

918
.pdfляется медленность написания кода. Так же стоит отметить, что Rust является достаточно молодым языком программирования (версия 1.0 вышла в мае 2015 г.) и не обладает таким же обширным набором библиотек для сетевого программирования как Java С# или Python.Таким образом, можно составить сравнительную таблицу, отразив в ней такие критерии как скорость работы языка программирования, надежность кода, простота написания приложения.
Подводя итог стоит отметить, что наиболее удачным вариантом выбора языка программирования для написания торгового робота можно считать Java, так как у него есть необходимые библиотеки для конструирования оптимизатора портфолио. Он достаточно производительный для удовлетворения требований, предъявляемых к торговому движку. Вместе с тем, язык Rust так же является удачным выбором. И в будущем с ростом числа библиотек и открытого кода на Rust, он станет более предпочтительным.
Литература
1.Abdulaziz Djalilov, Numan Ülkü. Individual investors’ trading behavior in Moscow Exchange and the COVID-19 crisis / J Behav Exp Finance, July 15, 2021. – URL: https://www.ncbi.nlm.nih.gov/pmc/articles/PMC8444951 (дата обращения 29.11.2022).
2.Rui Pereira, Marco Couto Energy. Efficiency across Programming Languages How Does Energy, Time, and Memory Relate? / SLE’17, October 23–24, 2017, Vancouver, BC, Canada. – URL: https://greenlab.di.uminho.pt/wp-content/uploads/2017/09/paperSLE.pdf (дата обращения 29.11.2022).
3.Кларенс Х., Шефер К., Козмина Ю., Харроп Р. Spring 5 для профессионалове / Х. Кларенс. — СПб. : Пер. с англ. : ООО «Диалектика», 2019. — 1120 с. : — ISBN 978-5-907114-07-4. — Текст : электронный // Лань : электронно-библиотечная система. — URL: https://e.lanbook.com/book/122311 (дата обращения: 29.11.2022). — Режим доступа: для авториз.
пользователей.
4.Пономарчук, Ю. В. Программирование на языке Java : учебное пособие / Ю. В. Пономарчук, И. В. Кузнецов. — Хабаровск : ДВГУПС, 2021. — 103 с. — Текст : электронный // Лань : электронно-библиотечная система. — URL: https://e.lanbook.com/book/259451 (дата обращения:
29.11.2022). — Режим доступа: для авториз. пользователей.
5.Синицын, И. В. Встраиваемые системы управления базами данными для мобильных приложений : учебное пособие / И. В. Синицын, Ю. А. Воронцов, Е. К. Михайлова. — Москва : РТУ МИРЭА, 2022. — 529 с. — Текст : электронный // Лань : электронно-библиотечная система.
—URL: https://e.lanbook.com/book/265727 (дата обращения: 29.11.2022). — Режим доступа: для авториз. пользователей.
6.Старолетов, С. М. Основы тестирования и верификации программного обеспечения : учебное пособие / С. М. Старолетов. — 2-е изд., стер. — Санкт-Петербург : Лань, 2020. — 344 с.
—ISBN 978-5-8114-5239-2. — Текст : электронный // Лань : электронно-библиотечная система. — URL: https://e.lanbook.com/book/138181 (дата обращения: 29.11.2022). — Режим доступа: для авто-
риз. пользователей.
7.Строганкова, Н. В. Шаблоны программных платформ языка Java : учебное пособие / Н. В. Строганкова, К. В. Касьяненко, А. В. Хозяинов ; составители практикума входят: использование. — Москва : РТУ МИРЭА, 2021. — 83 с. — Текст : электронный // Лань : электронно-
библиотечная система. — URL: https://e.lanbook.com/book/182466 (дата обращения: 29.11.2022). —
Режим доступа: для авториз. пользователей.
