

Z- преобразование и его свойства
Аналогично тому, как с помощью преобразований Лапласа линейное дифференциальное уравнение преобразуется в алгебраическое, линейное разностное уравнение можно преобразовать в алгебраическое уравнение с помощью Z-преобразования [3-2].
Обозначим в формуле (17.26)
Z=epT. (17.28)
На этом основании вводится понятие о Z-преобразовании
![]() .
(17.29)
.
(17.29)
Подставляя p=j в (17.28) и рассматривая диапазон частот (-/T)/T,
Получаем
![]() (17.30)
(17.30)
Э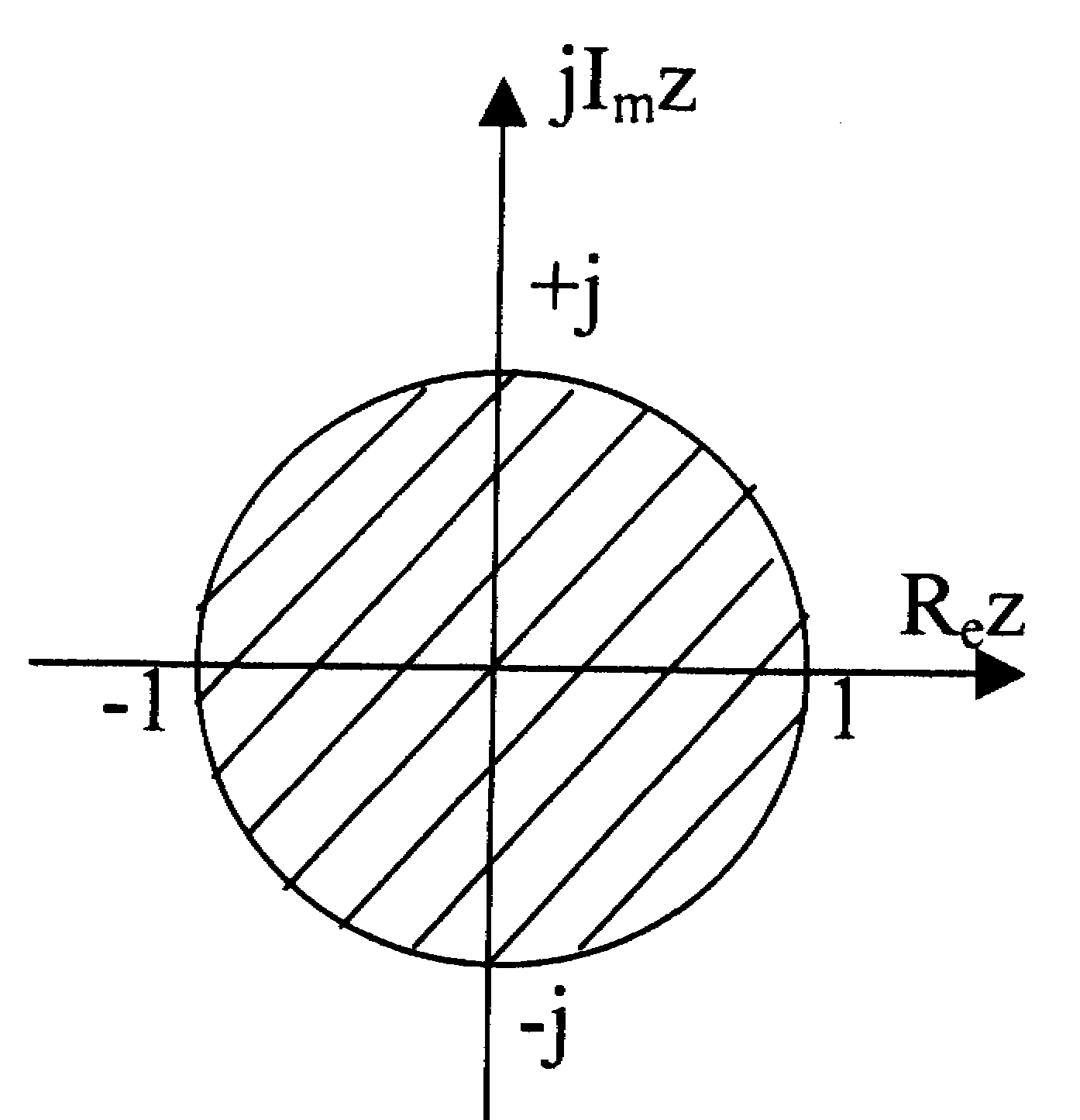 то
означает, что на плоскостиZ
отрезок мнимой оси главной полосы
плоскости р
(рис.17.11) отображается в окружность
единичного радиуса на плоскости Z
(рис.17.12). При этом область устойчивости
соответствует внутренней части круга,
ограниченной окружностью единичного
ради-уса, являющейся границей устойчи-вости
на плоскости Z.
