

ватели электрической энергии постоянного и переменного тока. В зависимости от назначения и технических требований, предъявляемых к электроприводу, различают два типа построения систем регулирования:
разомкнутые системы регулирования;
замкнутые системы регулирования.
Р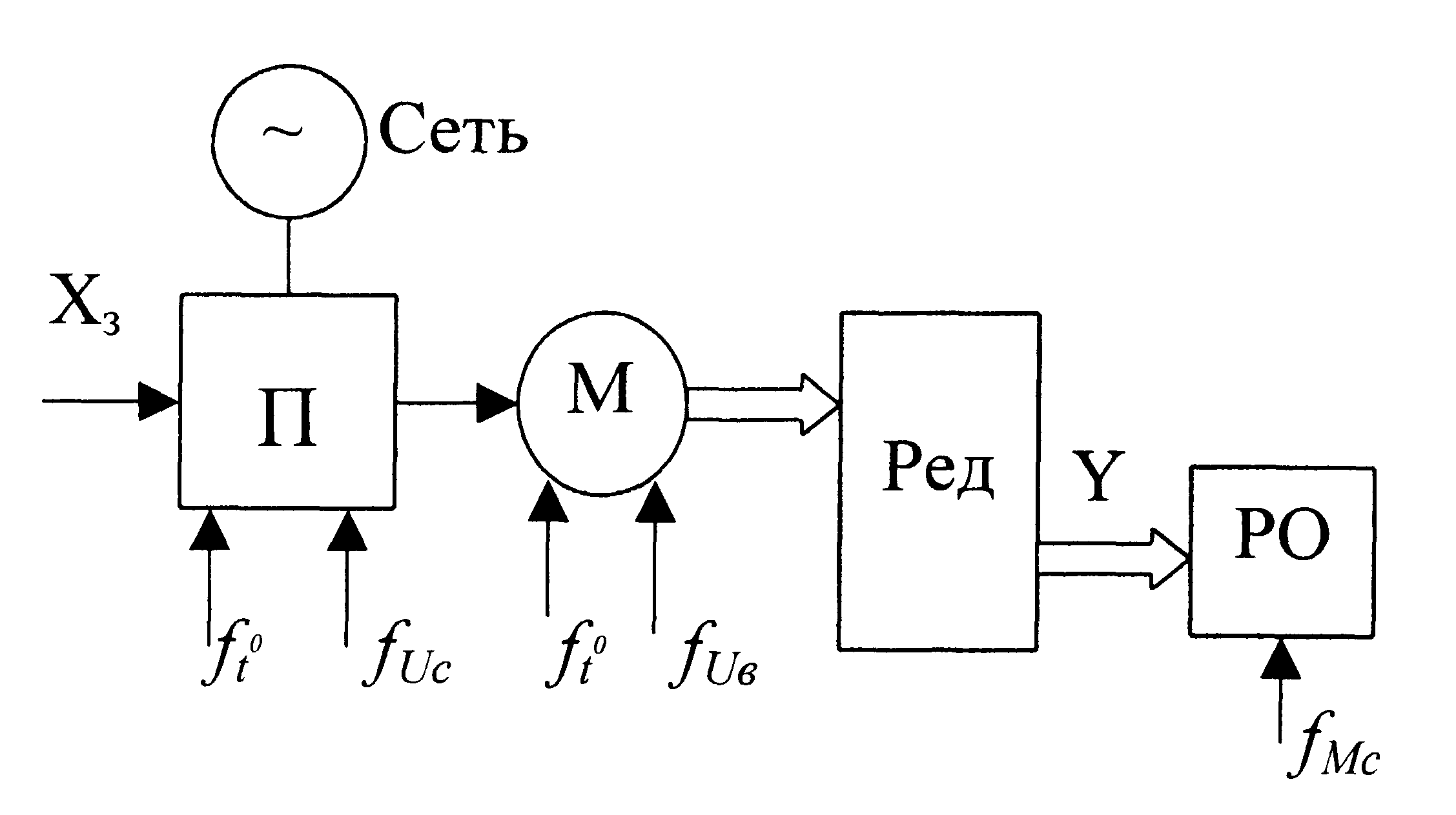
 азомкнутой
системой регулирования электропривода
называется система, в которой отсутствует
обратная связь по выходной регулируемой
координате. Функциональная схема
разомкнутой системы электропривода
приведена на рис.14.1. В такой системе
фактическое значение регулируемой
координатыY
существенно зависит от возмущений f,
действующих на узлы системы и рабочий
орган, так как сигнал управления U=Хз
не зависит от отклонения регулируемой
координаты от заданного значения.
