференциальный (ПИД) регулятор. Параметры регуляторов определяются при оптимизации контуров регулирования САУ.
ДАТЧИКИ. Датчик тока целесообразно моделировать в виде обычного усилителя, т.к. его постоянная времени составляет десятые доли миллисекунды, что позволяет пренебречь ей в инженерных расчетах. Это же относится и к датчику напряжения. Остальные датчики (частоты вращения, ЭДС двигателя, положения, температуры, расхода) моделируются как инерционные звенья первого порядка.
ЗАДАТЧИК ИНТЕНСИВНОСТИ. Для равномерного разгона привода с заданным ускорением применяют задатчики интенсивности разгона. Они являются интеграторами. В современных электроприводах ЗИ применяются не только на входе регулятора частоты вращения, но и на входе регулятора тока, чем обеспечивается заданный темп нарастания динамического тока в приводе. Аналогичные по характеру устройства могут использоваться для формирования задающего воздействия и в других САУ.
ФУНКЦИОНАЛЬНЫЕ ПРЕОБРАЗОВАТЕЛИ. Чаще всего применяется квадратичный преобразователь.
МНОЖИТЕЛЬНО-ДЕЛИТЕЛЬНЫЕ УСТРОЙСТВА. Применяются для моделирования операций умножения и деления, а также в системах двухзонного регулирования скорости электропривода с широким диапазоном изменения потока возбуждения и высокими требованиями к динамике.
ТИРИСТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ. Может моделироваться в виде звена чистого запаздывания. Однако при синтезе систем подчиненного регулирования получила распространение аппроксимация чистого запаздывания инерционным запаздыванием. Поэтому предпочтительней применять модель в виде апериодического звена. Постоянная времени может быть рассчитана по формуле:
![]()
где
![]() – круговая частота;f
– частота промышленной сети; m
– число пульсаций за период.
– круговая частота;f
– частота промышленной сети; m
– число пульсаций за период.
Для f = 50 Гц и m = 3; 6; 12 величина постоянной соответственно будет T=0.0083; 0.0067; 0.0058.
Статический
коэффициент усиления можно определить
по приближенной формуле
![]() ,
,
где Emax и Uу - максимальные значения выпрямленного напряжения и напряжения управления на входе преобразователя.
ЭЛЕКТРОДВИГАТЕЛЬ. В задачи данного пособия не входит подробное рассмотрение и вывод передаточных функций структурной схемы двигателя постоянного тока или асинхронного двигателя. Кроме того, структурных схем этих объектов может быть предложено несколько, в зависимости от принятой схемы замещения. На рис.7.1. представлен один из вариантов структурной схемы двигателя постоянного тока (ДПТ) с независимым возбуждением. На рис.7.1а изображена структурная схема цепи возбуждения. Здесь Тв и Тk - постоянные обмотки возбуждения и вихревых токов, Rв - сопротивление обмотки возбуждения.
На рис.7.1б приведена структурная схема ДПТ при управлении скоростью изменением напряжения на якоре Uя. При моделировании необходимо задать суммарное сопротивление якорной цепи Rа, электромагнитную постоянную Та, электромеханическую Тм и конструктивный коэффициент αФ.

а)

б)
Рис. 7.1. Структурная схема ДПТ