

Рассмотрим в качестве примера уравнение
![]()
Используя формулу (17.11), получаем
![]()
Введем
новую переменную
![]() и тогда получим
и тогда получим
![]()
т.е.
при
![]() т.е.
т.е.![]() .
.
Решение разностного уравнения можно записать в следующем виде:
![]() ,
,
где:
![]() находится из решения однородного при
учете начальных условий, а
находится из решения однородного при
учете начальных условий, а![]() является частным решением разностного
уравнения, которое зависит от внешнего
воздействия и не зависит от начальных
условий. При решении разностных уравнений
целесообразно использовать дискретное
преобразование Лапласа илиZ-преобразование.
является частным решением разностного
уравнения, которое зависит от внешнего
воздействия и не зависит от начальных
условий. При решении разностных уравнений
целесообразно использовать дискретное
преобразование Лапласа илиZ-преобразование.
17.3. Основы математического анализа цифровых систем управления
Цифровые системы автоматического управления содержат в контуре регулирования ЭВМ, аналого–цифровой преобразователь (АЦП) и цифро-аналоговый преобразователь (ЦАП).
В этом случае осуществляется квантование
сигнала по времени и по уровню. Это
означает, что характеристика цифрового
регулятора (ЭВМ) является нелинейной,
что и показано на рис.17.5. На этом рисунке
величина младшего разряда обозначена
буквой.
этом случае осуществляется квантование
сигнала по времени и по уровню. Это
