

ТЭП-Курс_лекций_04-2006
.pdfРежим S5отличается тем, что помимо сложного электрического запуска он включает в себя электрическое торможение, длительность которого так же соизмерима с t и оказывает влияние на нагрев двигателя.
ПВ% tP tПУСК tТОРМ 100%. tP tПУСК tТОРМ t0
Режимы S6, S7 и S8 относятся к так называемым перемещающимся режимам, при этом эти режимы можно отнести к продолжительным с изменяемым режимом работы. S6характеризуется продолжительным режимом с чередующимися периодами работы при номинальной нагрузке на валу и работой в режиме х.х.
Режим S7 - перемежающийся режим с чередующимися работой при номинальной нагрузке и реверсами.
Режим S8 - продолжительный режим характеризуется работой привода на разных скоростях вращения, число различных скоростей не меньше 2-х.
3.5.1Выбор мощности ЭД для различных режимов работы
Вобщем случае выбор мощности ЭД включает в себя 3 этапа и проводится с использованием в качестве исходной информации нагрузочной диаграммы ЭП:
M(t),P(t),I(t).
1. Выбор ЭД по нагреву.
Двигатель при работе в существующем режиме должен быть полностью использован по нагреву, в противном случае:
а) если двигатель перегружен – это приведёт к преждевременному выходу их строя изоляции ЭД.
б) если двигатель недогружен, то он потребляет из сети большое количество реактивной мощности , т.е. загрязняет сеть.
2.Проверка по допустимой механическое перегрузке.
Не соблюдение может привести к неустойчивой работе ЭП.
3.По возможности запуска.
Выбор мощности ЭД для режимов S1,S6,S7 S8 (для продолжительной работы):
а) для продолжительного режима с постоянной нагрузкой. В этом случае выбор производиться в один этап.
Рис. 90 Нагрузочная диаграмма режима S1
ОпределяютPЭФ . Исходное данные для расчета определяются видом механизма и его пас-
портными данными.
Например эффективная мощность насоса.
QH
PЭФ НАС ПЕР ,
где (Н м3 )- удельная плотность жидкости.
Q- производительность м3 с;
с;
81

H- расчетная высота подачи (м);
НАС 0,7 0,8;
ПЕР 0,5 0,8.
Эффективная мощность вентилятора:
VH
PЭФ ВЕНТ ПЕР ,
где V м3 с- производительность; h Н м2 - напор;
с- производительность; h Н м2 - напор;
ВЕНТ 0,3 0,8.
По каталогу выбирается PНОМ PЭФ .
Для продолжительных режимов с изменяющейся нагрузкой на валу двигателя 1-й этап выбора мощности ЭД может быть произведен с помощью точных или примерных методов. При этом наиболее универсальным и точным выбором ЭД по нагреву является так называемый метод средних потерь . Этот метод заключается в том, что с помощью нагрузочных диаграмм определяются так называемые средние потери мощности за рабочий цикл которые затем сравниваются с номинальными потерями мощности выбранного ЭД. Пусть нагрузочная диаграмма имеет следующий вид:
Рис. 91 Нагрузочная диаграмма.
P |
|
P1t1 P2t2 ....... Pntn |
СР |
|
t1 t2 ...... tn |
|
|
При этом потери мощности на каждой ступени нагрузочной диаграммы ( Pi ):
Pi Pi 1 i
i
где Pi - мощность на i й ступени;
i - КПД i й ступени нагрузочной диаграммы.
Для определения i используют следующее выражение.
|
i |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
, |
||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
ai |
|
|
|
|
1 ( |
1 |
|
|
1) |
i |
, |
||||||||||
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
||||||||||
|
|
НОМ |
|
|
|
|
|
1 ai |
|||||||||
где НОМ номинальное КПД выбранного двигателя; |
|
|
|
|
|
||||||||||||
i |
коэффициент загрузки двигателя на i й ступени нагрузочной диаграммы. |
||||||||||||||||
|
|
|
|
i |
|
|
|
Pi |
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
P |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
НОМ |
|
|
|
|
|
|
|
||
где аi - коэффициент постоянных потерь |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
а |
|
|
|
|
P0 |
|
, |
|
|
|
|
|
|
|
|
|
|
|
2P |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
i K |
|
|
|
|
|
|
|
||
где P0 - постоянные потери (потери в стали);
82
PK - переменные потери (потери в меди).
