

ТЭП-Курс_лекций_04-2006
.pdfРис.18 Семейство пусковых реостатных характеристик
Рис.19 Семейство пусковых характеристик при изменении напряжения
Необходимо отметить, что ступени должны рассчитываться так, чтобы на каждой ступени пуска обеспечивалось соответствие типовых точек (M1 const , M2 const ), для обеспечения плавности процесса.
2.2.3Механические характеристики ДПТ с НВ в тормозных режимах
Кспособам искусственного электрического торможения ДПТ с НВ относятся:
1)рекуперативное;
2)противовключением;
3)динамическое.
Во всех трех случаях со стороны механизма двигатель работает в режиме потребления энергии.
Рекуперативное торможение
Рекуперативное торможение характерно тем, что в момент торможения скорость вращения вала двигателя больше чем скорость вращающегося магнитного поля, т.е. 0 , это имеет место в том случае, если двигатель работает в режиме спуска груза. В этом случае статический момент сопротивления MC направлен в одну сторону с основным моментом M , и под дейст-
вием суммарного момента M MC , двигатель вращается с большей скоростью, чем 0 . При этом ток I в цепи изменяет своё направление и, соответственно, изменяет своё направление и момент M KФ( I) 0, т.е. момент становится тормозным M MT .
21

Рис.20 Рекуперативное торможение при спуске груза
Таким образом, рассмотренный способ может применяться только при спуске груза. Практическое применение для остановки двигателя возможно при снижении напряжения. Если последовательно уменьшать напряжение, подводимое к якорю, то можно в режиме рекуперативного торможения полностью остановить двигатель.
Рис.21 Рекуперативное торможение при снижении напряжения
Уравнение движения будет иметь вид:
|
U |
|
R |
М |
|
|
k2Ф2 |
|
|||
|
kФ |
|
|
||
В процессе рекуперативного торможения потоки энергии в ЭП направлены следующим |
|||||
образом. Кинетическая энергия вращения вала |
направлена |
от механизма к двигателю: |
|||
M E( I). Электрическая энергия, которую мы выражаем |
U( I), также изменит своё на- |
||||
правление и будет направлена от двигателя к источнику электрической энергии, т.е. двигатель по отношению к механизму и по отношению к источнику напряжения (источнику питания) работает в генераторном режиме с отдачей энергии в сеть. Этот режим является наиболее энергетически эффективным, следовательно, наиболее экономичным. Энергия рассеивания, пропорциональная квадрату тока I2 и сопротивлениюR цепи якоря, своего направления не меняет, т.е.
RI2 const .
Т.о. уравнение энергетического баланса ЭП при рекуперативном торможении имеет вид:
UI EI RI2
Торможение противовключением
Режим противовключения может возникнуть, когда в результате увеличения нагрузки на валу двигателя, скорость вращения начинает понижаться, и при некоторой величине нагрузки двигатель останавливается: 0(режим КЗ). Если продолжать увеличение нагрузки на валу двигателя, то направление вращения изменится на противоположное (при сохранении знака момента), а механическая характеристика из 1-го квадранта (двигательный режим) перейдет в 4-ый (режим противовключения). Изменение направления вращения двигателя называется ре-
версом.
Уравнение характеристики:
22

|
|
|
|
|
0 |
|
U |
|
R |
|
M |
|
|
|
|
|
|
|
2 |
2 |
|||||
При M MK : |
0. |
|
|
|
kФ |
k Ф |
|
|
||||
|
|
|
|
|
|
|
|
|||||
При M MK : |
|
U |
|
R |
|
M , 0. |
|
|
|
|||
|
|
2 |
2 |
|
|
|
||||||
|
|
kФ |
k Ф |
|
|
|
|
|
|
|
|
|
Рис.22 Переход из двигательного режима в режим противовключения
В рассмотренном случае режим противовключения не применяется для замедления скорости вращения двигателя, а используется в грузоподъемных механизмах для обеспечения плавности спуска грузов, т.к. момент М направлен против направления скорости и по отношению к ней является тормозным.
Практическое применение этого режима в качестве тормозного: изменяется соотношение направлений тока I и магнитного потока возбуждения Ф, следовательно, электромагнитный момент, в соответствии с правилом левой руки, изменяет своё направление, и по отношению к скорости становится тормозным.
Для этого необходимо изменить полярность напряжения якоря или обмотки возбуждения (чаще изменяют напряжение якоря). Для двигателя параллельного возбуждения это невозможно, т.к. при изменении полярности обмотки якоря, изменяется и полярность обмотки возбуждения. При этом изменяется направление I в цепи якоря, и, одновременно, при неизменном магнитном потоке, изменяет своё направление вращающий электромагнитный момент. Следовательно, момент по отношению к скорости становится отрицательным, т.е. тормозным. Ток в цепи якоря:
I U E IКЗ
R
Рис.23 Механическая характеристика ДПТ с НВ при торможении противовключением
После изменения полярности обмотки якоря момент становится отрицательным, и точка a перемещается в точку b . Двигатель начинает тормозиться, скорость уменьшается, и наклон в точке c зависит от сопротивления R цепи якоря. Торможение продолжается до точки c ( 0). Если после этого не выключить двигатель из сети, то он реверсируется. Таким образом, учитывая, что для некоторых технологических процессов изменение направления необходимо, возможность реверса является в ряде случаев преимуществом торможения противовключения.
23

