

Глава 12. Специальные схемы электропривода
12.1. Вентильно индукторный электропривод
О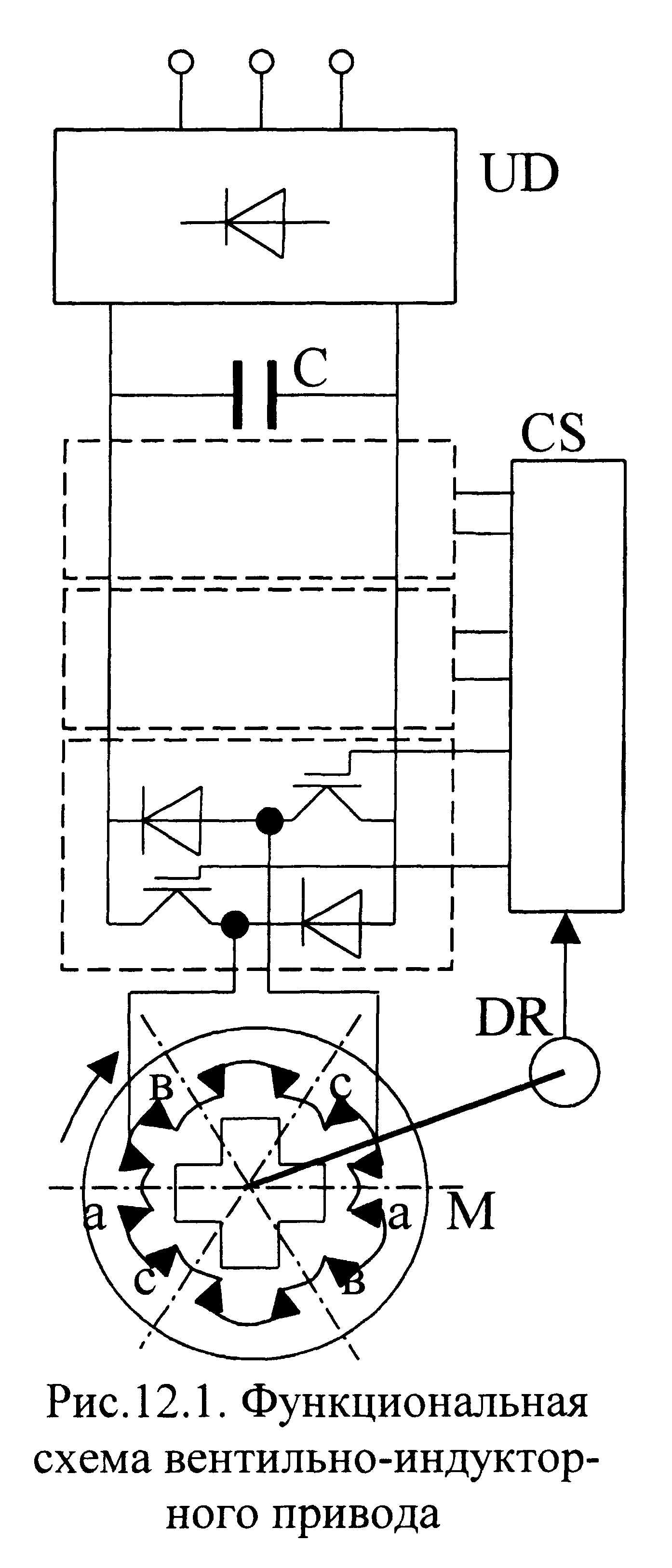 дной
из перспективных систем регулируемого
электропривода являются вентильно-индукторные
электроприводы, использующие индукторную
электрическую машину с пассивным
ротором. На статоре такой машины
располагаются электромагниты - индукторы
(см.рис.12.1.), по обмоткам которых поочередно
пропускается постоянный ток. Ротор
двигателя не имеет обмоток (пассивный)
и содержит ряд зубцов, число которых не
совпадает с числом зубцов магнитопровода
статора.