После нахождения PСР по каталогу выбираем:
PНОМ PНОМ 1 НОМ
НОМ
Если PНОМ PСР , то по условиям нагрева двигателя выбран правильно.
2-й этап. Проверка по механической перегрузке.
По паспортным данным выбираем: МКР МНОМ
- перегрузочная способность двигателя.
МКР МНОМ ,
где МНОМ |
9550 |
PH (Hм) |
|
nH (об мин) |
|||
|
|
Критический момент выбранного двигателя должен быть будет больше наибольшего момента на самой загруженной ступени нагрузочной диаграммы.
Если нет, то выбирается двигатель больший мощности и весь расчёт выполняется заново.
3 этап: Поверка по возможности запуска.
По паспортным данным двигателя определяется:
MПУСК МНОМ КПУСК.
MПУСК М1 - момент на 1-ой ступени нагрузочной характеристики.
М1 9550 P1 n1
Иногда если требуется очень высокая точность расчётов вводиться поправочные коэффициенты, учитывающие ухудшение теплоотдачи на разных ступенях диаграммы. Однако чаще всего метод средних потерь таких уточнений не требует. Более простыми но менее точными методами являются методы эквивалентных величин.
1метод: метод эквивалентных токов;
2метод: метод эквивалентной мощности;
3метод: метод эквивалентного момента.
Метод эквивалентного тока IЭКВ : может быть использован для двигателя любого типа и конструкции, т.е. из 3-х перечисленных методов эквивалентных величин является наиболее
универсальным и точными. Если мы в формуле средних потерь заменим Pi |
K Vi |
|||||||||||||||||
K - постоянные потери мощности в двигателе (в стали) |
|
|
|
|
|
|
||||||||||||
Vi - потери в меди |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
При этом учтя что потери в меди можно представить: V' |
i |
RI2 , то P |
K RI2 |
|||||||||||||||
R - активное сопротивление двигателя. |
|
|
|
|
|
i |
|
|
СР |
ЭКВ |
||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||
Ii - ток на i-ой ступени нагрузочной диаграммы. |
|
|
|
|
|
|
||||||||||||
IЭКВ - эквивалентное значение тока за рабочий цикл двигателя. Подставив эти выражения в |
||||||||||||||||||
формулу средних потерь получим: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
K RIЭКВ2 |
|
(K RI2 )t |
1 |
....... (K RI |
2 )t |
n |
|
|
||||||||
|
|
|
|
1 |
|
|
|
|
|
n |
; |
|
||||||
|
t1 t2 ....... tn |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
IЭКВ. |
I2t |
1 |
I2t |
2 |
...... I2t |
n |
|
|
|
|
|
|
|
|
|
|
||
1 |
2 |
|
n |
|
- формула эквивалентных токов. |
|||||||||||||
|
|
t1 t2 .... tn |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Если рассчитать эквивалентный ток двигателя за рабочий цикл, то условием выбора:
IНОМ IЭКВ
83
IНОМ - по паспорту
IЭКВ - расчет эквивалентного тока по нагрузочным диаграммам.
После, этого производятся 2-й и 3-й этап.
Метод PЭКВ основан на пропорциональности: PДВ IДВ
P |
|
P2t |
1 |
P2t |
2 |
...... P2t |
n |
|
|
1 |
2 |
n |
- формула эквивалентной мощности. |
||||
|
|
|
|
|
|
|||
ЭКВ |
|
|
|
t1 t2 |
|
.... tn |
|
|
|
|
|
|
|
|
|
В отличии от метода эквивалентных токов, метод эквивалентных мощностей является менее универсальным и точным.
Для ДПТ с ПВ не применяется.
Выбор мощности производиться в следующем: PНОМ PЭКВ .
