

Глава 18. Микропроцессорные средства управления электроприводами
18.1. Состав и архитектура микропроцессорных систем
Микропроцессор (МП) - это программно управляемое устройство, предназначенное для обработки цифровой информации и управления процессом этой обработки, реализованное на одной или нескольких больших интегральных схемах БИС; другими словами, МП – это стандартное универсальное устройство, позволяющее реализовать приём, обработку и передачу цифровой информации.
Микропроцессорная система (МПС) – это совокупность взаимосвязанных устройств, включающая один или несколько (МП), память (ЗУ), устройство ввода-вывода и ряд других устройств, предназначенных для выполнения некоторых чётко определённых функций.
Микроконтроллер (МКО) – устройство, выполняющее функции логического анализа (сложные последовательности логических операции) и управления; реализуемое на одной или нескольких БИС. МКО – это микропроцессорное устройство, в котором за счёт сокращения функций по выполнению арифметических операций можно уменьшить его аппаратную сложность и развить функции логического управления.
Микропроцессорный комплект интегральных схем (МПК ИС) – это совокупность микропроцессорных БИС (базовый МПК) и других ИС, однотипных по конструктивному, технологическому исполнению, для которых обеспечена функциональная, структурная, информационная и энергетическая совместимость при использовании МПС.
Структура и взаимосвязь основных средств микропроцессорной техники (МТ) в рамках микропроцессорных автоматических систем (МПАС) показана на рис.18.1.
МП включает арифметико-логическое устройство (АЛУ), устройство управления (УУ) и блок регистров (БРГ), в который входят регистры: аккумулятор, адреса, флаговые, состояния, программный счётчик, общего назначения, стековые и т.д.
МПС включает помимо МП (одного или нескольких), оперативное и постоянное ЗУ (ОЗУ и ПЗУ), устройства ввода-вывода (УВВ), ряд других устройств.
Взаимодействие частей МПАС осуществляется посредством шин: адресной (ША), данных (ШД), и управления (ШУ), связывающих в единую систему компоненты МПС, а также шин измерения, контроля и управления, которые совместно с соответствующими устройствами связи с объектом (процессом) обеспечивают непосредственное взаимодействие МПС с управляемым объектом или процессом.
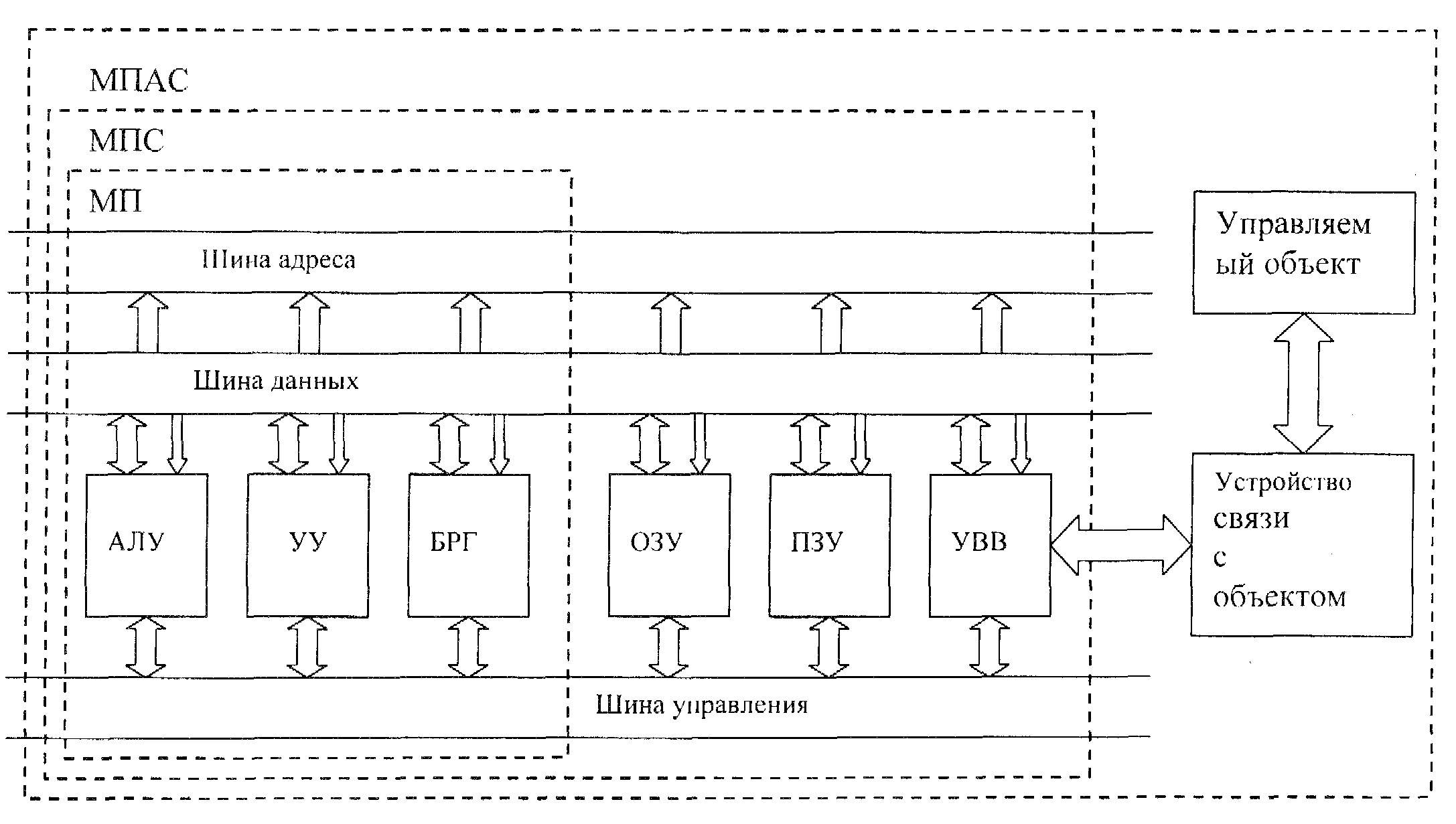
Рис. 18.1. Структура микропроцессорной автоматической системы МПАС
МПС могут быть конструктивно подготовлены для работы с человеком-оператором, т.е. иметь каркас, панель управления и другие необходимые компоненты – в этом случае её называют микро-ЭВМ. МПС могут предназначаться для агрегатирования, т.е. для работы в конструктивно и функционально едином комплексе аппаратуры.
В последнем случае речь идёт о реализации распределённых средств управления обработки информации в рамках МПАС. Распределённость здесь означает, прежде всего, расчленение (декомпозицию) общего алгоритма управления на ряд параллельных или последовательно реализуемых алгоритмов, не связанных насколько это возможно друг с другом во времени, и, кроме того, оптимальное пространственное распределение процессов управления и обработки информации путём встраивания средств МТ непосредственно в датчики, регулирующие исполнительные и другие устройства [3-10].
