

Основы проектирования электронных средств Материалы к Экз ОПЭС-2014 РК-01-02 / ZashitaRES Meh Vozd
.pdfДля линейных смещений β11=β22=β33=m. Для поворотов β44=Jx, β55=Jy, β66=Jz – моменты инерции аппарата относительно осей х, у, z; β46=Jxz,
β45=Jxy, β56=Jyz - соответствующие центробежные моменты.
Рассеиваемая энергия определяется диссипативной функцией, которая имеет такое же выражение, как и кинетическая энергия:
Ф = |
1 |
6 |
& & |
, |
|
∑hik qiqk |
|||
|
2 i,k =1 |
|
|
|
где hik – обобщенные коэффициенты трения, которые определяются аналогично коэффициентам αik через соответствующие коэффициенты трения виброизоляторов.
Если целью расчета является определение собственных частот системы, то в уравнении (2.50) можно также опустить члены, учитывающие трение, которое, как было отмечено выше, мало влияет на частоту свободных колебаний.
Учитывая сказанное, подставим выражения (2.51) и (2.52) для потенциальной и кинетической энергии в уравнение (2.50) и произведем последовательно дифференцирование по каждой из шести координат. В результате получим шесть уравнений свободных колебаний системы:
|
|
β &δ& |
+ α δ + α |
|
ϕ |
2 |
+ α ϕ |
3 |
= 0, |
|
|||||||||||
|
|
11 |
1 |
|
11 |
1 |
15 |
|
|
16 |
|
|
|
||||||||
|
|
β &δ& |
2 |
+ α |
22 |
δ |
2 |
+ α |
24 |
ϕ + α |
26 |
ϕ |
3 |
= 0, |
|
||||||
|
|
11 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|||||||
|
|
β &δ& |
+ α δ |
3 |
+ α |
34 |
ϕ + α ϕ |
2 |
= 0, |
(2.53) |
|||||||||||
β44ϕ1 |
+β45ϕ2 |
11 |
3 |
|
33 |
|
|
|
|
1 |
35 |
|
|
|
|||||||
+β46ϕ3 + α24δ2 + α34δ3 + α44ϕ1 + α45ϕ2 + α46ϕ3 = 0, |
|
||||||||||||||||||||
&& |
&& |
&& |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
β45ϕ1 |
+β55ϕ2 |
+β56ϕ3 + α15δ1 + α35δ3 + α45ϕ1 + α55ϕ2 + α56ϕ3 = 0, |
|
||||||||||||||||||
&& |
&& |
&& |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
β46ϕ1 |
+β56ϕ2 |
+β66ϕ3 + α16δ1 + α26δ2 + α46ϕ1 + α56ϕ2 + α66ϕ3 = 0. |
|
||||||||||||||||||
&& |
&& |
&& |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Частные решения системы уравнений (2.53) можно принять в виде |
|||||||||||||||||||||
|
δ1=A1sin(ωt + α) , |
|
|
|
φ1=A4sin(ωt + α) , |
|
|||||||||||||||
|
δ2=A2sin(ωt + α) , |
|
|
|
φ2=A5sin(ωt + α) , |
(2.54) |
|||||||||||||||
|
δ3=A3sin(ωt + α) , |
|
|
|
|
φ3=A6sin(ωt + α) . |
|
||||||||||||||
Подставив эти решения в (2.53), получим систему однородных алгебраических уравнений, определитель которой
51

|
α11 −β11ω2 |
0 |
|
0 |
|
0 |
|
α15 |
|
α16 |
|
|
0 |
α22 −β11ω2 |
0 |
|
α24 |
|
0 |
|
α26 |
|
|
∆= |
0 |
0 |
α33 −β11ω2 |
|
α34 |
α35 |
|
0 |
(2.55) |
||
0 |
α |
|
α |
α |
−β ω2 |
α |
−β ω2 |
α |
−β ω2 |
||
|
|
||||||||||
|
|
24 |
|
34 |
44 |
44 |
45 |
45 |
46 |
46 |
|
|
α13 |
0 |
|
α35 |
α45 −β45ω2 |
α55 |
−β55ω2 α56 −β56ω2 |
|
|||
|
α16 |
α26 |
|
0 |
α46 −β46ω2 |
α56 −β56ω2 α66 −β66ω2 |
|
||||
Развернув этот определитель и приравняв его к нулю, получим частотное уравнение шестой степени относительно ω2:
Aω12 +Bω10 +Cω8 +Dω6 +Eω4 +Fω2 +G =0 , |
(2.55) |
где A, B, …, G - постоянные коэффициенты, которые могут быть найдены после развертывания определителя и сведения подобных членов. Их аналитические выражения имеют довольно громоздкий вид. Поэтому целесообразно находить собственные частоты как собственные значения матрицы (2.55). Численное значение определителя
∆n =
можно найти по правилу
a11 |
a12 |
. . . |
a1n |
a21 |
a22 |
. . . |
a2n |
. . . . . . . . . . |
|||
an1 an2 |
. . . ann |
||
∆ |
n |
= a |
|
a(1) |
... a (n |
−1) |
где |
11 |
22 |
nn |
, |
||
|
|
|
|
|
|
|
aii(k ) = aii − aik aki |
akk |
( i=1,2,…, n; k=n-1) , |
||||
например
a55(4) = a55 − a54 a45  a44 .
a44 .
Алгоритм определения собственных частот состоит в следующем. Задаваясь некоторым значением частоты ω (заведомо меньшим низшей собственной частоты блока), вычисляем значение определителя ∆1. Затем,
52