После чего производиться 3-й и 2-й этапы:
Метод эквивалентных моментов:
M ДВ PДВ
M P;
MЭКВ |
|
M |
12t1 M22t |
2 ...... Mn2tn |
|
t1 t2 |
.... tn |
||
|
|
|
Метод эквивалентных моментов ещё, менее универсален и может использовать для двигателей постоянного тока независимого возбуждения и АД в линейной части их механической характеристики. Однако, учитывая то, что чаще всего нагрузочные диаграммы задаются в координатах M(t), метод эквивалентных моментов является наиболее распространенным мето-
дом. Чаще всего для повышения точности этого метода в знаменателе выражения для MЭКВ
перед ti вводятся поправочные коэффициенты i (не путать с коэффициентом загруз-
ки)учитывающее различные значения теплоотдачи двигателя при разных скоростях вращения.
3.5.2 Выбор мощности ЭД для кратковременного режима работы S2
Если двигатель, рассчитанный на продолжительный режим работы при номинальной мощности PНОМ , тепловая диаграмма которого имеет следующий вид (рис.92) работает в крат-
ковременном режиме.
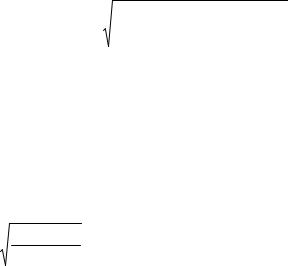
Рис. 92 Тепловая диаграмма двигателя рассчитанного на положительный режим работы
За время включения tP он успевает нагреться до температуры 1 в соответствующей точке 1. В этом случае двигатель будет недоиспользован по нагреву. что приведёт к ухудшению его энергетических показателей и как следствие «загрязнение» двигателем питающей сети. Поэтому, для того чтобы двигатель за время включения tP успел нагреться до температуры равнойДОП (т.2) необходимо увеличить нагрузку, на его валу (P PНОМ ), то 'УСТ ДОП (диаграмма
2).
84

Введем понятие коэффициента термической перегрузки, который в общем случае равен
отношению потерь мощности в кратковременном режиме ( PКР |
PНОМ ); |
||||||||||||||||||||||
потерями в номинальном режиме: |
|
|
'УСТ |
|
|
|
|
|
|
|
|
|
|
|
|
|
'УСТ |
|
|||||
P |
PКР |
|
|
|
|
УСТ |
|
ДОП |
|
|
1. |
||||||||||||
|
|
||||||||||||||||||||||
|
|
|
|
|
|||||||||||||||||||
T |
P |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
УСТ |
|
|
|
|
|
|
|
|
|
|
|
|
|
ДОП |
|
|||||
|
НОМ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Проиллюстрировав кривую 2 (рис 92): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
tP |
|
|
|
|
|
|
|||
|
|
|
|
|
|
' |
|
|
|
|
|
|
|
||||||||||
|
|
ДОП |
(1 e TH ); |
|
|
|
|
||||||||||||||||
|
|
|
|
|
УСТ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
PT |
|
|
|
|
'УСТ |
|
|
|
|
|
|
. |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
tP |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
'УСТ (1 e TH )
Если мы полученное уравнение решим относительно времени tP , то получим, что:
t |
P |
T |
H |
ln |
PT |
|
|
P 1 |
|||||||
|
|
|
|||||
|
|
|
|
|
T |
||
В паспорте двигателей, серийно выпускаемых для кратковременного режима работы, указывается номинальное время включения tP ; номинальная мощность при работе в кратковре-
менном режиме PНОМ.КР и продолжительном - PНОМ.ПР и соответственно НОМ.КР , НОМ.ПР .
Выбор мощности двигателя производится в следующий последовательности: 1. По известным паспортным данным определяется:
PT PКР ,
PП.Р
где: PКР PНОМ.КР 1 НОМ.КРНОМ.КР
PПР PНОМ.ПР 1 НОМ.ПР
НОМ.ПР
Выбрав двигатель по каталогу, постоянная времени нагрева, которого равна TH , опреде-
лим:
t |
PРАСЧ |
T ln |
PT |
; |
|
||||
|
H |
P 1 |
||
|
|
|
T |
|
tP tP.РАСЧ .
После этого производится проверка правильности выбора по кратковременной механической перегрузке и условиям пуска с помощью нагрузочной диаграммы. В кратковременном режиме работает ЭП – задвижек.