азомкнутой
системой регулирования электропривода
называется система, в которой отсутствует
обратная связь по выходной регулируемой
координате. Функциональная схема
разомкнутой системы электропривода
приведена на рис.14.1. В такой системе
фактическое значение регулируемой
координатыY
существенно зависит от возмущений f,
действующих на узлы системы и рабочий
орган, так как сигнал управления U=Хз
не зависит от отклонения регулируемой
координаты от заданного значения.
Рис.14.1.
Функциональная схема разомкнутой
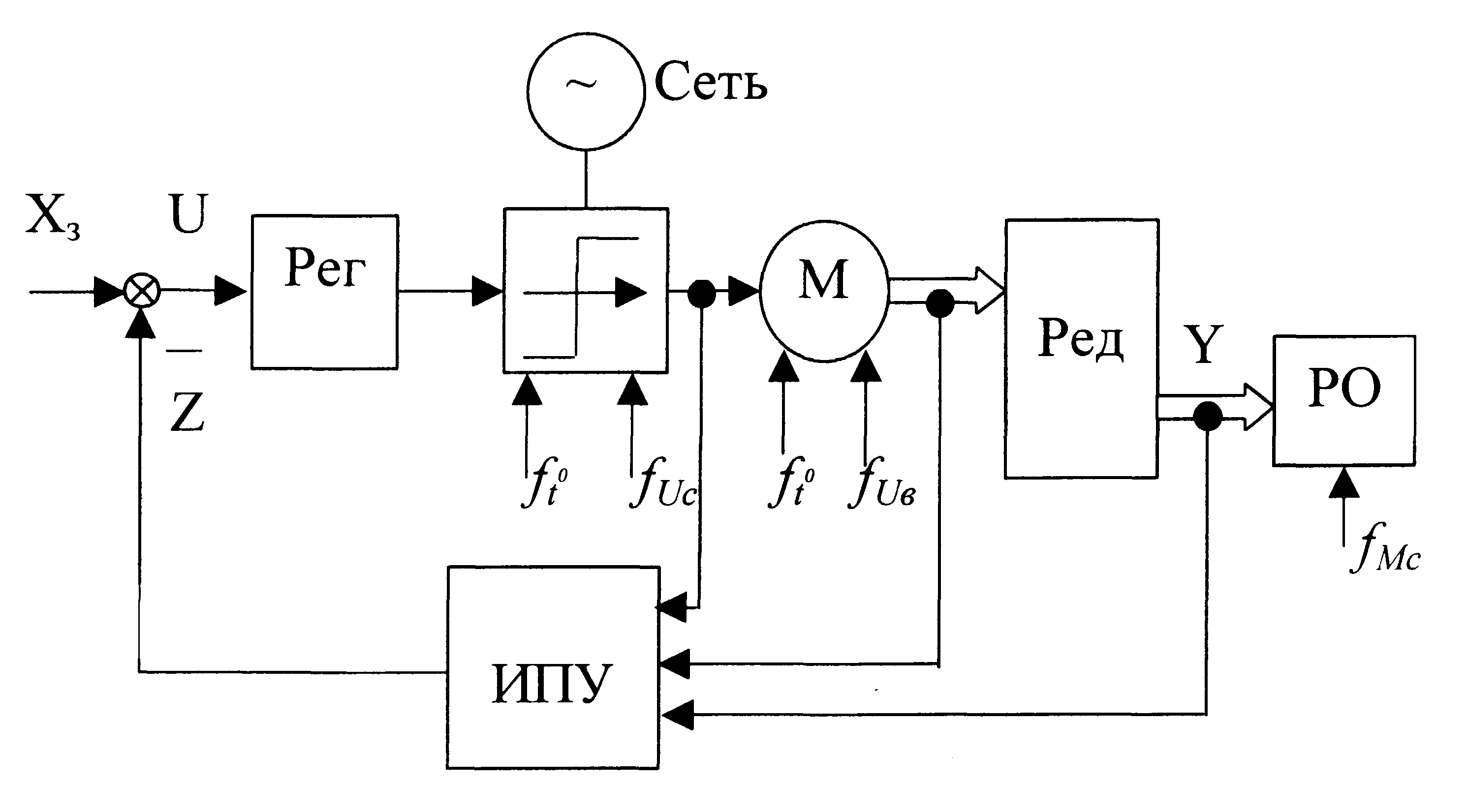
системы управления электроприводом Рис.14.2.
Функциональная схема замкнутой системы
управления электроприводом
Замкнутой системой регулируемого электропривода называется система, в которой имеется обратная связь по выходной координате. Функциональная схема такой системы приведена на рис.14.2. На рис.14.1, 14.2, 14.3 приняты следующие обозначения: П – управляемый преобразователь, М – двигатель, Ред – редуктор, РО – рабочий орган, Рег – регулятор, ИПУ – информационно-преобразовательное устройство, fМс – возмущения по моменту сопротивления на валу двигателя, fUc – возмущение по напряжению питающей сети, fUв – возмущения по цепи возбуждения, fT –возмущение по температуре.