дной
из перспективных систем регулируемого
электропривода являются вентильно-индукторные
электроприводы, использующие индукторную
электрическую машину с пассивным
ротором. На статоре такой машины
располагаются электромагниты - индукторы
(см.рис.12.1.), по обмоткам которых поочередно
пропускается постоянный ток. Ротор
двигателя не имеет обмоток (пассивный)
и содержит ряд зубцов, число которых не
совпадает с числом зубцов магнитопровода
статора.
На рис.12.1 показана машина, имеющая 6 зубцов магнитопровода на статоре и 4 – на роторе. Машина управляется вентильным (транзис-торным) коммутатором, осуществля-ющим переключение обмоток индук-торов. Основная особенность вентиль-но-индукторных приводов заключает-ся в том, что переключение обмоток индукторов производится в соответствии с положением ротора, для чего в схеме применяется датчик положения DR.
Принцип работы вентильно-ин-дукторного привода состоит в пооче-редном последовательном включении индукто-ров (а-а, в-в, с-с), поток которых замыкается через зубцы ро-тора. Возбуждение индуктора вызы-вает возникновение электромагнитных сил притяжения между зубцами ин-дуктора и ближайшими к ним зубцами ротора.
Под действием этих сил (момента) ротор поворачивается и занимает согласованное положение, когда зубцы ротора устанавливаются напротив зубцов возбужденной фазы. Так как число зубцов статора и ротора различно, то в согласованном положении для одного индуктора для следующего индуктора зубцы ротора окажутся в несогласованном положении. Поэтому при отключении первого индуктора и включении последующего ротор снова повернется на одно полюсное деление. Последовательная коммутация индукторов с помощью датчика положения через систему управления CS обеспечивает непрерывное создание вращающего момента и, следовательно, непрерывное вращение ротора двигателя.
Величина электромагнитного момента определяется средней величиной тока, подаваемого в обмотки индукторов. Поэтому регулирование момента двигателя производится изменением напряжения, подводимого к обмоткам индуктора. В схеме рис.12.1 изменение напряжения производится методом широтно-импульсного регулирования (см.§6.3). Для точного регулирования скорости в рассматриваемых приводах вводится внешний контур регулирования.
Вентильно-индукторные электроприводы отличаются конструктивной простотой и экономичностью. Они находят применение для общепромышленных механизмов мощностью примерно до 50кВт, не предъявляющих высоких требований к качеству регулирования. Особенно эффективно использование вентильно-индукторных приводов для высокоскоростных механизмов с номинальной скоростью 6000об/мин и выше.
12.2. Электропривод с шаговым двигателем
Исполнительные органы некоторых рабочих машин и механизмов должны совершать строго дозированные перемещения с фиксацией своего положения в конце движения. Типичными примерами таких механизмов являются электроприводы подачи некоторых металлорежущих станков, сборочных агрегатов, манипуляторов и других машин. Для привода подобных машин используются шаговые электродвигатели. Особенностью таких двигателей является то, что их движение (угол поворота для двигателей вращательного движения или перемещение для двигателей поступательного движения) носит не непрерывный, а дискретный характер – шагами. Электропривод с такими двигателями часто называют дискретным электроприводом [1-15].
Широкое применение дискретного электропривода определяется тем, что по принципу своей работы он естественным образом сочетается с цифровыми системами управления: микропроцессорами и устройствами числового программного управления, которые все шире применяются во всех областях техники. Шаговые двигатели выпускаются промышленностью мощностью от нескольких ватт до нескольких киловатт. Двигатели характеризуются развиваемым им моментом (усилием) и величиной шага (дискреты). Чем меньше величина шага, тем с большей точностью осуществляется перемещение рабочего органа машины.