3.5.3 Выбор мощности ЭД для повторно-кратковременного режима работы
Как уже говорилось, основной характеристикой двигателей серийно выпускаемых для по- вторно-кратковременных режимов является стандартная продолжительность включения:
ПВ%СТ 15; 25; 40; 60%.
В паспорте двигателя, кроме стандартной продолжительности включения, указывается номинальная мощность МНОМ , НОМ и т.д.
Последовательность выбора мощности ЭД рассмотрим на примере наиболее общего по- вторно-кратковременного режима, а именно S5.
Режим S5включает в себя чередующиеся режимы: пуск, работу при постоянной мощности и с номинальной скоростью вращения, торможение до полной остановки, паузу, после чего цикл повторяется. Обозначим время пуска t1 , время работы при постоянной нагрузке с посто-
янной скоростью, время торможения t3 , время паузы t0 .
85
Последовательность выбора мощности следующая:
по нагрузочной диаграмме определяется реальная продолжительность включения:
ПВ% |
РАСЧЕТ |
|
t1 t2 t3 |
100 |
|
||||
|
|
t1 t2 t3 t0 |
||
Если расчетная продолжительность включения равна 70% и больше, то дальнейший выбор мощности производится также как и для продолжительных режимов с изменяющейся нагрузкой. Если расчетная ПВ не превышает 70%, то по нагрузочной диаграмме определяется эквивалентный момент. При расчете экв. момента учитывается ухудшение теплоотдачи двигателя за время пуска, торможения и паузы по сравнению с теплоотдачей при работе с постоянной номинальной скоростью:
MЭКВ |
M 2t |
1 |
M |
2t |
2 |
...... M 2t |
0 |
|
1 |
|
2 |
0 |
, |
||||
1t1 |
2t2 |
.... 0t0 |
|
|||||
|
|
|
||||||
где
1 3 0,75;
2 1;
0 0,5.
После этого по каталогу выбирается двигатель со скоростью и стандартной продолжительностью включения близкими к расчетной. После этого определяется приведенный эквивалентный момент. Если для повторно-кратковременного режима выбираем двигатель рассчитанный для работы в продолжительном режиме то выбираем ПВ%СТ 100%.
MЭКВ ПРИВ. MЭКВ. ПВ%РАСЧ .
ПВ%СТ.
Если MНОМ МЭКВ.ПРИВ , то двигатель по нагреву выбран правильно. После этого проводиться 2-й и 3-й этап выбора.
86

4 РЕГУЛИРОВАНИЕ «КООРДИНАТ» ЭП
Под термином регулирование «координат» ЭП следует понимать:
1.регулирование угловой скорости вращения.
2.регулирование момента.
3.регулирование положения.
В основном промышленные ЭП используемые в нефтегазовой и нефтеперерабатывающей промышленности нуждаются в регулировании угловой скорости, и значительно реже требует регулирование момента и положения.
Регулирование скорости вращения в ЭП
Регулированием скорости называется принудительное изменение скорости вращения вала приводного двигателя в соответствии с требованиями технологического процесса или с целью энергосбережения. Не следует смешивать понятие «регулирование» с естественным процессом изменения скорости при изменении нагрузки. Для оценки качества регулирования вводятся 6 стандартных нормативных показателей регулирования скорости:
1.диапазон регулирования
2.направление
3.плавность
4.энергетическая эффективность
5. допустимая нагрузка при регулировании
6.стабильность
1. Диапазон регулирования – является главным и обобщающим показателем качества и численно равен отношению максимальной целесообразной скорости при регулировании, к минимальной целесообразной скорости.
Д |
max |
и выражается в виде отношения двух чисел, например Д 1,5:1; 3:1 и т.д. |
|
ЛИН
2.Направление регулирования – определяет возможность изменения скорости вращения относительно так называемой основной скорости (подразумевают значение скорости находящиеся на естественной механической характеристике и равной номинальной).
а) однозонное «вниз» б) однозонное «вверх» в) двузонное
3.Плавность – этот показатель оценивает возможность использования тем или иным способом регулирования целесообразного или допустимого числа ступеней.
Количественной оценкой является коэффициент плавности:
КПЛ i
i 1
При этом регулирование будет считаться тем более плавным, чем ближеКПЛ к единице.
