

17. D-схемы.



D-схемы применяются для моделирования систем, характеристики к-рых меняются с течением времени под воздействием непрерывных потоков входной информации и воздействия окружающей среды. Такие системы должны исключать случайные процессы.
Класс систем-оригиналов: системы автоматического управления.
Задача: поддержание F без участие человека.
Принцип управления:
- принцип разомкнутого управления
- принцип компенсации
- принцип обратной связи
Принцип разомкнутого управления

«+»: простота, системность
«-»: для оптимизации системы необходимо построить новую схему, к-рая подвергается анализу выходных хар-тик. Система самостоятельно не может адаптироваться к возможным изменениям значений характеристик.
Принцип компенсации

«+»:
- возможность адаптации к изменяющимся внеш условиями
- высокая скорость реагирования на изменение внеш условий
«-»: невозможно отслеживать всех возможных внеш воздействий.
Принцип обратной связи

«+»: возможность учета всех видов воздействия внеш среды
«-»: снижение времени реакции на изменение воздействия внеш среды по сравнению с предыдущими схемами.
На практике использует комбинированный подход, при к-ром все внеш воздействия разделяются на 2 группы:
- воздействия, к-рые требуют быстрой реакции САУ
- все остальные воздействия; при обработке изменения параметров событий первой группы используется принцип компенсации, для отслеживания изменений второй группы используется принцип обратной связи.

Идеальная система: h'(t)=0

Динамический процесс в САУ:
F(y, y', y'',…,y(n), h, h', h'',…,h(m), v, v', v'',…,v(k))=0
18. F-схемы.
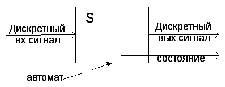
С помощью F-схем целесообразно моделировать системы с четным кол-вом состояний и дискретным характером вход сигнала.
Формализация: F=<z, x, y, ,,z0>
z – множество внутр состояний
х – мн-во входных состояний
у – мн-во выходных сигналов
- функция переходов
- функция выходов
z0 – начальное состояние

F-схема:
- по зависимости от вх сигнала:
*Автомат Мили
*Автомат Мура
- по наличию памяти
* с памятью
* без памяти
- по кол-ву вх сиганлов и состояний:
*конечный автомат
- по хар-ру отсчета дискретного времени:
*синхронный
*асинхронный
Применение:

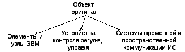
19. Р-схемы.
Вероятностный автомат (ВА) - это дискретный потактный преобразователь информации с памятью, функционирование которого в каждом такте зависит только от состояния памяти в нем и может быть описано статистически.
Схемы вероятностных автоматов (Р-схем) применяются:
в проектировании дискретных систем, проявляющих статистически закономерное случайное поведение;
в определении алгоритмических возможностей систем;
в обосновании границ целесообразности их использования;
в решении задач синтеза по выбранному критерию дискретных стохастических систем, удовлетворяющих заданным ограничениям.
Математическое понятие Р-автомата формируется на понятиях, введенных для F-автомата.
Формализация:

bkj – вероятности перехода автомата в состояние zk и появление на выходе сигнала yj, если он находился в состоянии zi и на его вход в этот момент времени поступил сигнал xl.
Применение:
