

ТЭП-Курс_лекций_04-2006
.pdfРис.47 Механическая характеристика АД - f (M)
Эти характеристики, отличаются от экспериментальных механических характеристик тем, что реальный пусковой момент MП несколько больше, чем расчётный, при скольжении
S 1.
Реальные механические характеристики имеют некоторый провал в области скольжения S 1. Это связанно с тем, что в расчётных характеристиках построенных с помощью формулы Клосса не учитываются конструктивные особенности двигателя, направленные на улучшение их пусковых свойств (двигатель с глубоким пазом или с роторной обмоткой типа беличьего колеса). Части характеристик, описывающих устойчивую работу (рабочие части характеристик) при скольжении 0 S SK практически точно совпадают.
Построение искусственных механических характеристик с использованием формулы Клосса несколько затруднительно в связи с тем, что для этого требуется уравнения зависимостей:
а) SK f (RДОБ ) ; б) SK f (U); в) SK f ( f ).
Достаточно точно эта зависимость может быть определена только для случая (а).
S |
K И |
S |
K Е |
|
R2 RДОБ |
, |
||||||
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
R2 |
|||||
|
M |
|
|
|
2MK |
|||||||
|
|
S |
|
|
|
SK И |
|
|
||||
|
|
|
|
|
|
|
|
|
||||
SK И S
2.5.2 Пуск АД
Асинхронные двигатели с КЗ ротором является наиболее простым, дешевым и одним из самых надёжных типов ЭД, следовательно, в промышленности находят наиболее широкое применение.
При пуске в начальный момент АД обеспечивает достаточно большое значение момента. Для ЭП малой мощности к тому же не обладают большими пусковыми токами, следовательно,
вАД с КЗ ротором малой мощности используют прямой пуск.
ВЭП средней и большой мощности задача пуска несколько сложнее. Это связано с тем, что электромагнитный момент выражается зависимостью:
M CЭМФI2Cos , (36)
где CЭМ - конструктивная электромагнитная постоянная двигателя, которая зависит от
числа пар полюсов двигателя и способов наматывания статорной и роторной обмотки; Ф - основной магнитный поток;
I2 - ток в роторе;
41

Cos - угол сдвига фаз между ЭДС и током ротора.
При этом, в уравнении (36) не учитывается влияние на магнитный поток Ф скорости и угла поворота ротора.
Уравнение (36) можно проиллюстрировать следующей векторной диаграммой (рис. 48).
Рис.48 Векторная диаграмма
Сдвиг фаз между ЭДС E и током I определяется активным и индуктивным сопротивлением обмотки ротора. При этом известно, что это соотношение изменяется при изменении скорости вращения ротора. И, в частности, при неподвижном роторе, фазовый сдвиг между ЭДС ротора E2 и током ротора I2 будет наибольшим (предельным для двигательного режима), т.е.
скольжение S 1, f2 f1S f1.
Величина индуктивного сопротивления XL2 будет наибольшей. Будет иметь место эффект вытеснения тока I , следовательно, уменьшается эффективное сечение проводника и увеличится индуктивное сопротивление. В результате чего Cos 2 0, что приведёт к понижению пускового момента. Кроме того, при неподвижном роторе относительная скорость пересечения силовыми линиями магнитного поля витков ротора также будет наибольшей.
ЭДС в обмотке ротора:
e2 LdФ , dt
где dФ - скорость изменения магнитного потока. dt
Величина пускового тока IПУСК 5 10IНОМ , что может привести к перегреву двигателя.
При запуске АД в ЭП средней и большой мощности основными задачами являются:
1)ограничение пускового тока I (снижение броска токаI );
2)увеличение пускового момента M .
Если внимательно изучить уравнение (32), но нетрудно убедиться, что 1-ая задача может быть решена введением RДОБ активного в цепь ротора, что позволяет:
а) снизить I2 ;
б) увеличить составляющую Cos , и, как следствие, увеличить пусковой момент.
Этот способ может быть применен только для двигателя с фазным ротором. При этом пусковые характеристики представляют собой семейство реостатных характеристик, где число ступеней чаще всего известно заранее.
Последовательность реостатного пуска
Рассмотрим последовательность реостатного пуска на рис. 49.
42

Рис.49 Семейство пусковых реостатных характеристик АД
На рис.49:
M1 - «пиковый» момент, при котором начинается работа на новой механической характе-
ристике (т.3, 5, 7, 9);
M2 - момент переключения, при котором происходит переход на новую механическую характеристику (т.2, 4, 6, 8).