4. Энергетическая эффективность – характеризуется потерями мощности в процессе регулирования, а также влиянием автоматизированного ЭП на сеть и механизм.
РЕГ (НРЕГ ),Х - коэффициент мощности.
5. Допустимая нагрузка при регулировании – основывается на заданной перегрузочной способности базового элемента ЭП (ЭД), который носит название МКР , при этом при существующих условиях в процессе регулирования, момент двигателя не должен превышать критический, и кроме того, в процессе регулирования двигатель, должен быть оптимально использован по нагреву, что обеспечивается поддержанием в процессе регулирования тока, потребляемого двигателем, равным номинальному току. Поэтому этот показатель, исходя из этого оценивается целесообразностью регулирования при постоянном моменте.
87

М const (регулирование напряжением реостатное и т.д.), либо при постоянной мощности на валу двигателя P const(регулирования магнитным потоком).
6. Стабильность регулирования. С помощью этого показателя оценивается устойчивость работы ЭП на разных скоростях.
При этом стабильность тем больше, чем выше жесткость рабочей части регулировочной характеристике по отношению к естественной характеристике.
Например:
Характеристика 1- естественная характеристика 2 и 3 – регулировочные.
3-я характеристика более жесткая (стабильность выше).
Рис.93 Механические характеристики ЭП
4.1 Регулирование скорости ДПТ с НВ
|
U |
|
R |
М |
|
K2Ф2 |
|||
|
KФ |
|
||
При анализе этого уравнения не трудно сделать вывод, что возможно 3 способа регулирования:
1.реостатное регулирование R var(RДОБ Var )
2.регулирование магнитным потокомФ Var(RВ Var)
3.регулирование напряжением на зажимах якоряU Var
Схема реостатного регулирования ДПТ с НВ аналогична схеме реостатного пуска рассмотренного в предыдущем курсе. Однако при этом реостаты вводимые в цепь якоря по сравнению с пусковыми реостата должна быть рассчитаны на более длительную работу.
Рис.94 Схема реостатного регулирования ДПТ с НВ
При изменении добавочного сопротивления вводимого в цепь якоря регулировочные характеристики будут иметь вид:
88
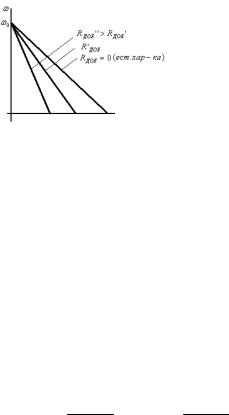
Рис.95 Регулировочные характеристики ДПТ с НВ при реостатном регулировании
Показатели качества регулирования:
1.направление однозонное «вниз»
2.стабильная низкая
3.плавность – зависит от числа ступеней, но в целом - низкая
4.допустимая нагрузка на валу. Как уже говорилось, в процессе регулирования, должно быть выполнено условие использования двигателя по нагреву, что достигается поддержанием тока якоря равным номинальному. Так как при реостатном регулировании поток постоянен, то
МКФI const . т.е. реостатное регулирование относится к регулированию скорости при постоянном моменте.
4.Энергетические показатели. При реостатном регулировании P P1 PМЕХ.
P1 мощность потребляемая из питающей сети P1 0М
P 0М М 0 0М Р1 0
0 0
Таким образом, потери мощности в двигателе при реостатном регулировании можно представить как произведение мощности на относительный перепад скорости. Отсюда видно, что при уменьшении угловой скорости в 2 раза потери мощности будет составлять 50%, т.к. реостатное регулирование энергически не эффективно.
Учитывая очень низкие показатели электрические показатели и эффективность составит:
Д 1,5 1
Определим величину добавочного сопротивления. которое необходимо ввести в цепь якоря для того чтобы уменьшить угловую скорость вращения: НОМ 2
|
|
|
|
|
|
|
|
|
|
U RЯ IНОМ |
|
|
|
|
|
||
|
|
|
|
|
НОМ |
|
|
|
|
|
|
|
|
||||
|
|
|
|
KФ |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
2 |
|
U (RЯ RДОБ )IНОМ |
|
||||||||||||
|
|
|
|
|
|
|
KФ |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
2 |
|
|
|
U (RЯ RДОБ )IНОМ |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
НОМ |
|
|
|
U RЯ IНОМ |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
RДОБ (1 |
0 |
|
)( |
|
|
U |
|
RЯ ) (1 |
|
2 |
)(RНОМ |
RЯ ) |
|||||
НОМ |
IНОМ |
|
|
|
|||||||||||||
|
|
|
|
|
НОМ |
|
|||||||||||
Существуют способы, с помощью которых можно улучшить некоторые показатели реостатного регулирования.