В замкнутой системе регулирования сигнал управления U формируется из сигнала задания Хз и сигнала обратной связи Z, несущего информацию о фактическом значении регулируемого параметра У, которое зависит от возмущений, действующих на узлы системы и рабочий орган электропривода. В результате введения обратной связи ошибка регулирования уменьшается до допустимого значения. Сигнал управления U системы электропривода с обратной связью представляет собой отклонение (ошибку) регулирования относительно сигнала задания Хз. При этом ни одно из возмущений не измеряется, а их влияние на регулируемый параметр воспринимается системой по каналу обратной связи. Следовательно, в системах с отрицательной обратной связью по выходному параметру реализуется управление по отклонению.
14.2. Обратные связи и их назначение
Обратная связь представляет собой канал передачи и преобразования информации с выхода системы регулирования или ее узлов на вход с целью формирования результирующего сигнала управления.
Уравнение сигнала управления U=Хз±Z. В зависимости от знака сигнала Z обратная связь бывает положительной или отрицательной. Если сигнал обратной связи Z суммируется с сигналом задания Хз, то обратная связь называется положительной. Если сигнал обратной связи Z вычитается из сигнала Хз, то обратная связь называется отрицательной. По характеру действия обратные связи подразделяются на жесткие, гибкие и нелинейные обратные связи с зоной нечувствительности, которые иначе называются связями с отсечкой. Назначение и принцип действия наиболее часто применяемой в технике электропривода жесткой отрицательной обратной связи по скорости рассмотрено в гл.5.
Если обратная связь действует только во время переходных процессов, то такая обратная связь называется гибкой. Если обратная связь начинает действовать только с определенного уровня регулируемого параметра У, то такая обратная вязь называется задержанной или обратной связью с отсечкой. Жесткие обратные связи и обратные связи с отсечкой используются, в первую очередь, для формирования статических характеристик электропривода. Кроме того, жесткие и особенно гибкие обратные связи применяются для обеспечения устойчивости системы регулирования и получения желаемых динамических показателей, характеризующих протекание переходных процессов при воздействии на систему сигналов задания Хз и возмущения f.
14.3. Классификация замкнутых систем регулирования
Замкнутые системы электропривода классифицируются по следующим признакам: по принципу действия, по выходной регулируемой координате или по выполняемым функциям.
Классификация по принципу действия
По принципу действия системы регулирования автоматизированные электроприводы классифицируются следующим образом.
Системы электропривода с непрерывным управлением.
Системы электропривода с релейным управлением.
Системы электропривода с импульсным управлением.
Системы электропривода с цифровым (например, микропроцессорным) управлением.
Системы электропривода с непрерывным управлением. Это такие системы, в которых каждый из переменных параметров (координат) непрерывно изменяется во времени или остается постоянным. Функциональная схема такой системы соответствует рис.14.2.
Системы электропривода с релейным управлением – системы, у которых в прямом канале регулирования на входе электродвигателя имеется силовой релейный элемент с двумя устойчивыми состояниями:
Uвых=+Uп, если Uвх>0,
Uвых=0(или-Uп), если Uвх<0,
где: Uп – напряжение питания электродвигателя.
Его регулировочная характеристика приведена на рис.14.3.
Ф
 ункциональная
схема замкнутой системы электропривода
с релейным управлением приведена на
рис.14.4.
ункциональная
схема замкнутой системы электропривода
с релейным управлением приведена на
рис.14.4.
Рис.14.3.
Регулировочная характеристика идеального
реле а
– однополярное б
– двуполярное реле Рис.14.4.
Функциональная схема замкнутой системы
электропривода с релейным управлением
Системы электропривода с импульсным управлением – системы, в составе которых в прямой цепи регулирования имеется импульсный элемент, преобразующий непрерывный сигнал в непрерывную последовательность импульсов с определенными характеристиками. Наиболее распространены два типа импульсных преобразователей:
- амплитудно-импульсный модулятор (АИМ), формирующий последовательность импульсов с переменной амплитудой и с постоянными периодом и длительностью;
- широтно-импульсный модулятор (ШИМ), который формирует последовательность импульсов с переменной длительностью и с постоянными периодом и амплитудой.
Цифровые системы регулирования – это такие системы, в которых переменные преобразуются в цифровой код. Цифровые системы в настоящее время создаются на базе микропроцессоров, реализующих в цифровой форме функции регулятора Р и информационно-преобразовательного устройства (ИПУ).