В момент подключения статорной обмотки к питающей сети ступенчатое добавочное сопротивление RДОБ введено в цепь ротора полностью (т.1.). По мере разгона ротора угловая ско-
рость возрастает, а относительная скорость перемещения силовых линий магнитного поля относительно роторной обмотки уменьшатся, следовательно, ЭДС и ток якоря E2 и I2 уменьшаются. Поэтому уменьшается и момент M .
Для поддержания дальнейшего разгона двигателя отключают одну ступень (в т.2.), после чего характеристика переходит в точку 3. Далее разгон по 2-ой характеристике до т.4. После чего отключается следующая ступень, рабочая точка переходит в т. 5, и т.д. Разгон заканчивается на естественной характеристике в т.a, при номинальных значениях скорости НОМ и мо-
мента MНОМ .
Впроцессе разгона вращающий момент M должен находиться в пределах:
1.11.2MC M 0.85MK
Пуск может быть:
- форсированным (повышенные требования к длительности процесса запуска), M2 и M1 , смещены вправо;
- нормальным (повышенные требования к термическому состоянию двигателя ), M2 и
M1 смещены влево.
Двигатель с КЗ ротором в зависимости от мощности и перечисленных требований к процессу запуска может быть запущен следующими далее методами.
1. Переключение со звезды в треугольник. При пуске статорная обмотка соединяется в звезду (пусковой ток IПУСК уменьшается в 3 раза). При работе - соединяется в треугольник.
Этот способ практически не обеспечивает увеличение момента M при пуске.
2.Реакторный пуск заключается в том, что на время пуска в цепь статора вводиться токоограничивающие реакторы.
3.Автотрансформаторный: в цепь статора вводится трехфазный автотрансформатор. Запуск начинается при минимальном напряжении статорной обмотки, а заканчивается при номинальном.
Однако, в настоящее время наиболее эффективным способом запуска АД с КЗ ротором является частотный запуск.
Для этого в цепь статора включается частотный преобразователь. Пуск начинается при минимальной частоте. Это позволяет уменьшить пусковой ток и повысить пусковой момент (см. семейство частотных характеристик). Одновременно с частотой изменяют напряжение.
43
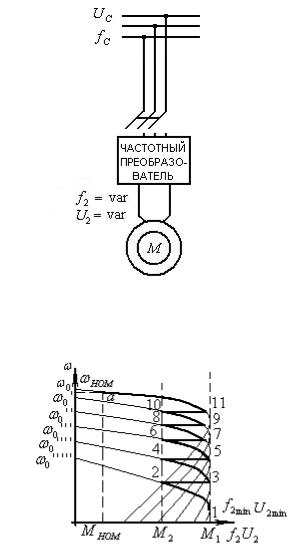
Рис.50 Схема частотного пуска
Рис.51 Семейство пусковых характеристик АД при изменении частоты
Минимизация пусковых токов реализуется за счёт уменьшения действующего значения напряжения в начале пуска. Однако, при этом уменьшается также и пусковой момент. В то же время известно, что пусковой момент тем больше, чем меньше частота питающего напряжения. Таком образом, уменьшение пускового момента, при уменьшении напряжения, компенсируется уменьшением частоты.
По мере разгона двигателя ступенчато уменьшают частоту f2 и напряжение ротора U2 . Пуск заканчивается на естественной механической характеристике (рабочая точка a), при скорости НОМ и моменте M MНОМ .
При этом, плавность процесса пуска обеспечивается равенством пусковых моментов и моментов переключения на всех ступенях пуска (M1 const , M2 const ).
Форсированный или нормальный пуск обеспечивается начальным значением частоты и за счёт изменения шага частоты. Чем меньше начальное значение частоты, тем больше пиковый момент.
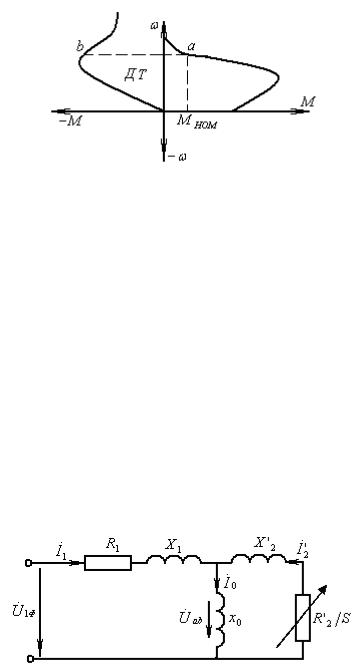
2.5.3 Тормозные режимы АД. Механические характеристики в тормозном режиме
Существует 3 основных электрических способа торможения АД:
-рекуперативное торможение;
-торможение противовключением;
-динамическое торможение.
