

1. Моделирование на эвм типовых звеньев сау
В состав структурных схем большинства систем автоматического управления (САУ) входит достаточно ограниченный набор типовых звеньев. Наиболее часто встречаются интеграторы, апериодические и дифференцирующие элементы, пропорционально-интегральные регуляторы, реле, функциональные преобразователи, усилители и т.д.
Для того чтобы лучше уяснить роль каждого звена в системе регулирования, необходимо хорошо представлять, как именно преобразуются входные сигналы или воздействия этим звеном системы в соответствующие выходные. В изучении этого вопроса может помочь моделирование реакции типовых элементов САУ на входные воздействия различного типа.
В основу процедуры моделирования многих типовых звеньев положен метод Рунге-Кутта. Применительно к простому интегратору он может быть представлен таким образом:
![]()
![]() ;
;
![]()
В конечных приращениях то же самое можно записать в виде:
![]()
![]()
где
T
– постоянная интегрирования звена; Xn,
Yn
– соответственно вход и выход звена на
n-м
шаге расчета;
![]() t
– величина интервала времени, в течение
которого входное воздействие считается
постоянным.
t
– величина интервала времени, в течение
которого входное воздействие считается
постоянным.
Суммирование
(интегрирование) выходного параметра
производится через интервалы времени
![]() t=S,
в связи с чем этот интервал получил
название шаг
интегрирования S
(в дальнейшем использовано обозначение
S).
t=S,
в связи с чем этот интервал получил
название шаг
интегрирования S
(в дальнейшем использовано обозначение
S).
Блок-схема программы, моделирующей простейший интегратор, представлена на рис.1.1. При моделировании более сложных звеньев, таких, как апериодическое, пропорционально-интегральное, дифференциальное и т.д., используется то обстоятельство, что сложные звенья могут быть представлены в виде комбинации простейших: интеграторов и безынерционных усилителей. На рис.1.2 представлены структурные схемы апериодического, реального дифференцирующего и пропорционально-интегрального звена. По аналогии разработаны процедуры для колебательного, пропорционально-дифференциального и других типов звеньев.
При разработке подпрограмм моделирования нелинейных элементов САУ (реле, АЦП, квадратичный преобразователь, люфт, делительные и множительные устройства) учитывается логика работы данного устройства и аналитическая зависимость между его входом и выходом.

Рис. 1.1. Упрощенная блок-схема расчета интегратора.
Для моделирования могут применяться различные пакеты программ, в частности «Анализ систем 3.1» (АС 3.1), МВТУ, Simulink и др.

Апериодическое звено первого порядка

Реальное дифференцирующее звено

Пропорционально-интегральное звено
Рис.1.2. Структурные схемы некоторых типовых звеньев.
2. Модели и передаточные функции простых объектов.
1. Гидравлический демпфер.
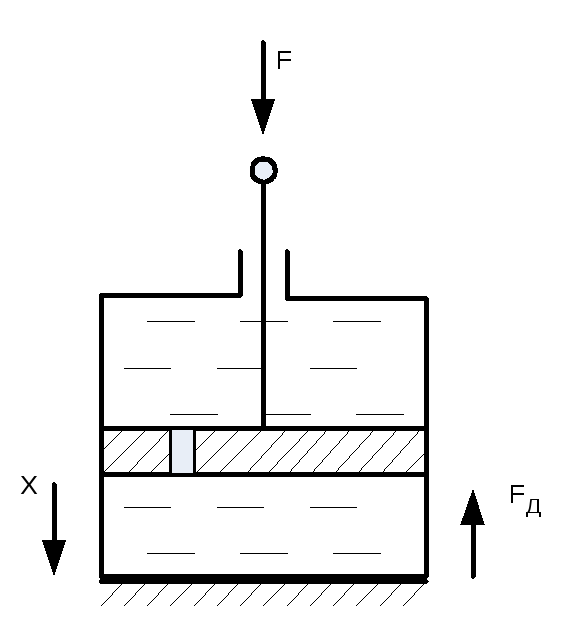
![]() ,
,
где С – коэффициент демпфирования, пропорциональный вязкости жидкости, площади поршня и обратно пропорциональный площади отверстия. Массой движущихся частей пренебрежем.
![]() ;
;
![]() .
.
Объект является интегратором с ограничением по Х.
2. Гидравлический демпфер с пружиной.

![]() ,
,
С1 – коэффициент демпфирования,
С2 – коэффициент упругости пружины (массой движущихся частей пренебрежем).


![]() ;
;
![]() .
.
Объект является апериодическим звеном.
Если учесть массу движущихся частей, приведенную к точке А, то будет:
![]()

![]() ,
,
где
![]() .
.
В
зависимости от соотношения Т1
и Т2
объект представляет собой либо
апериодическое звено второго порядка
(![]() ),
либо колебательное звено(
),
либо колебательное звено(![]() ).
).
Пассивные корректирующие устройства
(пассивные электрические цепи).
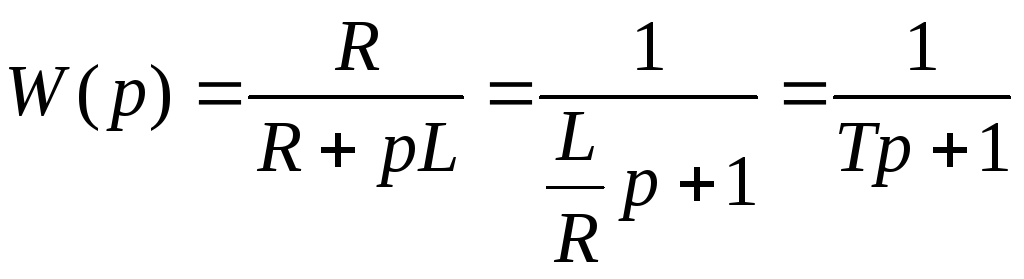
Общая
формула для W(p):
![]() .
.


где
![]() .
.
Объект является реальным дифференцирующим звеном.

где
![]() .
.
Объект является апериодическим звеном.


где T = RC.
Объект является реальным дифференцирующим звеном.


где T = RC
Объект является апериодическим звеном.


где
T1=RC,
![]()
Объект является звеном второго порядка.
При
![]() — апериодическое звено второго порядка.
— апериодическое звено второго порядка.
При
![]() — колебательное звено.
— колебательное звено.
Можно записать в виде
![]()
где
![]() ;
;
При
![]() — колебательное звено.
— колебательное звено.
При
![]() —
апериодическое звено второго порядка.
—
апериодическое звено второго порядка.

![]()


Объект представляет собой реальное ПД-звено или форсирующее звено с инерционностью.