

17.4. Методика динамического синтеза цифрового контура управления
Общие положения
Цель динамического синтеза - определить структуру и параметры цифрового регулятора, обеспечивающего желаемые динамические и статические свойства электропривода. К желаемым свойствам могут относиться точность регулирования координаты (скорости, положения), перерегулирование, время переходного процесса.
Н
Рис.17.13.
Недетализированная структурная схема
цифрового контура регулирования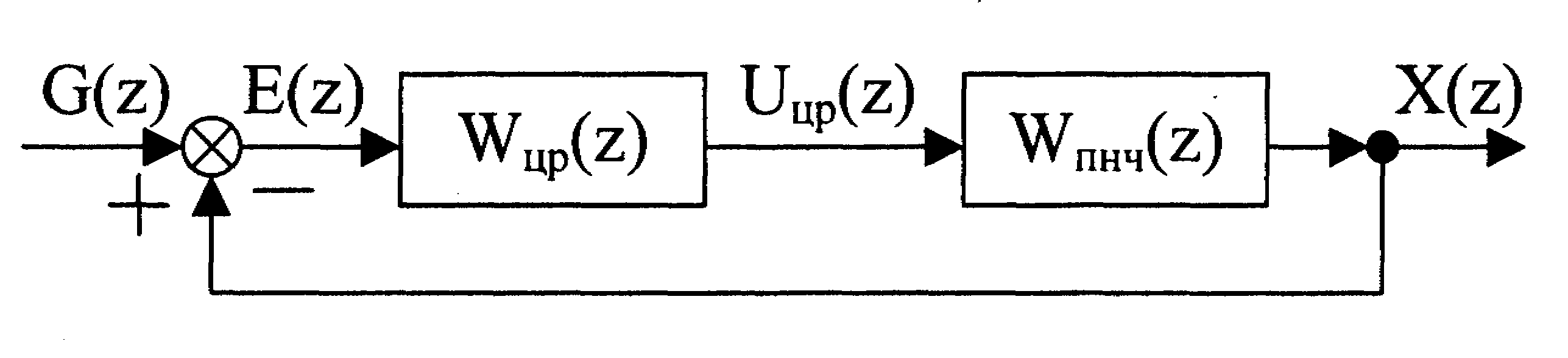 едетализированая
структурная схема циф-рового контура
автома-тического регулирования
представлена на рис.17.13. Она состоит из
частей: цифрового регулятора (ЦР), ДПФ
которого подлежит определению в процессе
динамического синтеза, и приведенной
непрерывной части (ПНЧ) – неизменяемой
части системы.
едетализированая
структурная схема циф-рового контура
автома-тического регулирования
представлена на рис.17.13. Она состоит из
частей: цифрового регулятора (ЦР), ДПФ
которого подлежит определению в процессе
динамического синтеза, и приведенной
непрерывной части (ПНЧ) – неизменяемой
части системы.
Если известна желаемая дискретная передаточная функция (ДПФ) замкнутого контура [Wзж(z)], то желаемая ДПФ этого контура в разомкнутом состоянии
![]() ,
(17.49)
,
(17.49)
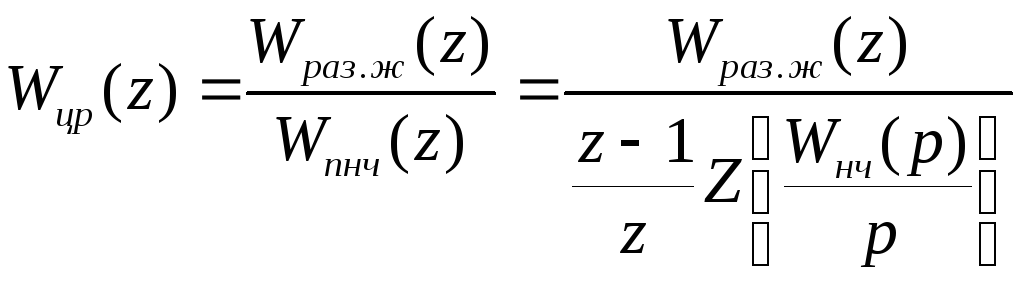
а поэтому ДПФ ЦР находится по формуле
![]() ,
(17.50)
,
(17.50)
![]() ,
(17.51)
,
(17.51)
где: Dзж(z) – желаемый дискретный характеристический полином (ДХП) замкнутого контура.
