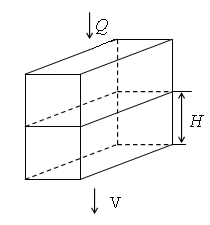
12. Модель кристаллизатора унрс по каналу регулирования уровня
Кристаллизатор
имеет прямоугольное или квадратное
сечение площадью
![]() и высотой
и высотой![]() .
Из промежуточного ковша поступает
металл с секундным объемом
.
Из промежуточного ковша поступает
металл с секундным объемом![]() .
Металл вытягивается тянущей клетью со
скоростью
.
Металл вытягивается тянущей клетью со
скоростью![]() .
Уровень будет постоянен, если объем
поступающего металла равен объему
вытянутого за это же время слитка.
.
Уровень будет постоянен, если объем
поступающего металла равен объему
вытянутого за это же время слитка.
Определим
передаточные функции кристаллизатора
по каналам подачи и вытяжки металла.
Пусть за время
![]() в кристаллизатор поступит объем металла,
равный
в кристаллизатор поступит объем металла,
равный![]() .
За это время уровень металла изменяется
на величину
.
За это время уровень металла изменяется
на величину
![]() .
.
Скорость
изменения уровня
![]() будет равна
будет равна
![]() .
.
В операторной
форме
![]() .
.
Считая входом
![]() ,
а выходом
,
а выходом![]() ,
получим
,
получим
![]() .
.
По каналу вытяжки уровень будет изменяться по очевидному соотношению:
![]() .
.
В операторной форме:
![]() ;
;
![]() .
.
Модель объекта
представлена на рисунке. В неё также
включены упрощенные до инерционных
звеньев привода стопорного устройства,
регулирующего
![]() ,
и тянущей клети, регулирующего
,
и тянущей клети, регулирующего![]() .
.

Здесь
![]() - напряжение управления стопором,
- напряжение управления стопором,![]() ,
,![]() - соответственно коэффициент и постоянная
стопорного устройства,
- соответственно коэффициент и постоянная
стопорного устройства,![]() - напряжение управления приводом,
- напряжение управления приводом,![]() ,
,![]() - коэффициент и постоянная привода
тянущей клети.
- коэффициент и постоянная привода
тянущей клети.
Режим ручного управления при предварительном заполнении кристаллизатора можно промоделировать.
Пусть кристаллизатор
имеет сечение
![]() =10
=10![]() 10
см и высоту 100 см. скорость вытяжки 6
м/мин или 10 см/с. Тогда
10
см и высоту 100 см. скорость вытяжки 6
м/мин или 10 см/с. Тогда![]() =100
=100![]() 10=1000.
Примем
10=1000.
Примем![]() ,
соответствующий этой подаче металла,
равным 8 В. Тогда
,
соответствующий этой подаче металла,
равным 8 В. Тогда![]() .
Аналогично
.
Аналогично![]()
![]() .
Пусть
.
Пусть![]() .
Моделируется 2 последовательных режима:
.
Моделируется 2 последовательных режима:
1.
![]() =0,
=0,![]() =8,
=8,![]() =5
с
=5
с![]() =0,01
=0,01
2.
![]() =8,
=8,![]() =8,
=8,![]() =5
с
=5
с
Первый режим – включение подачи металла, а второй – включение тянущей клети. Результаты на графике:

Регулирование уровня можно осуществлять изменением подачи металла или изменением скорости вытяжки.
Пример расчета аср уровня металла
а) Управление стопором
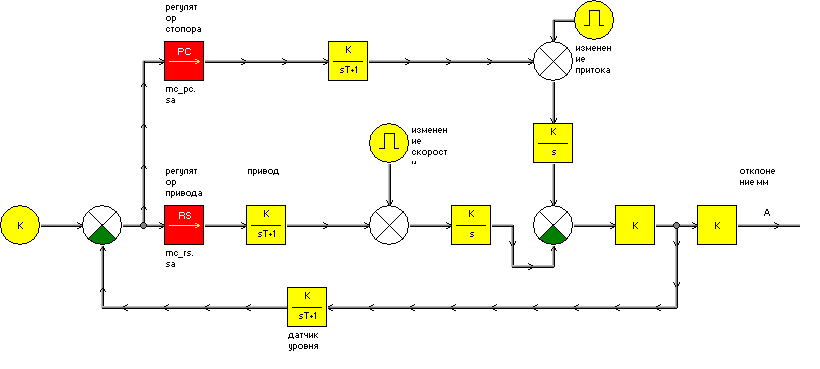
Модель представлена на рисунке 12.1 (KRIST_RQ.sa).