означает, что характеристика цифрового
регулятора (ЭВМ) является нелинейной,
что и показано на рис.17.5. На этом рисунке
величина младшего разряда обозначена
буквой.
Е
Рис.17.5.
Характеристика цифрового устройства
П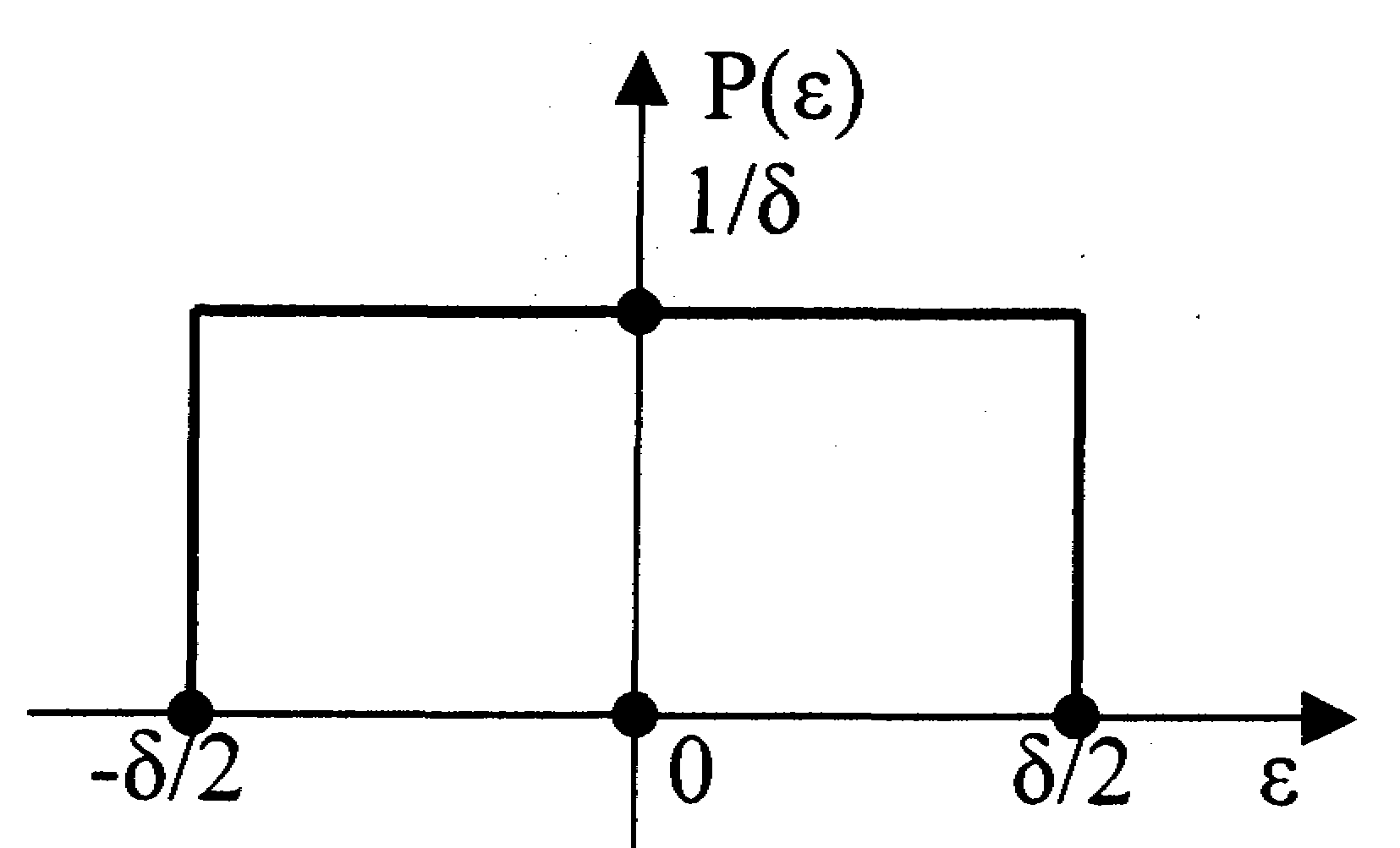 редположим
случайный характер этой погрешности,
имеющей равномерный закон распределения
вероятности, график, которого показан
на рис.17.6.
редположим
случайный характер этой погрешности,
имеющей равномерный закон распределения
вероятности, график, которого показан
на рис.17.6.
В
Рис.17.6.
Закон распределения случайной
погрешности, обусловленной квантованием
по уровню
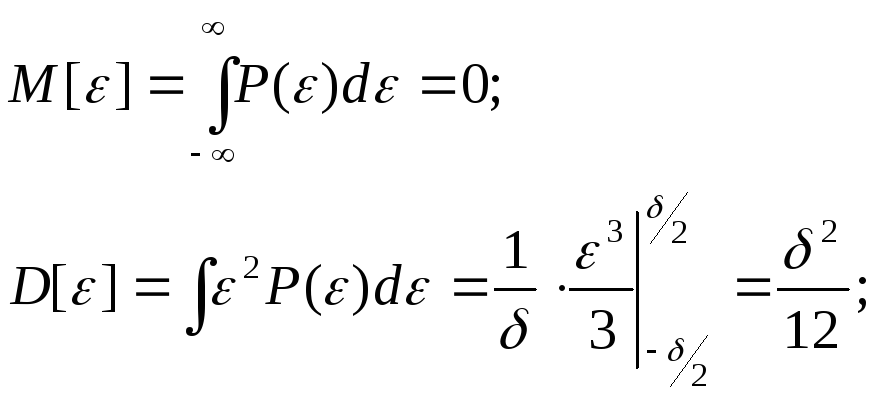 (17.15)
(17.15)
где: М[] – математическое ожидание помехи;
D[] – дисперсия.
В дальнейшем будем рассматривать линеаризованные цифровые автоматические системы (ЦАС) без учёта квантования сигнала по уровню, но с учетом вносимой им помехи.
В зависимости от взаимного расположения ЭВМ и непрерывной части системы, цифровые САУ могут быть цифроаналоговыми и аналого-цифровыми [3-2].
Функциональная схема цифро-аналоговой САУ показана на рис. 17.7.
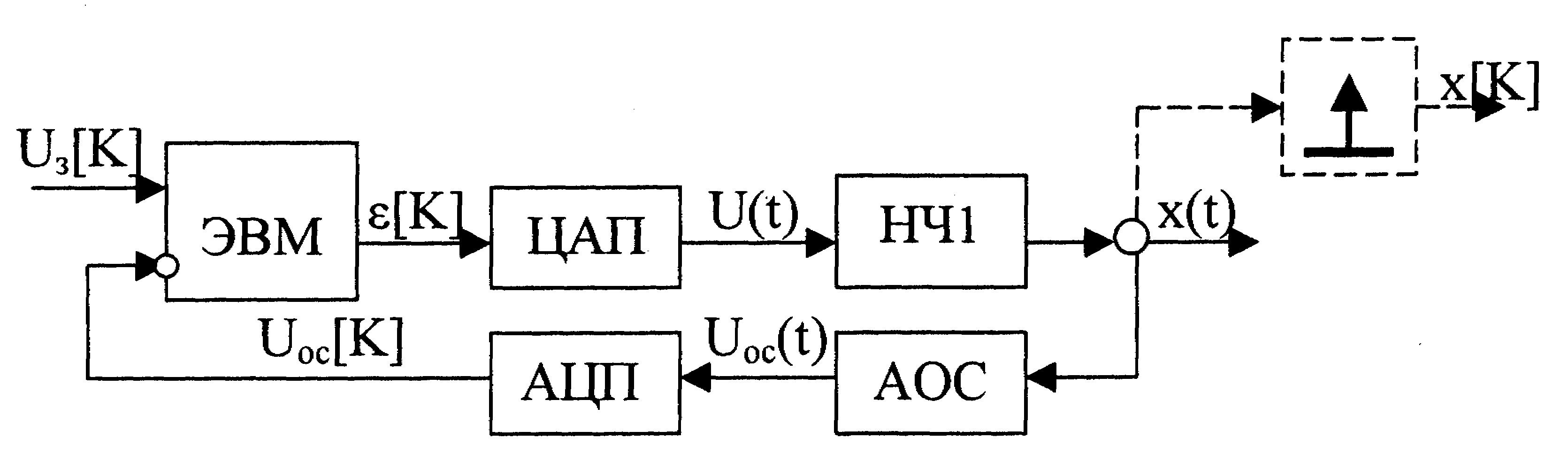
Рис.17.7. Функциональная схема цифро-аналоговой системы
Обратим внимание на то, что ЭВМ в этом случае выполняет функции сравнивающего устройства дискретных сигналов (цифровых кодов) и регулятора.
Функциональная схема аналого-цифровой САУ представлена на рис.17.8.