При этом более эффективно решаются задачи обеспечения быстродействия, надёжности, живучести, сокращения размеров и уменьшения массы средств автоматического управления, регулирования, контроля и сбора данных. Характерные свойства МП дают возможность встроенного управления каждой отдельной единицей аппаратуры, оборудования, что обеспечивает создание полностью автоматизированных локальных систем и процессов.
Проектирование сложной технической системы предполагает расчленение её на некоторые функционально законченные подсистемы. При этом важно иметь общее представление о структуре, как системы в целом, так и отдельных её подсистем. В случае использования в системе МП средств немаловажно установить взаимосвязь структуры с соответствующим алгоритмическим обеспечением. В сложных системах, например в системе управления промышленного робота, в качестве подсистем принято выделять иерархические уровни управления [3-14].
На примере робототехнической системы рассмотрим разделение общей задачи управления действиями робота на несколько самостоятельных подзадач или уровней управления. В общем случае принято выделять три иерархических уровня управления: исполнительный, тактический и стратегический.
На нижнем (исполнительном) уровне осуществляется управление приводами подвижных звеньев исполнительного механизма робота. При этом основная задача управления заключается в расчёте и выдачи на системы управления приводами таких сигналов, которые обеспечивают качественное исполнение законов движения по отдельным степеням подвижности робота.
На втором (тактическом) уровне вычисляются законы согласованного движения звеньев исполнительного механизма робота, обеспечивающие целенаправленное перемещение его рабочего органа по некоторой траектории, задаваемой вышестоящим уровнем управления.
На третьем (стратегическом) уровне планируется траектория движения рабочего органа ПР (промышленного робота), соответствующая выполнению роботом предписываемой ему технологической операции.
Ещё один важный аспект, характеризующий общую структуру системы управления ПР, связан с особенностями организации вычислительно-логического блока.
В последние годы наметилась тенденция к использованию принципа децентрализованного управления при построении систем управления ПР. Вычислительно-логический блок в таких системах реализуется с помощью нескольких микро-ЭВМ или МП модулей, на каждый из которых возлагается решение самостоятельной задачи.
Очевидное преимущество децентрализованного управления в возможности параллельного ведения вычислительного процесса, а значит, в расширении возможностей системы управления за счёт решения более сложных задач в реальном масштабе времени по сравнению с системами централизованного управления. Кроме того, использование автономных контролеров для каждого из приводов позволяет улучшить качество процессов управления за счёт повышения частоты выдачи управляющих сигналов на аналоговую часть приводов.
Все МП можно разделить на два типа:
однокристальные МП с фиксированной разрядностью слова и фиксированной системой команд;
многокристальные МП с изменяемой разрядностью слова и микропрограммным управлением.