Итак, на основании формул (17.49), (17.50) и (17.43) можно определить ДПФ ЦР
 .
(17.52)
.
(17.52)
При такой процедуре динамического синтеза необходимо обеспечить условия реализуемости желаемой динамики цифрового контура регулирования.
Пусть ДПФ ПНЧ имеет следующий вид:
![]() ,
(17.53)
,
(17.53)
где: n – порядок астатизма ПНЧ;
Р(z), Q(z) – полиномы порядка lp и lQ.
Для случая ДПФ ПНЧ (17.53) замкнутого контура (17.51) запишем условия реализуемости [3-4].
Условие физической реализуемости: ДПФ замкнутого контура (17.51) должна быть правильной дробью, в которой порядок числителя (m) меньше порядка знаменателя (l); если в Wпнч(z) есть запаздывание (е-p, где <T), то оно должно быть также в Wзж(z).
Условие «грубости» системы: небольшие изменения параметров ЦР или параметров НЧ вызывают незначительные изменения динамических процессов в замкнутом контуре; это означает, что процентное изменение показателя процесса не превосходит процентное изменение параметра. Для выполнения этого условия требуется, чтобы ПНЧ была устойчивой и минимально фазовой, т.е. уравнения Р(z)=0 и Q(z)=0 должны иметь корни, модули которых меньше единицы (условие устойчивости) и иметь отрицательную вещественную часть.
Условие получения желаемого процесса в любые моменты времени t=(к+)Т, где =t/T<1, в пределах периода дискретности Т. Wзж(z) должна иметь в составе числителя В(z) все нули полинома P(z) (см. формулы (17.51) и (17.53). Это условие может быть достигнуто, если В(z)=P(z)M(z), т.е.
, (17.54)
где: М(z) – полином порядка lм=m-lp, подлежащий определению.
Условие получения в системе регулирования астатизма порядка : желаемая ДПФ ошибки замкнутого контура
![]() ,
(17.55)
,
(17.55)
где: N(z) – полином порядка ln=l-, подлежащий определению.
Если выполнить все указанные условия в отношении полиномов ДПФ и объединить выражения (17.53) и (17.54), то можно получить результирующее полиномиальное уравнение («уравнение реализуемости»)
![]() ,
(17.56)
,
(17.56)
где: lp+lм<l, +ln=l.
По данному уравнению могут быть найдены методом сравнения коэффициентов правой и левой частей полиномы М(z) и N(z). Следовательно, определяется ДПФ:
![]() ;
(17.57)
;
(17.57)
![]() .
(17.58)
.
(17.58)
Таким образом, полиномиальное уравнение (17.56) позволяет выполнить корректный динамический синтез цифрового контура, обеспечивающий желаемую динамику при выполнении перечисленных выше условий. Процедуры такого синтеза ориентируются на стандартные уравнения (или передаточные функции) для непрерывных систем, в которых обеспечен модульный и симметричный оптимум.
Dзж(р) переводится в дискретную форму Dзж(z), имеющую тот же порядок l=+lQ. Найденные из уравнения (17.56) полиномы М(z) и N(z) позволяют определить по формуле (17.58) ДПФ ЦР.
Рассмотрим частный случай ДПФ замкнутого контура, когда
![]() .
(17.59)
.
(17.59)
Выходная координата данного замкнутого контура определится выражением
![]() .
(17.60)
.
(17.60)
Если g[к]=1[к], то переходный процесс в соответствии с (17.60) закончится за конечное число тактов к=l, после которых x[к]=b0+b1+…+bm=const, т.е. имеет место переходный процесс конечной длительности
Tпп=lT, (17.61)
где: l – порядок системы. Такие возможности характерны только для линейных дискретных систем.