Кинетическая энергия вращения вала (вращения механизма) отрицательна, т.е. энергия направлена от механизма к двигателю. Электрическая энергия UI своего знака не изменяет, т.к. ( U)( I) UI . Энергия рассеивания RI2 своего знака не изменяет. Уравнение энергетического баланса:
UI EI RI2 или UI EI RI2 .
Т.о. и электрическая энергия, потребления двигателем из сети, и механическая энергия, потребляемая двигателем от механизма, рассеиваются в виде тепла, этот режим наименее энергетически благоприятен.
Если учесть, что ток якоря I в процессе торможения противовключением больше чем ток короткого замыкания IКЗ , и момент достигает очень больших значений, то можно сделать вы-
вод, что торможение противовключением для приводов большой мощности не применимо, т.к. может привести к выходу двигателя из строя.
Динамическое торможение
Якорная обмотка двигателя отключается от источника питания сети и замыкается на тормозное сопротивление, т.е.:
U 0,
R RЯ RT ,
I |
E |
0. |
|
(RЯ RT )
При сохранении потока, момент М kФ( I) 0, и по отношению к направлению скорости момент становится тормозным, и рабочая точка перемещается из а в b. Под действием тормозного момента MТ двигатель замедляется и останавливается:
0,
E kФ 0,
I E 0,
(RЯ RT )
M IkФ 0.
Рис.24 Механическая характеристика ДПТ с НВ при динамическом торможении
Главное достоинство динамического торможения - точная остановка двигателя (при
0, M 0).
Уравнение механической характеристики:
0 |
R |
|
M |
RM |
. |
2 |
2 |
2 2 |
|||
|
k Ф |
|
|
k Ф |
|
Наклон механической характеристики зависит от величины тормозного сопротивления, которое вводится для ограничения тока I якоря и предотвращения перегрева двигателя.
UI 0,
24

EI M RI2 .
Т.о. вся механическая энергия, потребляемая двигателем от механизма, рассеивается в виде тепла в двигателе:
0 EI RI2 .
2.2.4 ДПТ с НВ, как объект управления. Динамическая модель ДПТ с НВ в переменных «входы-выходы». Аналоговый вариант
Задача: представить динамическую модель ДПТ с НВ в переменных «входы-выходы» в виде структурной схемы. Для этого представим систему уравнений, описывающих электромагнитные и динамические процессы, происходящие в ДПТ с НВ.
Уравнение магнитного потока возбуждения: |
|
|
||
Фi f (iВ ) сiВ . |
|
(19) |
||
Уравнение равновесия обмотки возбуждения: |
|
|
||
UВ RВiВ LВ piВ , |
(20) |
|||
где iВ - ток обмотки возбуждения; |
|
|
||
RВ - активное сопротивление обмотки возбуждения; |
|
|||
LВ - индуктивность обмотки возбуждения; |
|
|
||
p - оператор дифференцирования; |
|
|
||
UВ - напряжение, приложенное к обмотке возбуждения. |
||||
Уравнение равновесия обмотки якоря: |
|
|
||
UЯ RЯiЯ eЯ LЯ piЯ |
(21) |
|||
Уравнение ЭДС в обмотке якоря: |
|
|
||
eЯ kФ |
(22) |
|||
Конструкционная постоянная машины k : |
|
|
||
k |
pП N |
, |
|
|
|
|
|
||
|
2 a |
|
|
|
где pП - число пар полюсов; |
|
|
||
N - число активных проводников; |
|
|
||
a - число параллельных ветвей. |
|
|
||
Уравнение электромагнитного момента: |
|
|
||
M kФВiЯ |
(23) |
|||
Уравнения (19) - (23) соответствуют определению математической модели (описанию) ДПТ с НВ. Определение параметров в уравнении (19) - (23) по паспортным данным двигателя рассмотрены в курсе ЭП.
Индуктивность якорной цепи можно грубо определить:
LЯ (0.25 0.6)UНОМ
pН НОМ IЯ.НОМ
В этом уравнении коэффициент 0.25 0.6 выбирается исходя из их номинальной мощности. Так, например, у двигателя мощностью 200 кВт этот коэффициент 0.5, с увеличением мощности коэффициент увеличивается. Для определения параметров в цепи возбуждения - тока и сопротивления обмотки возбуждения, iВ и RВ соответственно, обычно требуются сведения, не сообщающиеся в общедоступных каналах, такие как число витков, соединение обмоток полюсов. Чаще всего для этих целей используют кривые намагничивания, которые характеризуют материал, из которого изготовлен сердечник статора.
Для более грубой оценки пользуются постоянной времени обмотки возбуждения:
25