231
УДК 631.171
К.А. Бычкова – студентка, О.А. Зорин – научный руководитель, доцент кафедры информационных систем
и телекоммуникаций, ФГБОУ ВО Пермский ГАТУ, г. Пермь, Россия
МОДЕЛЬ МИНИ ФЕРМЫ: ПОЛИГОН ДЛЯ ПРОФОРИЕНТАЦИОННОЙ РАБОТЫ
Аннотация. В данной статье приводится описание разработки полигона для профориентационной работы и для использования в проведении занятий по дисциплине «Основы робототехники».
Ключевые слова. Сельскохозяйственный робот, ферма, откормочная площадка, макет, полигон, minecraft.
Сельскохозяйственная отрасль является перспективным рынком для внедрения разработок в области робототехники, поскольку использование подобных машин позволяет создавать высокоинтеллектуальное производство. В связи с этим в последние годы в агросекторе активизировалась работа по конструированию робототехнических устройств.
В основном такая техника предназначена для выполнения повторяющихся операций при возделывании различных сельскохозяйственных растений. При этом главная цель ее применения в аграрной отрасли состоит в замене человеческого труда, минимизации вредного воздействия химических средств на людей и окружающую среду, а также в повышении производительности предприятий и урожайности возделываемых культур[1].
Появляются различные виды роботов с манипуляторами, которые вытесняют человеческий труд.
Сельскохозяйственный робот – это автоматическое устройство, предназначенное для самостоятельного осуществления производственных и других операций в сельском хозяйстве, которое действует по заранее заложенной программе, формирует и использует информацию о производственном процессе и внешней среде от системы датчиков.
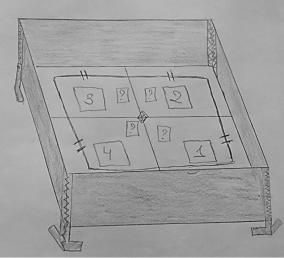
Рисунок 1. Наброски предполагаемого внешнего вида
232
В макете планируется задействовать всего два раздела: растениеводство и животноводство.
Ферма может работать по системе монокультуры или с различными зерновыми или пахотными культурами, которые могут быть отделены от разведения домашнего скота или сочетаться с ним [2].
Рисунок 2. Наброски предполагаемого внешнего вида
Разработка внешнего вида
На данном этапе разработки размеры не уточнены. Так как размеры полигона в целом и платформ в частности будут отталкиваться от моделей роботов, их поворотных моментов и конструктивных особенностей, было принято решение заняться дизайном и оформлением.
Minecraft несомненно является простым в обращении, не ограничен рамками и не требователен к железу, было решено взять его как программу для создания 3D модели полигона.
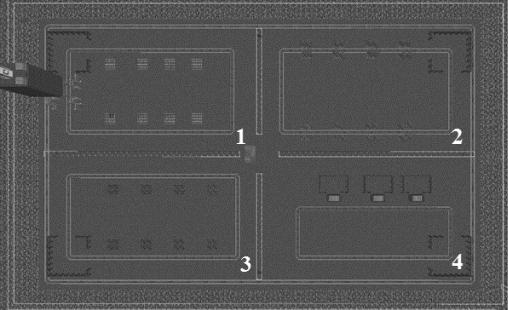
Для начала было разработано 3 вида грядок.
с кустом, распределенным по обе стороны от маршрута робота;
с кустом сбоку от маршрута робота;
с кустом, расположенном между колесами робота.
Виды грядок изображены на рисунке 3.
Рисунок 3. Виды грядок
233
После анализа предметной области было принято решение о размещении на полигоне следующих платформ:
полив растений;
уборка сорняков;
сбор урожая клубники;
кормление животных.