Рис.17.8. Функциональная схема аналого-цифровой системы
Аналого-цифровой будем называть систему, в которой цифровой части предшествует хотя бы одно непрерывное звено (или несколько непрерывных звеньев; обозначение: НЧ1).
Различия между цифроаналоговой и аналого-цифровой системами заключается в следующем.
В цифроаналоговых системах непрерывные звенья присутствуют лишь на выходе. Поэтому такие системы можно рассматривать как обобщенные цифровые фильтры с входными и выходными сигналами в виде решетчатых функций времени.
Выходной сигнал аналого-цифровой системы зависит от значений входного сигнала в любой момент времени, а не только в тактовых точках кТ, следовательно, такая система не может быть описана разностным уравнением.
Практически в цифровых САУ перед цифровой частью часто имеется непрерывное звено. Если его инерционностью можно пренебречь, систему считают цифроаналоговой, что упрощает исследование. В противном случае система должна рассматриваться как аналого-цифровая.
Рассмотрим линеаризованную цифровую САУ, в которой учитывается только квантование сигнала по времени, и преобразование сигнала осуществляется в соответствии с амплитудно-импульсной модуляцией первого рода (АИМ I). В этом случае для удобства расчётов используют эквивалентную структурную схему линейной импульсной системы [3-1].



Рис.17.9. Структурные схемы линейной дискретной САУ:
а) исходная структурная схема; б) график реального импульса; в) эквивалентная структурная схема
На рис.17.9а приведена структурная схема линейной дискретной системы, на которой показано реальное импульсное звено (РИЗ) и передаточная функция непрерывной части системы [Wнч(р)]. На рис.17.9б показан график функции S(t), которая соответствует реальному импульсу в пределах периода квантования по времени (T).
Из структуры рис.17.9в можно записать:
![]() .
(17.16)
.
(17.16)
Так как предполагается, что идеальное импульсное звено (ИИЗ) генерирует последовательность мгновенных единичных импульсов (-функций), то сигнал на выходе ИИЗ можно представить в виде следующей суммы:
![]() .
(17.17)
.
(17.17)
В дальнейшем вместо (кТ) будем записывать [к]. В силу свойств ИИЗ введём в эквивалентную структурную схему (рис.17.9в) формирующее звено (ФЗ) с передаточной функцией
![]() ;
(17.18)
;
(17.18)
т.к. весовая функция ФЗ
![]() .
(17.19)
.
(17.19)
Например, для РИЗ на выходе которого имеет место последовательность прямоугольных импульсов скважностью =Ти/Т, можно найти Wф(р) на основе графиков, изображенных на рис.17.10, из которого следует, что
![]() .
(17.20)
.
(17.20)
Преобразовав обе части соотношения (17.20) по Лапласу, получим
![]() .
(17.21)
.
(17.21)


Рис.17.10. Формирование прямоугольного импульса со скважностью
Учитывая выражение (17.18) получим, например для Ки=1 и =1,
![]() .
(17.22)
.
(17.22)
ФЗ с передаточной функцией (17.22) называется экстраполятором (фиксатором) нулевого порядка.
Последовательное соединение ФЗ и НЧ принято называть приведенной непрерывной частью системы, ПНЧ т.е.
Wпнч(р)=Wф(р)Wнч(р). (17.23)
Для дискретных значений выходной величины х*(t) c учётом свойств фиктивного ИИЗ на входе (см.рис.17.9) можно записать
(17.2.10.)![]() .
.
Спектр, т.е. совокупность гармонических функций, на которые может быть разложена (t-кТ), равен е-jкТ, а поэтому спектр
![]() .
(17.25)
.
(17.25)
Заменив в (17.25) j=р, получим формулу, определяющую прямое дискретное преобразование Лапласа для решетчатой функции
![]() .
(17.26)
.
(17.26)
Сопоставляя формулы (17.25) и (17.26), а также учитывая, что частота квантования Т=2/Т получим
![]() ,
,
т.е.
вся плоскость р
для дискретной переменной раз-делена
на полосы вдоль мнимой оси, одинаковые
по размеру, равному Т.

Главная полоса распо-ложена на комплексной плоскости р в интервале
-0,5Т<Imp0,5Т, (17.27)
к
Рис.17.11.
Главная полоса плоскости р,
соответствующей дискретному преобразованию
Лапласа
Эту полосу плоскости р и рассматривают, так как все особенности системы (на-пример, расположение корней характеристического уравнения) одинаково отображаются во всех полосах.