

2.1.7. Линейная засечка
От пункта A с известными координатами XA, YA измерено расстояние S1 до определяемой точки P, а от пункта B с известными координатами XB, YB измерено расстояние S2 до точки P .
Графическое решение. Проведем вокруг пункта A окружность радиусом S1 (в масштабе чертежа), а вокруг пункта B - окружность радиусом S2; точка пересечения окружностей является искомой точкой; задача имеет два решения, так как две окружности пересекаются в двух точках (рис.2.9).
Исходные данные: XA, YA, XB, YB,
Измеряемые элементы: S1, S2,
Неизвестные элементы: X, Y.
Аналитическое решение. Рассмотрим два алгоритма аналитического решения, один - для ручного счета (по способу треугольника) и один - для машинного счета.
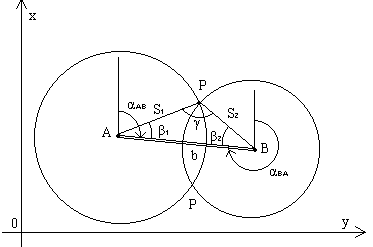
Рис.2.9
Алгоритм ручного счета состоит из следующих действий:
решение обратной геодезической задачи между пунктами A и B и получение дирекционного угла αAB и длины b линии AB,
вычисление в треугольнике ABP углов β1 и β2 по теореме косинусов:
![]() (2.29)
(2.29)
вычисление угла засечки γ
![]() (2.30)
(2.30)
вычисление дирекционных углов сторон AP и BP:
пункт P справа от линии AB
![]() (2.31)
(2.31)
пункт P слева от линии АВ
![]() (2.32)
(2.32)
решение прямых геодезических задач из пункта A на пункт P и из пункта B на пункт P:
1-е решение
![]() (2.33)
(2.33)
2-е решение
![]() (2.34)
(2.34)
Результаты обоих решений должны совпадать.
Алгоритм машинного решения линейной засечки состоит из следующих действий:
решение обратной геодезической задачи между пунктами A и B и получение дирекционного угла αAB и длины b линии AB,
введение местной системы координат X'O'Y' с началом в точке A и осью O'X', направленной вдоль линии AB, и пересчет координат пунктов A и B из системы XOY в систему X'O'Y':
![]() (2.35)
(2.35)
запись уравнений окружностей в системе X'O'Y':
![]() (2.36)
(2.36)
и совместное решение этих уравнений, которое предусматривает раскрытие скобок во втором уравнении и вычитание второго уравнения из первого:
![]() (2.37)
(2.37)
откуда
![]() (2.38)
(2.38)
и
![]() (2.39)
(2.39)
Если искомая точка находится слева от линии AB, то в формуле (2.39) берется знак "-", если справа, то "+".
пересчет координат X' и Y' точки P из системы X'O'Y' в систему XOY по формулам (2.2):
![]()
2.1.8. Обратная угловая засечка
К элементарным измерениям относится и измерение угла β на определяемой точке P между направлениями на два пункта A и B с известными координатами XA, YA и XB, YB (рис.2.10). Однако, это измерение оказывается теоретически довольно сложным, поэтому рассмотрим его отдельно.
Проведем окружность через три точки A, B и P. Из школьного курса геометрии известно, что угол с вершиной на окружности измеряется половиной дуги, на которую он опирается. Центральный угол, опирающийся на ту же дугу, измеряется всей дугой, следовательно, он будет равен 2β (рис.2.10).

Рис.2.10
Расстояние b между пунктами A и B считается известным, и из прямоугольного треугольника FCB можно найти радиус R окружности:
![]() (2.41)
(2.41)
Уравнение окружности имеет вид:
![]() (2.42)
(2.42)
где XC и YC - координаты центра окружности. Их можно вычислить, решив либо прямую угловую, либо линейную засечку с пунктов A и B на точку C. В уравнении (2.42) X и Y - координаты любой точки окружности, в том числе и точки P, но для нахождения двух координат точки P одного такого уравнения недостаточно.
Обратной угловой засечкой называют способ определения координат точки P по двум углам β1 и β2, измеренным на определяемой точке P между направлениями на три пункта с известными координатами A, B, C (рис.2.11).
Графическое решение. Приведем способ Болотова графического решения обратной угловой засечки. На листе прозрачной бумаги (кальки) нужно построить углы β1 и β2 с общей вершиной P; затем наложить кальку на чертеж и, перемещая ее, добиться, чтобы направления углов на кальке проходили через пункты A, B, C на чертеже; переколоть точку P с кальки на чертеж.
Исходные данные: XA, YA, XB, YB, XC, YC;
Измеряемые элементы: β1, β2.
Неизвестные элементы: X, Y.

Рис.2.11
Аналитическое решение. Аналитическое решение обратной угловой засечки предусматривает ее разложение на более простые задачи, например, на 2 прямых угловых засечки и одну линейную, или на 3 линейных засечки и т.д. Известно более 10-ти способов аналитического решения, но мы рассмотрим только один - через последовательное решение трех линейных засечек.
Предположим, что положение точки P известно, и проведем две окружности: одну радиусом R1 через точки A, B и P и другую радиусом R2 через точки B, C и P (рис.2.11). Радиусы этих окружностей получим по формуле (2.41):
![]() (2.43)
(2.43)
Если координаты центров окружностей - точек O1 и O2 будут известны, то координаты точки P можно определить по формулам линейной засечки: из точки O1 по расстоянию R1 и из точки O2 - по расстоянию R2.
Координаты центра O1 можно найти по формулам линейной засечки из точек A и B по расстояниям R1, причем из двух решений нужно взять то, которое соответствует величине угла β1: если β1<90o, то точка O1 находится справа от линии AB, если β1>90o, то точка O1 находится слева от линии AB.
Координаты центра O2 находятся по формулам линейной засечки из точек B и C по расстояниям R2, и одно решение из двух возможных выбирается по тому же правилу: если β2<90o, то точка O2 находится справа от линии BC, если β2>90o, то точка O2 находится слева от линии BC.
Задача не имеет решения, если все четыре точки A, B, C и P находятся на одной окружности, так как обе окружности сливаются в одну, и точек их пересечения не существует.