Принцип действия шагового двигателя рассмотрим на примере простейшей схемы двухфазного двигателя с активным ротором (рис.12.2). Такой шаговый двигатель имеет на статоре две пары явно выраженных полюсов, на которых находятся обмотки возбуждения, образующие две фазы двигателя. На роторе располагается постоянный магнит (активный ротор). Питание обмоток осуществляется импульсами напряжения, поступающими с устройства управления, которое преобразует последовательность управляющих импульсов – число шагов, - в многоканальную последовательность импульсов, где число каналов равно числу фаз двигателя.
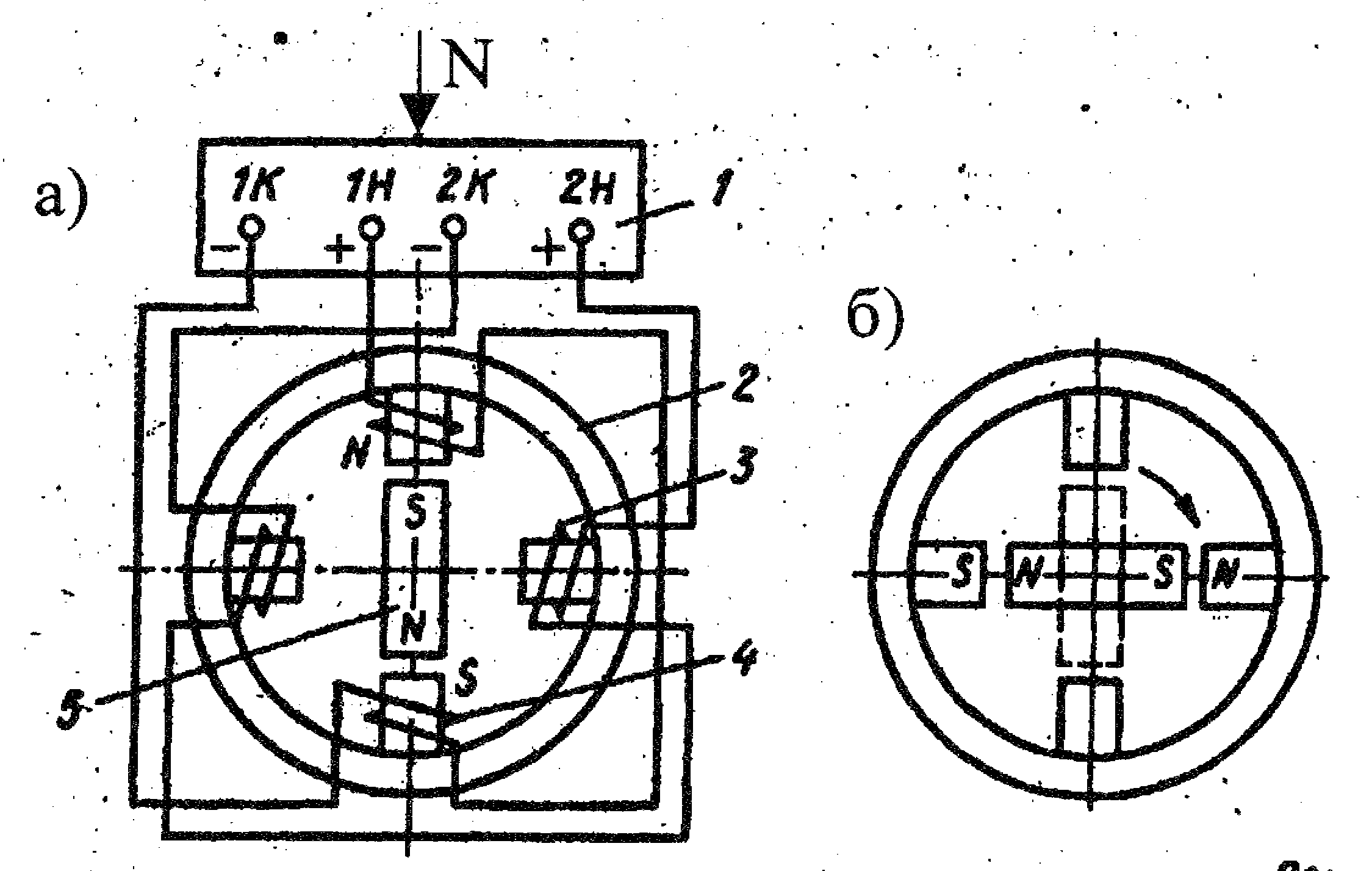
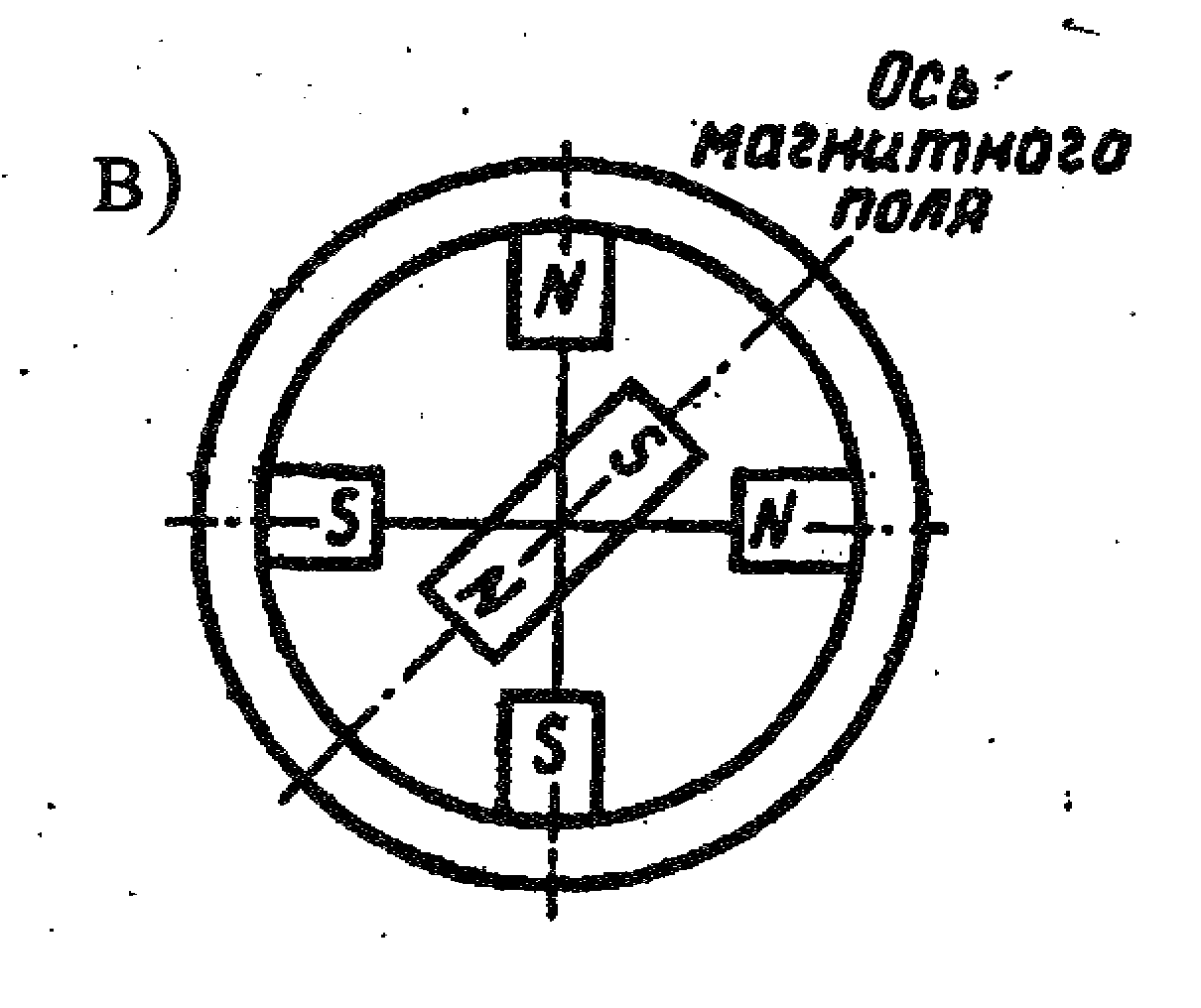
Рис.12.2. Упрощенная схема шагового двигателя с активным ротором
Пусть напряжение определенной полярности подано на первую обмотку (1Н-1К). Тогда ротор двигателя займет положение, показанное на рис.12.2а. Это положение будет устойчивым, поскольку при отклонении от него на ротор будет действовать момент, стремящийся вернуть ротор в прежнее положение.