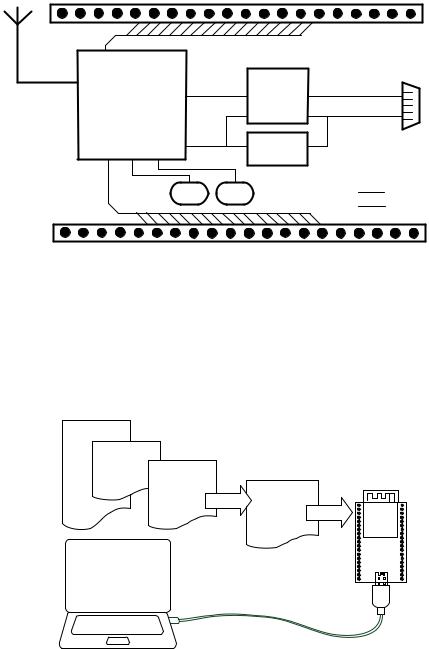
Вид сверху готовой 3D модели полигона представлен на рисунке 4.
Рисунок 4. Вид сверху готовой 3D модели полигона
Полив растений
Робот должен автоматически поливать растение, если почва слишком сухая, и прекратить полив, если почва влажная.
Так же дополнительно на платформу поставлена водонапорная башня. Робот, проезжая под водонапорной башней, останавливается, срабатывает механизм, в робота сбрасывается вода, он едет выполнять свою миссию.
Сама платформа изображена на рисунке 4, сектор 1.
Уборка сорняков
С сорняками фермеры борются по–разному. Обычно это обработка полей гербицидами или чередование сельскохозяйственных культур на одном и том же поле. Так как на данной ферме присутствует отрасль животноводства, а точнее откормочная площадка, сорняк пойдет сразу на корм скоту.
Для прокладывания пути роботу был взят один из предложенных видов грядок – с кустом, распределенным по обе стороны от маршрута робота. Платформа изображена на рисунке 4, сектор 2.
Сбор урожая клубники
Каждый имеющийся в саду сорт клубники следует собирать вовремя. И недозрелые, и перезрелые плоды портят общую картину радостной поры – сбора урожая.
234
Ягоды клубники следует собирать регулярно. Как минимум через день, а в жаркую погоду приходится этим заниматься иной раз и ежедневно. Клубника плодоносит недолго, и в это время оставлять ее без внимания категорически нельзя.
Внешний вид платформы сбора урожая клубники представлен на рисунке 4, сектор 3.
Для прокладывания пути роботу был взят один из предложенных ранее видов грядок, а именно с кустом сбоку от маршрута робота.
Далее представлена платформа кормление животных. Рисунок 4, платформа 4.
Откормочная площадка или откормочный двор – это тип операции по кормлению животных, который используется в интенсивном животноводстве.
Основной принцип откормочной площадки заключается в том, чтобы как можно быстрее увеличить количество жира, получаемого каждым животным; если животных содержать в замкнутых помещениях, а не разрешать им свободно бродить по пастбищам, они будут набирать вес быстрее и эффективнее с дополнительным преимуществом эффекта масштаба[3].
Коровы, стоящие в загонах то и дело просят еды. Робот так же должен отслеживать опустевшие кормушки, вовремя реагировать и досыпать туда корма.
В итоге производственной технологической практики был создан фундамент для написания выпускной квалификационной работы.
К ВКР с помощью наработок, сделанных за время прохождения практик, остается только собрать физическую модель полигона.
Данный полигон будет полезен в качестве наглядного пособия для агитации поступающих поступить на направления подготовки сельскохозяйственной направленности, в том числе на факультет экономики и информационных технологий. Так же его можно использовать для проведения занятий по дисциплине «Основы робототехники».
С учётом того, что платформы планируются независимыми друг от друга, можно будет презентовать одну или несколько платформ в зависимости от тематики мероприятия.
Литература
1.Роботы для полей // Журнал Агробизнес URL: https://agbztech.ru/ (дата обращения:
12.10.2022).
2.Фермерские хозяйства // фермер.ру URL: https://fermer.ru/content/ fermerskie- hozyaystva-korni-travy-v-agrobiznese-ssha-236265 (дата обращения: 10.08.2022).