TВ iВ kВ
Рис. 25а Кривая намагничивания
Рис.25б Зависимость постоянной времени ОВ от мощности
Чаще, в соответствии с принципом поставленных задач, принято считать, что в процессе работы привода изменения вносятся либо в обмотку возбуждения, либо в обмотку якоря. В этом случае задача по совместному решению уравнений (19) - (23) значительно упрощаются.
Представим динамическую модель ДПТ с НВ в виде структурной схемы в переменных «входы-выходы», при Ф ФНОМ , и UВ UВ.НОМ , выбрав в качестве входных переменных UЯ и
.
Тогда:
XВХ UЯ ,
XВЫХ М
|
|
|
|
|
|
|
|
|
|
UЯ (p) |
|
|
RЯ |
|
(1 ТЯ p)M(p), |
|||
|
|
|
|
|
|
|
|
|
|
|
2 2 |
|
||||||
|
|
|
|
|
|
|
|
|
|
kФ |
k Ф |
НОМ |
|
|
||||
|
|
|
iЯ |
|
UЯ |
|
|
|
НОМ |
|
|
|
|
|||||
где Т |
Я |
|
, |
|
0 |
, |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||||||||
R |
|
kФ |
|
|
|
|
|
|
|
|
|
|||||||
|
|
Я |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
НОМ |
|
|
|
|
|
|
|
|
|
|
|
|
||
- статическая жесткость, |
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
(kФ |
НОМ |
)2 |
. |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
RЯ
Рис. 26 Структурная схема динамической модели ДПТ с НВ
Задачи.
26

1. Введя понятие «динамическая жесткость,» которая равна |
дин |
|
dM |
и определив |
|
||||
ДИН (p), составить структурную схему с учётом ДИН : |
|
d |
||
|
|
|
|
|
|
|
ДИН (p) |
M(p) |
|
|
|
|
||
|
|
|
(1 TЯ (p)) |
|
|||||
|
|
|
|
|
(p) |
|
|||
2. Представить динамическую модель в переменных «входывыходы»: |
|
||||||||
а) |
XВХ |
UЯ , XВЫХ . |
|
XВЫХ . |
|
||||
б) |
XВХ |
R RЯ RДОБ , где RДОБ |
var, |
|
|||||
в) |
XВХ |
ФВ , XВЫХ . |
|
|
|
|
|
|
|
3. |
Представить динамическую |
модель |
|
в переменных состояния, приняв U UЯ , |
, |
||||
U M .
2.2.5Энергетические режимы в ЭП с ДПТ с НВ
Спомощью статической механической характеристики для любой точки в плоскости координат и M можно однозначно определить энергетический режим ЭП, а именно, направление потоков энергии и соответствующие им значения электрической и механической мощно-
сти. При этом будем считать, что напряжение в цепи якоря равно номинальному U UНОМ ,
магнитный поток равен номинальному Ф ФНОМ , и в цепь якоря введено добавочное сопро-
тивление R RЯ RДОБ (RДОБ const ). Примем, что момент является переменной величиной,
который будем изменять с помощью некоторого активного механического устройства, находящегося на валу ЭД и скорость будет принимать значения, соответствующие этому моменту.
Запишем уравнения основных функций:
E kФ ;
I U E
R
M IkФ P .
Построим при этих условиях статическую механическую характеристику:
|
U |
|
R |
M |
|
k2Ф2 |
|||
|
kФ |
|
||
Рис.27 Энергетические режимы ДПТ с НВ
27