Для
выполнения шага движения напряжение
снимается с первой обмотки и подается
на вторую (2Н-2К). При этом ротор двигателя
сделает шаг, т.е. повернется на угол
![]() (см.рис.12.2б). Для выполнения второго шага
нужно снять напряжение с обмотки 2 и
подать импульс напряжения обратной
полярности на обмотку 1, и т.д.
(см.рис.12.2б). Для выполнения второго шага
нужно снять напряжение с обмотки 2 и
подать импульс напряжения обратной
полярности на обмотку 1, и т.д.
Угловое
перемещение шагового двигателя за один
шаг будет:
![]() ,
,
где р – число пар полюсов ротора (в схеме на рис.12.2 р=1);
n – число фаз статорных обмоток.
Кроме
рассмотренного алгоритма коммутации
может быть применен более сложный
алгоритм, позволяющий вдвое уменьшить
величину шага. Пусть исходное положение
соответствует условию включения обмотки
1, показанному на рис.12.2. Далее, не снимая
напряжение с обмотки 1, подключим обмотку
2 с полярностью, соответствующей
рис.12.2в. При этом пространственный
вектор результирующей м.д.с. будет
располагаться между полюсами статора,
т.е. ось магнитного потока повернется
на угол
![]() .
Соответственно ротор повернется на
половину полюсного деления, т.е. на
.
Соответственно ротор повернется на
половину полюсного деления, т.е. на
![]() .
.
Для реверса шагового двигателя следует изменить полярность импульсов напряжения. Каждому импульсу управления соответствует один шаг поворота ротора. Суммарный угол поворота ротора соответствует числу поступающих импульсов управления N
![]() ,
,
а средняя скорость поворота – частоте коммутаций fк:
![]() .
.
Частота коммутаций является важным параметром шагового электропривода, т.к. она определяет время отработки управляющего воздействия. Допустимая частота коммутаций (ее называют частотой приемистости) ограничивается электромагнитной инерционностью обмоток и механической инерцией ротора и приводимого механизма. Чем выше инерционность двигателя и больше статический момент на валу двигателя, тем меньше частота приемистости.
Современные шаговые двигатели различны по конструктивному исполнению. Двигатели бывают однофазными, двухфазными и многофазными с активным и пассивным ротором.
Конструкция
активного ротора обычно содержит
постоянные магниты и имеет величину
шага от
![]() до
до
![]() .
Частота коммутаций таких двигателей
ограничена величиной примерно 500Гц.
.
Частота коммутаций таких двигателей
ограничена величиной примерно 500Гц.
Для
шаговых двигателей с малой величиной
шага используют пассивный ротор, не
содержащий обмоток и магнитов. Статор
реактивного шагового двигателя имеет
явно выраженные полюсы, на которых
нарезаны зубцы (см.рис.12.3). На роторе
равномерно по окружности нарезано
четное (но не делящееся на 4) число зубцов.