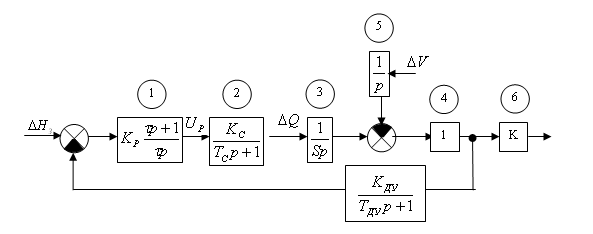
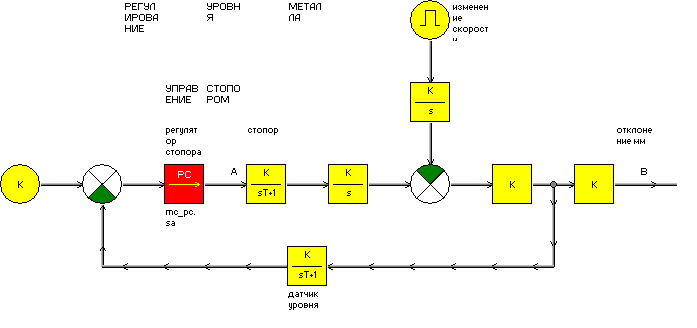
Рис. 12.1. Модель АСР при управлении стопором.
Звено
6 для установления нужной размерности
![]() (здесь
(здесь![]() ,
то есть
,
то есть![]() измеряется
в мм).
измеряется
в мм).
Пусть сечение
кристаллизатора 10см![]() 10
см = 100 см
10
см = 100 см![]() .
Скорость вытяжки 6 м/мин или 10 см/с.
Максимальный приток металла
.
Скорость вытяжки 6 м/мин или 10 см/с.
Максимальный приток металла![]() =100
=100![]() 10
= 1000
10
= 1000![]() .
.
Приток регулируется стопорным исполнительным механизмом, параметры которого определяются по формулам:
![]() ,
,
где
![]() - максимальный выход регулятора,
- максимальный выход регулятора,![]() принять равной 0,1 – 0,5 с.
принять равной 0,1 – 0,5 с.
![]() .
.
Параметры регулятора определяются по формулам:
![]() ,
,
где
![]() - постоянная интегрирования, подлежащая
компенсации,
- постоянная интегрирования, подлежащая
компенсации,![]() - малая постоянная контура,
- малая постоянная контура,![]() - коэффициент датчика уровня.
- коэффициент датчика уровня.
![]() .
.
![]()
![]() .
.
![]()
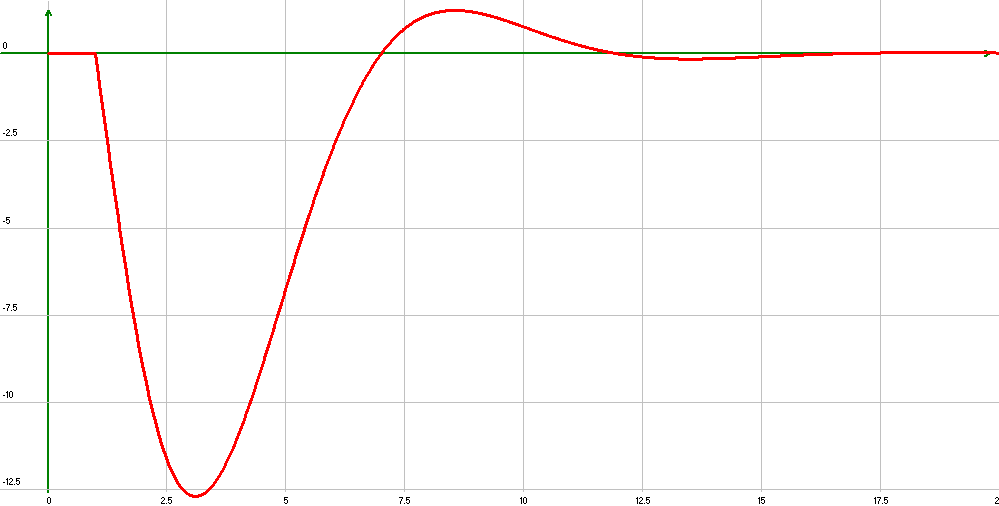
Моделируется 2 режима:
1.