44
Общим признаком всех трех перечисленных тормозных режимов является одинаковость направлений потока энергии, в частности, направление потока энергии в части силового канала «механизм - двигатель». Поток энергии в этой части силового канала направлен от механизма к двигателю, т.е. с этой точки зрения, все три перечисленных способа можно отнести к генераторному режиму.
Рекуперативное торможение
Условие возникновения рекуперативного режима: 0 , т.е. ротор вращается с большей скоростью, чем магнитное поле.
При этом скольжение: S 0 становится отрицательным.
0
В результате, изменяется соотношение направления пересечения силовых линий магнитного поля витков ротора, поэтому изменяется знак ЭДС E2 в обмотке ротора (ЭДС<0). Ток ротора становится меньше 0, следовательно, изменяется знак вращающего электромагнитного момента (меньше 0), т.е. момент по отношению к угловой скорости изменяет свое направление и становится тормозным. Логическим выводом этого будет то, что механическая характеристика является продолжением естественной и располагается во втором квадранте.
Рис.52а Рекуперативное торможение АД
При этом изменит своё направление также и ток статора, поэтому в части силового канала «источник электрической энергии – двигатель» энергия направлена от двигателя к источнику, т.е. ЭД работает в генераторном режиме.
При рекуперативном торможении механическая энергия от механизма передаётся двигателю. При этом большая часть этой энергии возвращается в питающую сеть в виде электрической, а остаток рассеивается в двигателе , в виде тепла.
Рекуперативный режим с целью торможения имеет весьма ограниченную область применения: обеспечение плавности при спуске грузов в ЭП грузоподъемных механизмов.
Для практического применения режим рекуперативного торможения может быть реализован за счёт изменения соотношения 0 на 0 .
Существует две возможности достижения этого соотношения:
1)увеличение числа пар полюсов p , при этом 0 2 f  2p;
2p;
2)изменение частоты f .
1. Увеличивают число пар полюсов в два раза.
45
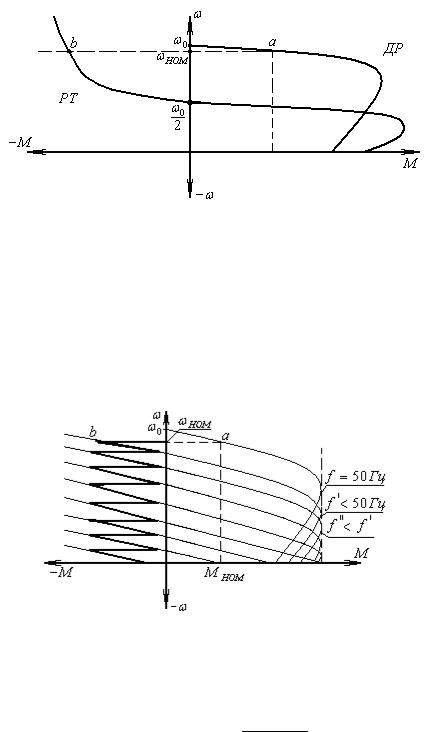
Рис.52б Реализация рекуперативного торможения увеличением числа пар полюсов
Этот способ позволяет уменьшить 0 в 2 раза, что не позволяет практически полностью оставить двигатель в рекуперативном режиме.
2. Увеличивают частоту. Первый скачок частоты должен быть насколько велик, чтобы рабочая точка перешла во второй квадрант, а остальные настолько малы, чтобы характеристика вновь не вернулась в 1-ый.
Кроме того, необходимым условием реализации генераторного режима по отношению к сети является возможность обратной проводимости в элементе, связывающим двигатель с сетью.
Рис.53 Реализация рекуперативного торможения снижением частоты
Режим противовключения. Торможение противовключением
Если под действием активного источника механической энергии изменить направление
вращения вала двигателя на противоположное, то S 0 ( ) 1.