3.Содержание животных на откормочных комплексах и площадках // ActiveStudy URL: https://www.activestudy.info/soderzhanie-zhivotnyx-na-otkormochnyx-kompleksax-i-ploshhadkax/ (дата обращения: 26.09.2022).
235
УДК 004.4’2
М.П. Вавилов – обучающийся, И.С. Шевчук – старший преподаватель,
ФГБОУ ВО Пермский ГАТУ, г. Пермь, Россия
ИСПОЛЬЗОВАНИЕ ТРЕКЕРОВ В ПРОЦЕССЕ РАЗРАБОТКИ ПРОГРАММНОГО ОБЕСПЕЧЕНИЯ
Аннотация. Статья посвящена анализу тайм-трекеров. Рассмотрены их назначение и решаемые задачи. Проведен сравнительный анализ приложений для тайм-менеджмента. Выявлены их положительные и отрицательные аспекты. Обоснована целесообразность разработки собственного сервиса для таймменеджмента для компании.
Ключевые слова: тайм-трекер, разработка, тайм-менеджмент, выполнение задач, программное обеспечение.
Время – деньги. Эту фразу многие часто слышали своей жизни. А в жизни разработчика программного продукта эта фраза является чуть ли не фундаментальной. Создание программного обеспечения (ПО) - занятие не из дешевых. Чем дольше оно длится – тем больше денег потратит заказчик, и тем выше вероятность, что само создание программного обеспечение окажется убыточным. Поэтому очень важно правильно распределять и отслеживать время, затраченное на разработку приложений.
К возможным проблемам при разработке можно отнести:
затягивание сроков по проектам;
превышение оценочного времени по проектам;
отсутствие консолидированных данных по загрузке производства;
сложный контроль за большим штатом сотрудников;
увеличение объема заказов;
распределение рабочего времени выполнения задач.
Для того, чтобы частично или полностью решать подобные проблемы, существует различное программное обеспечение: таск-трекеры и тайм-трекеры. Таск-трекеры в большей степени предназначены для управления проектами и решения сопутствующих задач. Тайм-трекеры же больше предназначены для менеджмента времени разработки.
Тайм-трекер (англ. time-tracker или time-tracking software) – это программ-
ное обеспечение, которое позволяет сотрудникам, работающим за компьютерами, отслеживать время, потраченное на выполнение задач или проектов, а работодателю или менеджеру проектов контролировать время на разработку.
Использование подобного ПО стало особенно популярным в последнее время, когда появилась возможность работать удаленно. К тому же, подобное ПО является основным решением проблемы тайм-менеджмента.
Как и у любого программного обеспечения, у тайм-трекеров есть ряд основных и дополнительных задач.
Основными задачами тайм-трекеров являются:
учет рабочего времени сотрудников;
анализ продуктивности;
сбор статистических данных по затраченному времени. Дополнительными задачами тайм-трекеров являются:
оплата труда сотрудников;
236
интеграция с другими приложениями;
кроссплатформенность;
кейлоггинг (отслеживание нажатия клавиш);
выдача отчетов в виде графиков и диаграмм.