![]() =0;
=0;![]() =0
=0
2.
![]() =0;
=0;![]() =1cм/c(10 %)
=1cм/c(10 %)
Шаг моделирования 0,01 с
Увеличение скорости компенсируется увеличением притока металла. Уровень отклоняется вниз, но потом восстанавливается. Динамическое отклонение около 14 мм.
б) Управление приводом тянущей клети
Модель на рисунке 12.2 (KRIST_RV.sa)


Рис. 12.2. Модель АСР при управлении приводом
В этом случае
исполнительным механизмом является
привод тянущей клети. Примем
![]() =0,3
с,
=0,3
с,![]() =10/10=1
(
=10/10=1
(![]() см/с,
см/с,![]() =10
В).
=10
В).
Тогда
![]() ;
;
![]() с.
с.
![]()
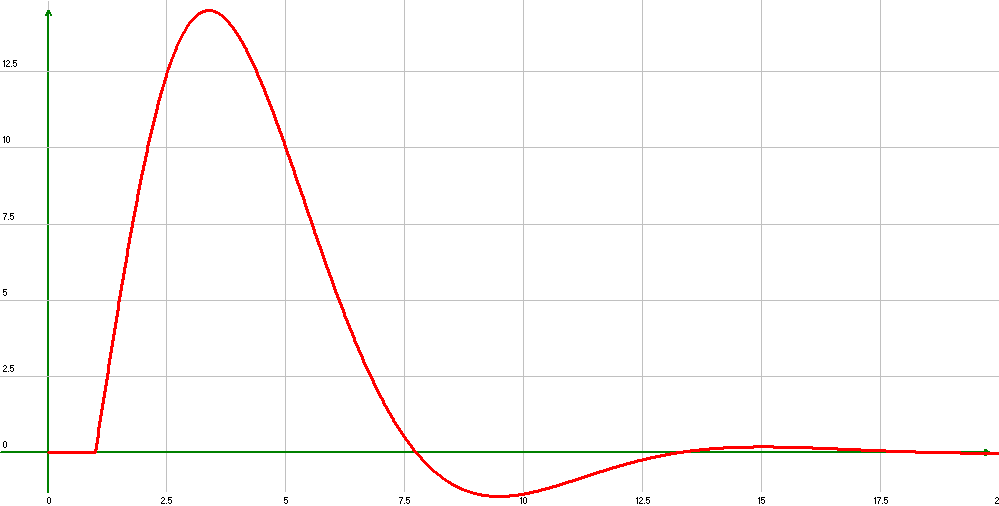
Моделируется 2 режима:
1.
![]() =0;
=0;![]() =0
=0
2.
![]() =0;
=0;![]() =100
(10 %
=100
(10 %![]() )
)
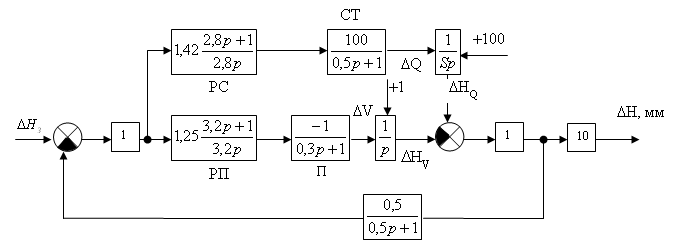
Увеличение притока металла компенсируется увеличением скорости.
Комбинированное управление (KRIST_QV.sa) повышает качество регулирования за счет одновременной работы двух каналов стабилизации уровня. Отклонение уровня при тех же возмущениях составляет около 9мм.