0
При этом ЭДС в обмотках ротора E2S станет больше, чем E2 (т.е. больше, чем ЭДС в об-
мотках неподвижного ротора), следовательно I2 IК.З . Момент M MK , (при этом M своего
направления не изменит), однако по отношению к изменившемуся направлению скорости становится отрицательным, т.е. тормозным.
При этом направление потока энергии в части силового канала «механизм-двигатель» становится отрицательной, т.е. поток направлен от механизма к двигателю. Поток энергии в части канала «сеть-двигатель» направлен от сети к двигателю. Сумма двух этих потоков рассеивается в двигателе в виде тепла. Таким образом, этот режим является наименее энергетически эффективным, и в приводах большой мощности зачастую ведет к аварийным режимам.
46
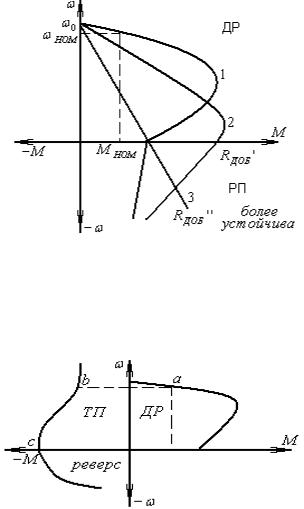
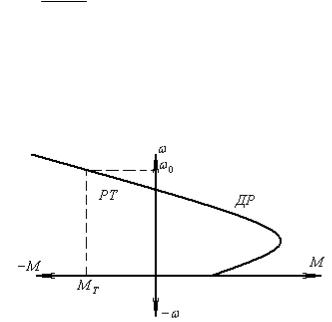
Рис.54 Режим противовключения (РП)
Механическая характеристика в режиме противовключения является продолжением естественной механической характеристики в четвертом квадранте, и описывается тем же уравнением. Обычно, при использовании этого режима, в целях торможения, в цепь ротора вводят добавочное сопротивление.
Рис.55 Реализация торможения противовключения изменением последовательности чередования фаз
В рассмотренном варианте режим противовключения практически может быть использован только для обеспечения плавности при спуске и подъёме грузов.
Наряду с перечисленными отрицательными качествами режима противовключения, существует неоспоримое достоинство - возможность реверса. Поэтому, с этой целью, а также с целью быстрой остановки двигателя, в приводах малой мощности режим противовключения находит практическое применение. Для этого изменяют последовательность чередования фаз статорной обмотки, подключённой к источнику питания. Это приводит к изменению направления магнитного поля, следовательно, изменяется направление ЭДС и тока в обмотке ротора, и направление момента станет противоположным, т.е. тормозным (M MT ).
Динамическое торможение
Динамическое торможение в настоящее время является наиболее универсальным способом торможения, поэтому находит широкое применение. При реализации этого способа торможения 3-х фазную статорную обмотку отключают от 3-х фазного источника переменного напряжения и 2-х фазы обмотки статора подключают к источнику постоянного напряжения. В результате в обмотке статора формируется статическое магнитное поле, при взаимодействии которого с вращающимся ротором возникает электромагнитный момент. Этот момент, в соответствии с принципом Ленца, направлен противоположно направлению вращения и является тормозным. Рабочая точка характеристики переходит во 2-ой квадрант, где под действием отрицательного момента двигатель останавливается. Остановка происходит при нулевом моменте ( 0, M 0). Главное отличительное качество динамического торможения - точность.
47
Интенсивность процесса динамического торможения зависит от величины приложенного постоянного напряжения и от величины добавочного сопротивления, включаемого в цепь статора (для предотвращения перегрева двигателя, т.е. для ограничения тока).
Рис.56 Механическая характеристика АД при динамическом торможении
Так как момент изменяет своё направление, а угловая скорость нет, то произведение момента и угловой скорости отрицательно, следовательно, поток механической энергии направлен от механизма к двигателю, т.е. в паре «двигатель-механизм» (со стороны механизма), режим динамического торможения является генераторным.
При этом вся преобразованная энергия рассеивается в двигателе. Энергия постоянного напряжения идёт на создание статического магнитного потока.
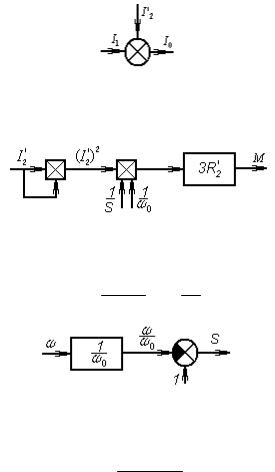
2.5.4 Моделирование ЭП с АД. Асинхронный двигатель, как объект управления. Динамическая модель АД в переменных «входы - выходы»
Математическая модель АД должна представлять собой систему уравнений, описывающих все физические процессы, происходящие в АД (электромагнитные и механические).