Согласно рис.27 можно выделить 6 режимов:
1)ХХ – режим холостого хода;
2)ДР - двигательный режим;
3)КЗ – режим короткого замыкания;
4)РП - режим противовключения;
5)РТ - рекуперативное торможение;
6)ДТ - динамическое торможение.
Для каждого режима рассмотрим направление тока I , момента M на валу двигателя, потоков энергии: механической, электрической, энергии рассеивания, и уравнение энергетического баланса.
1. Режим ХХ.
0 ,
E U ,
I U E 0,
R
M IkФ 0,
P EI M 0
Рис.28 Режим холостого хода
В этом режиме потоки энергии отсутствуют, т.к. механическая и электрическая энергии равны нулю. Из сети двигатель энергии не потребляет электроэнергии PЭЛ IU 0, т.к. I 0, механическая мощность PМЕХ M 0 0, т.к. M 0.
2. Двигательный режим. Если увеличить нагрузку, то следует увеличение момента на валу двигателя, что приводит к уменьшению скорости вращения вала. Механическая характеристика из точки ХХ переместится в 1-ый квадрант.
0 ,
E U ,
I U E .
R
28

Рис. 29 Двигательный режим
Направление скорости вращения и электромагнитного момента будут совпадать, и поток энергии будет направлен от двигателя к механизму. Ток в цепи якоря будет противоположным ЭДС, и будет совпадать с направлением напряжения U . Следовательно, электрическая энергия PЭЛ UI 0 будет направлена от источника питания к двигателю. При этом, в цепи
якоря часть электрической энергии будет рассеиваться в виде тепла P RI2. Уравнение энергетического баланса: UI EI RI2 .
3. Режим короткого замыкания. Если продолжать увеличивать момент M на валу двигателя, то скорость будет снижаться, и при значении момента, равном критическому M MK , она станет равным нулю: 0.
При M MK , 0.
IКЗ I U 0 U , т.к. E kФ . R R
Рис.30 Режим короткого замыкания
Необходимо отметить, что этот режим при некоторых условиях, а именно при достаточно больших значениях U и малых значениях R цепи якоря может оказаться неприемлимым для двигателя:
PМЕХ Mk0 0;
PЭЛ UIКЗ RIКЗ2 .
Потребляемая двигателем из сети энергия вся рассеивается в виде тепла в двигателе. Направление электрической мощности: от источника питания к двигателю.
Уравнение энергетического баланса:
UIКЗ RIКЗ2 .
4. Режим противовключения
Нетрудно убедиться, что режим КЗ является энергетически не эффективным. Энергетически ещё более не эффективным является режим, который мы получаем при ещё большем увеличении нагрузки на валу двигателя.
29
Если продолжать увеличивать момент М на валу M MK , то вал начнёт вращаться в обратном направлении, т.е. двигатель реверсируется. При этом ЭДС становится отрицательным E kФ 0, и токI в цепи якоря:
I U ( E) U E IКЗ .
R R
Рис. 31 Режим противовключения
Механическая мощность PМЕХ M , где M MK , 0 PМЕХ 0, т.е. направлена от механизма к двигателю.
Электрическая мощность PЭЛ UI 0 направлена от питающей сети к двигателю.
Уравнение баланса мощностей: UI EI RI2
RI2 UI EI , т.е. в режиме противовключения и электрическая мощность, потребляемая двигателем из сети и механическая мощность, направленная от механизма к двигателю, рассеивается в виде тепла в двигателе.
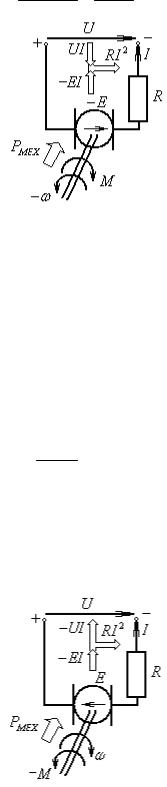
5. Рекуперативный режим характеризуется тем, что при изменении направления момента, действующего на двигатель, скорость становится 0 . ЭДС знака не меняет:
E kФ U. Тогда ток в цепи якоря: I U E 0 изменит своё направление, т.е. будет от-
R
рицательным. Отрицательным становится и электрическая мощность: PЭЛ U( I) 0. Кинети-
ческая энергия EКИН преобразуется в электрическую, которая направлена к источнику питания:
PМЕХ M 0.
Небольшая часть энергии рассеивается в виде тепла в двигателе, т.о. уравнение энерге-
тического баланса: IU EI RI2 .
Рис. 32 Рекуперативный режим
Т.о. рекуперативный режим отличается тем, что он является генераторным со стороны механизма (механическая энергия направлена от механизма к двигателю), так и со стороны питающей сети (электрическая энергия направлена от двигателя к сети), следовательно, наиболее энергетически эффективен - экономичен.
30