то
означает, что на плоскостиZ
отрезок мнимой оси главной полосы
плоскости р
(рис.17.11) отображается в окружность
единичного радиуса на плоскости Z
(рис.17.12). При этом область устойчивости
соответствует внутренней части круга,
ограниченной окружностью единичного
ради-уса, являющейся границей устойчи-вости
на плоскости Z.
В
Рис.17.12.
Область устойчивости линейной дискретной
системы на плоскости
Z–преобразование (17.29) применимо только для дискретной по времени функции [к]=(кТ), где Т- период квантования. Учитывая, что z – комплексная переменная, обратное преобразование осуществляется по формуле
![]()
![]() ,
(17.31)
,
(17.31)
где: контур интегрирования включает все полюса функции F(z).
Приведём без доказательства основные свойства Z–преобразования [3-2]
а) ![]()
![]() ;
(17.32)
;
(17.32)
б) ![]() (17.33)
(17.33)
в)  ;
(17.34)
;
(17.34)
г) ![]() ;
(17.35)
;
(17.35)
д) ![]() ;
(17.36)
;
(17.36)
е) ![]() ;
(17.37)
;
(17.37)
ж)  ;
(17.38)
;
(17.38)
з)  (17.39)
(17.39)
Таблица 17.1
Z-изображения дискретных функций
|
№ п/п |
Х(t) при t0 |
X(p) |
X(z) |
|
1 |
1(t) |
|
|
|
2 |
t |
|
|
|
3 |
|
|
|
|
4 |
е-at |
|
|
|
5 |
sinβt |
|
|
|
6 |
|
|
|
Дискретные передаточные функции и методика их определения
Выходную величину непрерывной части (НЧ) системы можно определить как реакцию ПНЧ на - функции с выхода ИИЗ, которая представляет собой весовую функцию wп(t). Тогда реакция на n импульсов представляется суммой выходных переменных от каждого импульса:
n=0 xo(t)=[0]wп(t); n=1 x1(t)=[1]wп(t-T);
n=2 x2(t)= [2]wп(t-2T);…; n=m xm(t)=[m]wп(t-mT);
откуда следует
![]() для
для
![]()
Для дискретных моментов времени
![]() .
(17.40)
.
(17.40)
Из условия свёртки
решётчатых функций (17.37) с учётом того,
что
![]() и
и![]() ,
следует
,
следует
 ,
,
или с учётом (17.40) и того, что Z{x(n)}=X(z), получим
![]() ,
(17.41)
,
(17.41)
где: ![]() (17.42)
(17.42)
- дискретная передаточная функция (ДПФ) ПНЧ.
Учитывая формулы (17.22) и (17.23), можно найти ДПФ из следующего соотношения:
![]() .
(17.43)
.
(17.43)
Формулу (17.43) можно представить и в таком виде:
![]() .
(17.44)
.
(17.44)
Так как
![]() - прямое изображение по Лапласу переходной
функции НЧ
- прямое изображение по Лапласу переходной
функции НЧ![]() .
.