Выбором числа зубцов ротора достигается
смещение в любом положении зубцов ротора
по отношению к зубцам смежных полюсных
выступов статора на ¼ зубцового деления
[1-1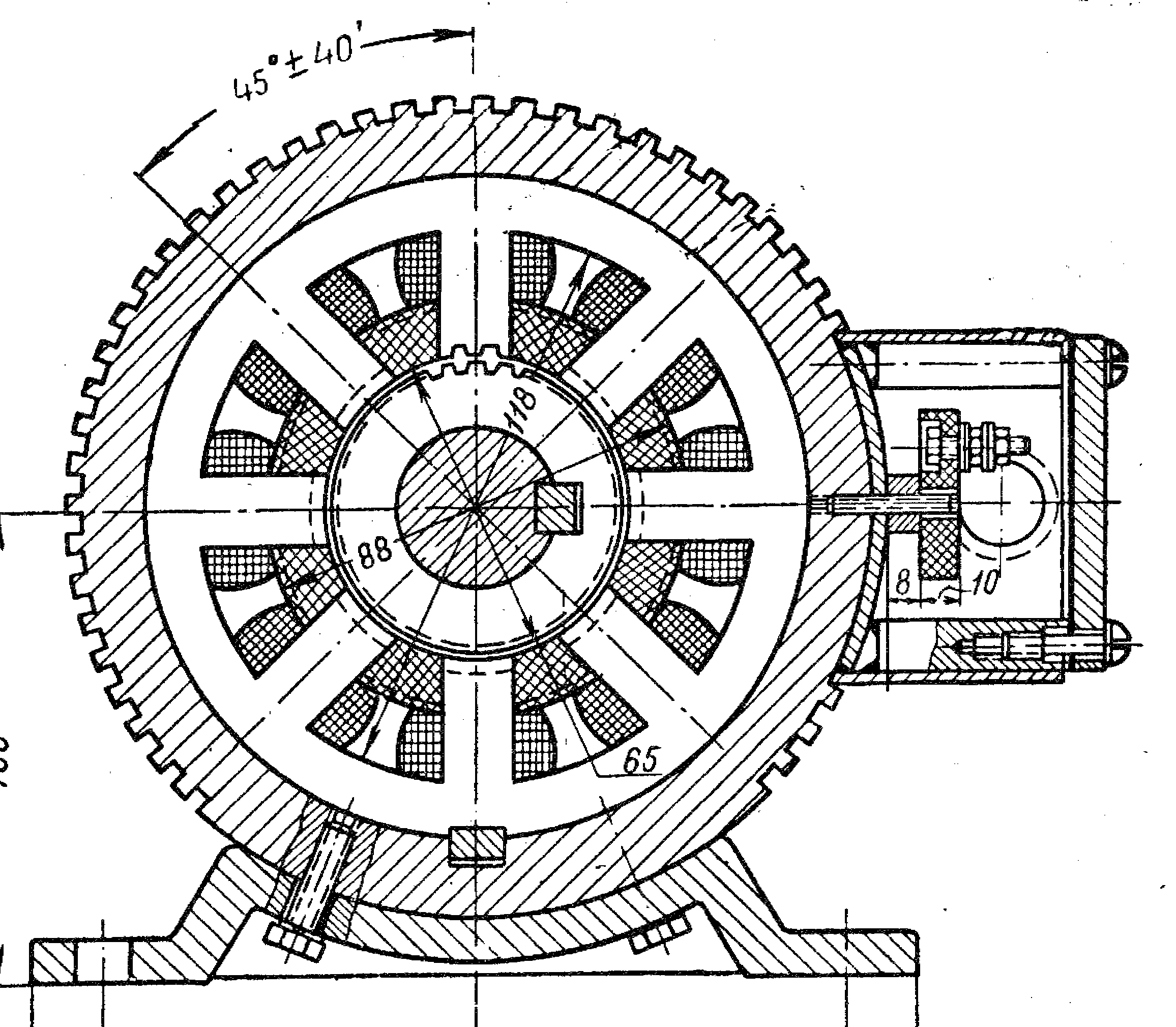 1].
1].
Р
Рис.12.3.
Поперечный разрез четырехполюсного
шагового двигателя с пассивным ротором
При
подаче тока в следующую фазу статора
ротор повернется на один шаг, так, чтобы
зубцы ротора совпали с зубцами полюса
следующей фазы. Величина шага при этом
равна
![]() .
.