Например: плавность. С этой целью используют так называемое импульснопараметрическое регулирование.
89
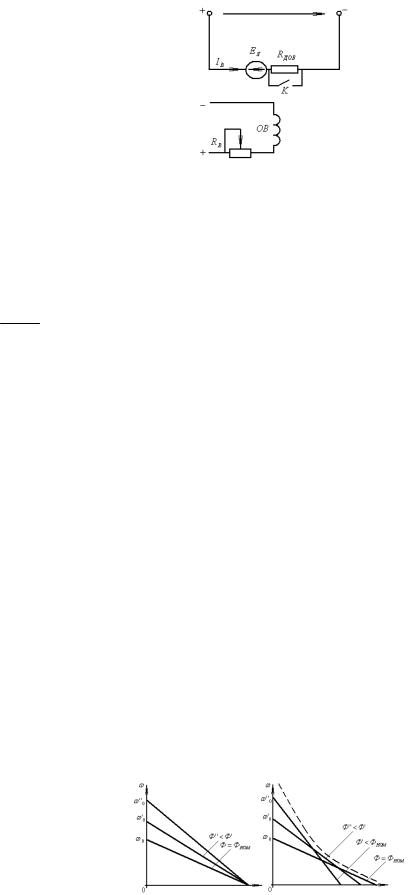
Рис. 96 Схема при импульсно-параметрическом регулировании
Сущность заключается в том, что в цепь якоря вводится одноступенчатое добавочное сопротивление, которое с высокой частотой, примерно р 600-800Гц, попеременно вводиться в
цепь якоря (ключ к находится в разомкнутом состоянии) и выводится (К замкнут). При этом
Т1- замкнутого состояния ключа, T2 - время разомкнутого состояния.
К- представляет из себя силовой ключ (транзистор или тиристор). При этом величина
равная t1 - называется скважность. t1 t2
При этом изменяется соотношение t1 |
и t2 ,но T t1 t2 |
const . При изменении изменя- |
|||
ется RСР , |
|
|
|
|
|
RСР RДОБ (1 ) , а уравнение механической характеристики, принимает вид: |
|||||
|
U |
RДОБ (1 ) |
М |
||
|
|
|
|
|
|
|
K2Ф2 |
||||
|
KФ |
|
|||
Изменяя 0 1 можно регулировать скорость вращения с высокой степенью плавности.
2. Регулирование скорости изменением магнитного потока Ф Var .
Этот способ регулирования реализуется с помощью изменения тока возбуждения. Учитывая то, что цепь возбуждения является слаботочной, то изменение тока можно производить плавно:
|
|
|
|
|
|
|
U |
|
|
R |
|
I |
|||||
|
|
|
|
|
KФ |
KФ |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
U |
|
|
R |
|
M |
|||||||
|
|
|
|
|
K2Ф2 |
||||||||||||
|
|
|
|
|
|
KФ |
|
||||||||||
Из этих уравнений видно, что при изменении потока, изменяется 0 (скорость идеализи- |
|||||||||||||||||
рованного х.х.): |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
U |
и перепад скоростей |
R |
I |
|
R |
M . |
||||||||
0 |
|
|
|
|
|
||||||||||||
KФ |
KФ |
K2Ф2 |
|||||||||||||||
|
|
|
|
|
|
|
|
||||||||||
При этом семейство характеристик будет следующего вида:
а) б)
Рис. 97 Электромеханическая (а) и механическая (б) характеристики при изменении магнитного потока
Следует отметить то, что возрастание потока относительно номинального возможно только в очень небольших пределах в силу того что магнитный поток ДПТ находится в состоянии
90