На данный момент существуют десятки различных приложений для выполнения задач тайм-менеджмента, каждое из которых имеет как положительные, так и отрицательные стороны. Сравнительный анализ приложений представлен в таблице.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица |
|
|
|
Сравнение приложений для тайм-менеджмента |
|
|||||||||||||
№ |
Название |
|
|
Плюсы |
|
|
|
|
Минусы |
|
Особенности |
|||||
приложения |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
Кроссплатформенность и прием- |
Не |
самый |
простой |
Подходит для |
||||||||||
|
|
лемая |
ценовая |
политика |
для |
интерфейс, на со- |
больших команд |
|||||||||
1 |
Tick |
крупных команд: от $19 до $79 за |
здание новых задач |
|
||||||||||||
разное |
количество |
проектов и |
для проекта тратит- |
|
||||||||||||
|
|
|
||||||||||||||
|
|
$149 неограниченное число про- |
ся |
дополнительное |
|
|||||||||||
|
|
ектов |
|
|
|
|
|
|
время |
|
|
|
|
|
||
|
|
Кроссплатформенность, недо- |
Если приобретать на |
Больше подходит |
||||||||||||
2 |
OfficeTime |
рогая цена в $49 на бессроч- |
небольшой |
отрезок |
для оффлайна, |
|||||||||||
ный период |
|
|
|
|
времени, |
то |
цена |
синхронизация по |
||||||||
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
достаточно большая |
сети |
||||||
|
|
Автоматическое |
отслеживание, |
Иногда |
автоматиче- |
Автоматическое |
||||||||||
3 |
Timely |
функции для контроля рабочего |
ское |
отслеживание |
отслеживание |
|||||||||||
времени и отслеживания продук- |
не эффективно, |
нет |
любой активно- |
|||||||||||||
|
|
|||||||||||||||
|
|
тивности |
|
|
|
|
|
бесплатной |
|
|
сти |
|||||
|
|
Функция |
Timeline |
помогает, |
Сервис |
представлен |
Простота и удоб- |
|||||||||
4 |
Hours |
если |
пользователь |
забыл |
только |
в |
виде |
веб- |
ство |
|||||||
включить таймер для оффлайн |
приложения |
и |
при- |
|
||||||||||||
|
|
|
||||||||||||||
|
|
событий, удобный интерфейс |
ложения для iOS |
|
||||||||||||
|
|
Встроенная функция создания |
Сложный и не очень |
Подходит для |
||||||||||||
5 |
Harvest |
платежей, много интеграций со |
гибкий интерфейс |
фрилансеров и |
||||||||||||
сторонними |
инструментами, |
|
|
|
|
|
|
удаленных ко- |
||||||||
|
|
|
|
|
|
|
|
|||||||||
|
|
множество сервисов. |
|
|
|
|
|
|
|
|
манд |
|||||
|
|
Недорогая цена $48 в год, си- |
Бесплатная |
версия |
Подходит для |
|||||||||||
6 |
TMetric |
стема |
отчетов, |
интеграции |
со |
только |
для |
команд |
фрилансеров и |
|||||||
|
|
сторонними сервисами |
|
из пяти человек |
|
небольших команд |
||||||||||
|
|
Автоматизированное |
отслежи- |
Расширение |
|
для |
Подходит для |
|||||||||
|
|
вание |
времени, |
мониторинг |
|
|
Chrome |
компаний, а не |
||||||||
7 |
TimeDoctor |
сайтов, |
подробные |
отчеты, |
ограничено, в отли- |
для фрилансеров |
||||||||||
|
|
контроль |
конфиденциальности, |
чии от приложения |
|
|||||||||||
|
|
много полезных интеграций |
|
|
|
|
|
|
|
|
||||||
В целом, выбор тайм-трекера зависит от конкретного случая и специфики рабочего процесса. Каждое приложение имеет свои особенности и предназначение: одни сервисы предназначены для индивидуального работника, другие для команд. Различная ценовая политика может также повлиять на выбор. Например, если $18 за использование одной командой в месяц это не много, то за использование трекера для нескольких командам компания может платить достаточно большую сумму для вспомогательного сервиса. В одних тайм-трекерах присутствует интеграция со сторонними сервисами, в других нет. При этом вопрос наличия необходимости интеграции со сторонними сервисами для конкретной команды или конкретного предприятия также остается.
Поэтому некоторые компании принимают решение по разработке собственного сервиса для тайм-менеджмента. Создание подобного сервиса для внут-
237
реннего использования обусловлено следующими факторами:
особенности процесса разработки;
отсутствие необходимости в использовании интеграций;
отсутствие желания или возможности приобретать платную версию подобных сервисов, а бесплатная версия сильно ограничена в функционале;
функционал собственного решения можно сделать максимально гибким для конкретной компании, учитывая всевозможные требования к сервису;
практически полная конфиденциальность;
использование сервиса в коммерческих целях.