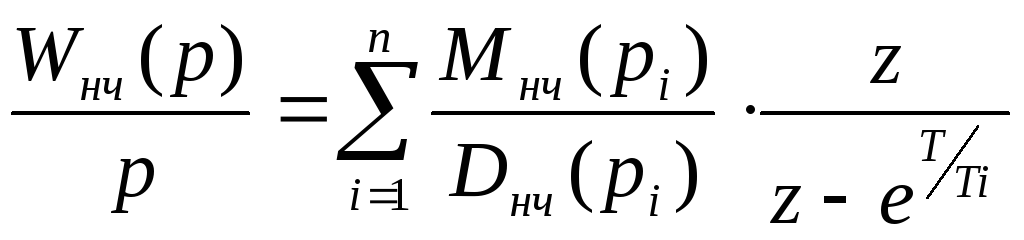
Наиболее употребительный способ получения ДПФ разомкнутых дискретных систем основан на разложении Wнч(р)/р на простые дроби. Предположим, что непрерывная часть системы имеет дробно-рациональную передаточную функцию, в которой степень числителя меньше степени знаменателя, что практически всегда имеет место. Тогда в общем случае
![]() .
(17.45)
.
(17.45)
Постоянные Аl, Bi, Cj и Dj удобно определять с помощью метода неопределённых коэффициентов. В простейших случаях (отсутствие кратных нулевых корней Dнч(p) и комплексных корней, приводящих к множителям второго порядка) разложение на простые дроби можно производить пользуясь формулой
 .
(17.46)
.
(17.46)
Формула (17.46) справедлива и при комплексных корнях, а для кратных корней имеются аналогичные формулы, однако практически удобней пользоваться методом неопределённых коэффициентов. Для этого нужно привести правую часть (17.45) к общему знаменателю и составить систему уравнений на основе сопоставления коэффициентов при одинаковых степенях p числителей левой и правой частей уравнения (17.45). Для того, чтобы воспользоваться таблицами Z–преобразования слагаемые второго и третьего типа приводят к данному в таблицах виду:
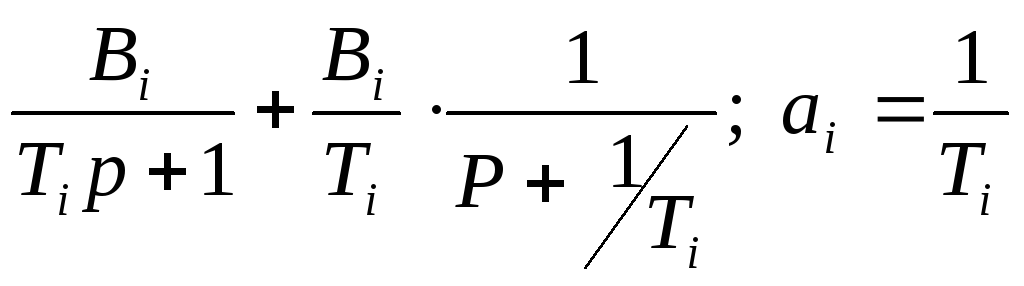 ;
(17.47)
;
(17.47)
 (17.48)
(17.48)
В таблице 17.1.приняты
обозначения:
![]()
![]() и
приведены изображения непрерывных
функций по Лапласу и соответствующие
имZ–преобразования
дискретных функций.
и
приведены изображения непрерывных
функций по Лапласу и соответствующие
имZ–преобразования
дискретных функций.
Воспользовавшись этой таблицей и формулой (17.43), можно найти ДПФ разомкнутой системы.
Найдём ДПФ для линеаризованной цифровой системы (с учётом действия прямоугольных импульсов с полным заполнением периода квантования) с передаточной функцией непрерывной части
![]() .
.
Разложим Wнч(р)/р на простые дроби
![]() ,
,
где на основании метода неопределённых коэффициентов

Согласно формуле (17.43) и таблице 17.1
 ;
;
или после приведения к общему знаменателю
 .
.