Модель в переменных «входывыходы» будем представлять для одной фазы двигателя. Простейшим инструментом для составления системы уравнений, описывающих электромагнитные процессы АД, является электрическая схема замещения. Наиболее удобна Т-образная приведенная схема замещения АД с учётом механической нагрузки на валу двигателя.
Рис.57 Приведенная Т-образная схема замещения АД с учётом механической нагрузки на валу двигателя
Запишем уравнения для данной схемы. Уравнения контуров:
. |
|
|
jX1I1 Uab , |
|
||
U1Ф I1R1 |
(37) |
|||||
Uab |
|
I'2 |
R'2 |
jX' |
2 I'2 |
(38) |
|
|
|||||
|
|
S |
|
|
||
Уравнение электрического равновесия ветви намагничивания:
Uab jX0I0 |
(39) |
||||
Уравнение движения: |
|
d |
|
|
|
M MC |
J |
. |
(40) |
||
|
|||||
|
|
dt |
|
||
48
Уравнение по 1-му закону Кирхгофа: |
|
|
|
|
|
|
|
|
|
I1 I2 I0 . |
|
(41) |
|||||||
Уравнение момента: |
|
|
|
|
|
|
|
|
|
M |
|
R' |
2 |
I'2 |
2 |
. |
(42) |
||
0S |
|
||||||||
Скольжение: |
|
|
|
|
|
||||
|
0 |
|
|
|
|
|
|||
S |
. |
|
(43) |
||||||
|
|
|
|||||||
|
|
|
0 |
|
|
|
|
|
|
Заменим в уравнениях (37)-(39) X на L.
Запишем уравнения (37)-(39) и (43) в операторной форме.
U1Ф I1R1 pL1I1 |
Uab |
(44) |
||
Uab |
I'2 R'2 |
pL2I'2 |
(45) |
|
|
||||
|
S |
|
|
|
Uab pL0I0 |
(46) |
|||
M MC Jp |
|
(47) |
||
Для того, чтобы представить динамическую модель в переменных «входы-выходы» необходимо:
1)выбрать входные и выходные переменные;
2)решить каждые из уравнений (41) - (47) относительно одной из переменных и представить графический образ каждого уравнения;
3)объединить графические образы семи уравнений в один, в соответствии с поставленной задачей, получив структурную схему модели в переменных «входы-выходы».
Итак, представим графический образ уравнения (41).
Рис.58а Динамическая модель Схема, соответствующая уравнению (42), представлена на рис.58б.
Рис.58б Динамическая модель Преобразуем уравнение (43) и представим его графический образ.
S0 1
0 0
Рис.58в Динамическая модель
Решим уравнение (44) относительно I1:
I1 U1Ф Uab . R1 pL1
Введем коэффициент пропорции k1 и постоянную времени T1 :
49

1 k1 R1 ,
T1 L1 .
R1
Тогда уравнение примет вид:
I |
1 |
|
U1Ф Uab |
|
U1Ф Uab |
|
|
(U1Ф Uab ) k1 |
. |
||
|
|
|
|
||||||||
|
|
R pL |
R |
(1 p |
L1 |
) |
|
1 pT |
|||
|
|
1 1 |
|
|
1 |
|
|||||
|
|
|
|
||||||||
|
|
|
|
|
1 |
|
R1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис.58г Динамическая модель
Решим уравнение (45) относительно I2 :
I' |
|
|
|
Uab |
|
|
|
Uab |
|
|
|
Uab S k2 |
, |
|
|
|
|
|
R'2 |
|
L2 |
|
|||||||
|
2 |
|
|
R'2 |
pL2 |
|
|
(1 Sp |
|
1 SpT |
||||
|
|
|
|
S |
|
|
S |
R'2 ) |
2 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где k2 - коэффициент пропорции,
1 k2 R2 ;
T1 - постоянная времени,
T2 L2 .
R2
Рис.58д Динамическая модель Схема, соответствующая уравнению (46), представлена на рис.58е.
Рис.58е Динамическая модель Графический образ, соответствующий уравнению (47), показан на рис.58ж.
Рис.58ж Динамическая модель
Для построения общей структурной схемы объединим полученные выше графические образы.
50