Как можно заметить, разработка собственного тайм-трекера для компании имеет множество положительных сторон, а сам сервис должен гибко интегрироваться в бизнес-процессы компании.
Из отрицательных сторон разработки собственного сервиса можно выделить то, что на его создание, как и на создание любого другого проекта, необходимо выделить ресурсы для разработки. Затраты ресурсов при этом зависят от сложности структуры разрабатываемого сервиса.
В целом, разработка собственного решения является скорее выгодным вложением в удобный и настраиваемый инструмент с бесплатным использованием, чем проецирование процесса разработки с особенностями на функционал уже существующего сервиса. Поэтому, если для компании не подходят готовые приложения, то отличным решением будет создание собственного тайм-трекера.
Так или иначе, появление подобного программного обеспечения для организации и управления процессом разработки является закономерным. Причинами, которые привели к этому, являются развитие и всё более сложная структура не только самих программных продуктов, но и процесса их разработки. А приложения по типу тайм-трекера должны облегчить жизнь разработчиков, разгружая их от дополнительной нагрузки, переработок и позволяя больше времени и сил направить на непосредственное выполнение обязанностей.
Литература
1. Вотинов, М. В. Вычислительные машины, системы и компьютерные сети : учебное пособие / М. В. Вотинов. — Мурманск : МГТУ, 2018. — 156 с. — ISBN 978-5-86185-956-1. — Текст : электронный // Лань : электронно-библиотечная система. — URL: https://e.lanbook.com/book/142639 (дата обращения: 16.10.2022).
2.Петренко, Е. С. Современные инструменты тайм-менеджмента : учебное пособие / Е. С. Петренко, Л. В. Шаблатина, А. В. Варламов. — Москва : Креативная экономика, 2019. — 86 с.
—ISBN 978-5-91292-294-7. — Текст : электронный // Лань : электронно-библиотечная система. — URL: https://e.lanbook.com/book/165573 (дата обращения: 27.10.2022).
3.Быстренина И.Е. Учет и планирование рабочего времени сотрудников организации:
разработка информационных систем / Быстренина И. Е., Белоярская Т. С., Макунина И. В., Миронцева А. В., Шилова А. А. Ласточкина А. А., Антонова В. В. – Москва: Научный консультант, 2019. – 148 с. – ISBN 978-5-907196-52-0. – Текст: электронный // Лань: электронно-
библиотечная система. – URL: https://e.lanbook.com/book/165573 (дата обращения: 27.10.2022).
4.Китайцева, Е. Х. Алгоритмизация. Технология разработки программного обеспечения : учебно-методическое пособие / Е. Х. Китайцева. — Москва : МИСИ – МГСУ, 2021. — 51 с. — ISBN 978-5-7264-2905-2. — Текст : электронный // Лань : электронно-библиотечная система. — URL: https://e.lanbook.com/book/249011 (дата обращения: 27.10.2022). — Режим доступа: для авто-
риз. пользователей.
5.Садыков, А. М. Методы разработки веб-приложений : учебно-методическое пособие / А. М. Садыков. — Иваново : ИГЭУ, 2019. — 72 с. — Текст : электронный // Лань : электронно-
библиотечная система. — URL: https://e.lanbook.com/book/154584 (дата обращения: 27.10.2022). —
Режим доступа: для авториз. пользователей.
238
УДК 004.738.2
В.В. Ватлин – студент; С.С. Фазылова – научный руководитель, старший преподаватель,
ФГБОУ ВО Пермский ГАТУ, г. Пермь, Россия
WI-FI SNIFFER НА БАЗЕ МИКРОКОНТРОЛЛЕРА ESP32
Аннотация. В статье рассматривается применение микроконтроллера esp32 в качестве Wi-Fi Sniffer, который позволяет перехватывать трафик Wi-Fi устройств, фильтровать трафик по заданным параметрам и передавать на компьютер, посредством виртуального COM-порта, для его дальнейшего анализа.
Ключевые слова: Wi-Fi, Sniffer, IEEE 802.11, ESP32, ESP-IDF.
Для построения беспроводных сетей используются различные типы устройств. Основные устройства – это беспроводные клиентские устройства и точки доступа.
Под беспроводными клиентскими устройствами понимают устройства со встроенными или подключенными беспроводными сетевыми адаптерами. Такие адаптеры беспроводных клиентских устройств в терминологии стандарта IEEE 802.11 называют станциями (station).
Точка доступа (Access Point, AP) – любой объект, обладающий функциональными возможностями станции и обеспечивающий доступ к распределительной системе беспроводной сети.
Для тестирования Wi-Fi сетей, понимания поведения Wi-Fi устройств разных производителей, а также для диагностики проблем в беспроводной сети часто требуется получить дамп трафика между точкой доступа и станцией. Для перехвата Wi-Fi трафика требуется беспроводной адаптер, который может работать в «неразборчивом режиме» (promiscuous mode) - это такой адаптер, который ничего не отправляет в эфир, то есть не является ни точкой доступа, ни станцией, и перехватывает (сканирует) весь трафик в эфире. Такое устройство называют Wi-Fi
сниффером (Wi-Fi Sniffer).
В данной статье будет рассмотрена теоретическая часть перехвата трафика Wi-Fi сети с помощью микроконтроллера ESP32 от компании Espressif Systems
Основные характеристики чипа ESP32:
32-bit MCU Xtensa® single-/dual-core 32-bit LX6 microprocessor(s);
520 Кбайт SRAM;
«стандартный» набор периферии, представленный в виде UART/SPI/I2C,
SDcard, Ethernet MAC (RMII), CAN2.0;
Wi-Fi (802.11b/g/n);
Blueooth (Bluetooth v4.2 BR/EDR and BLE specifications).
данной статье будет рассмотрена реализация проекта на макетной плате ESP32-PICO-KIT. Структурная схема ESP32-PICO-KIT с основными компонентами и с их взаимосвязями представлена на рисунке 1.
239
|
|
|
Pin Header |
|
RX/TX |
USP Bridge |
DP/ND |
ESP32-PICO-D4 |
|
|
|
|
|
5V |
|
|
|
|
|
|
3.3V |
LDO |
USP Port |
|
|
||
|
|
Regulator |
|
EN |
BOOT |
|
Signal |
|
|
|
Power |
|
|
|
Pin Header |
Рисунок 1. Структурная схема ESP32-PICO-KIT
В качестве среды разработки в проекте используется ESP-IDF (Espressif IoT Development framework). ESP-IDF является официальной средой для разработки IoT приложений на основе системы на кристалле ESP32. Структурная схема среды разработки приложений для ESP32 представлена на рисунке 2.
ESP-IDF |
Cmake / IDE |
|
|
Toolchain |
|
|
Project |
Application
BUILD
UPLOAD
Рисунок 2. Структурная схема среды разработки для ESP32
ESP-IDF по существу содержит API (программные библиотеки и исходный код) для ESP32 и скрипты для работы с наборами инструментов (toolchain).
Ниже приведен пример реализация кода на API ESP-IDF.
1) Подключение отладочной платы к компьютеру по USB.
Отладочную плату ESP32-PICO-KIT можно подключить к USB через переходник UART-USB на чипе CP2102. Соответственно, нужна инициализация UART (Universal asynchronous receiver/transmitter).
uart_config_t uart_cfg = {
.baud_rate = UART_2_PC_BAUD_RATE,
.data_bits = UART_DATA_8_BITS,
.parity |
= UART_PARITY_DISABLE, |
|
240 |