увеличивая последовательно частоту на 5-10% (или на другую величину в зависимости от требуемой точности), вычисляем значения ∆2, ∆3 и т. д., проверяя все время выполнение условия ∆m - ∆m+1>0. Прекращение выполнения этого условия свидетельствует о том, что значение определителя перешло через нуль. Следовательно, истинное значение собственной частоты лежит между двумя последними принятыми в расчет значениями.
Аналогично можно найти остальные собственные частоты.
Вынужденные колебания. Для аппарата на виброизоляторах с внутренним демпфированием для каждой из обобщенных координат получим следующую систему уравнений:
β11&δ& + (1 + jη)(α11δ1 + α15 ϕ2 + α16 ϕ3 ) = P1 (t) ;
β11&δ&2 + (1 + jη)(α22δ2 + α24 ϕ1 + α26 ϕ3 ) = P2 (t) ; β11&δ&3 + (1 + jη)(α33δ3 + α34 ϕ1 + α35ϕ2 ) = P3 (t) ;
β44 |
ϕ1 |
+ β45 |
ϕ2 |
+ β46 ϕ3 + (1 + |
jη)(α24 δ2 + α34 δ3 + |
|
&& |
|
&& |
&& |
|
β45 |
ϕ1 |
+ α44 ϕ1 + α45ϕ2 + α46 ϕ3 ) = M1 (t) ; |
|||
+ β55 |
ϕ2 |
+ β56 ϕ3 + (1 + |
jγη)(α15 δ1 + α35 δ3 + (2.56) |
||
|
&& |
|
&& |
&& |
|
β46 |
ϕ1 |
+ α45 ϕ1 + α55 ϕ2 + α56 ϕ3 ) = M 2 (t) ; |
|||
+ β56 |
ϕ2 |
+ β66 ϕ3 + (1 + |
jη)(α16 δ1 + α26 δ2 + |
||
|
&& |
|
&& |
&& |
|
+ α46 ϕ1 + α56 ϕ2 + α66 ϕ3 ) = M 3 (t) .
Если обобщенные возмущающие нагрузки являются гармоническими функциями времени, то целесообразно применить комплексную форму их записи:
|
P (t ) = |
|
|
e jωt |
; |
|
|
|
|
M |
|
(t) = |
|
|
e jωt |
|
|
|||||||||||
|
P |
|
i |
M |
0i |
|
|
|||||||||||||||||||||
|
i |
|
0 i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
и искать частотные решения в виде |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
δ = |
|
|
|
|
e jωt |
, |
|
δ |
|
|
= |
|
|
|
|
e jωt |
|
, δ |
|
= |
|
|
|
e jωt |
, |
|||
A |
|
2 |
A |
|
3 |
A |
||||||||||||||||||||||
1 |
|
|
1В |
|
|
|
|
|
|
2В |
|
|
|
|
|
|
|
3В |
|
|
||||||||
ϕ = |
|
e jωt |
, |
|
ϕ |
|
= |
|
e jωt , |
ϕ3 = |
A6e jωt , |
|
||||||||||||||||
A |
|
2 |
A |
|
||||||||||||||||||||||||
1 |
4 |
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
где P0i ,M0i – комплексные амплитуды возмущающих сил и моментов; AiB – комплексная амплитуда смещения по i-й координате; ω – частота возбуждения.
53
Подставляя эти решения в (2.56), получим систему из шести алгебраических уравнений, из которых можно найти амплитуды AiB в функции частоты ω. Решение этой задачи в общем виде весьма трудоемко, однако при рациональном размещении виброизоляторов и расположении аппарата относительно действующих нагрузок задача может быть существенно упрощена.
Контрольные вопросы
1.Как определяется СЧК системы с одной степенью свободы (ОСС)?
2.Выведите формулу коэффициента динамического усиления колебаний для системы с ОСС.
3.Выведите формулу для коэффициента передачи (КП) системы с ОСС.
4.Нарисуйте график зависимости КП от частоты и объясните основные способы защиты изделий от вибраций.
5.Приведите векторную диаграмму сил, действующих на систему с ОСС.
6.Дайте анализ системы с ОСС при случайном вибрационном воздействии.
7.Почему применяется операторный метод при анализе системы с ОСС на ударное воздействие?
8.Как определяются СЧК системы с двумя степенями свободы?
9.Что понимается под собственной формой колебаний, парциальной частотой?
10.Дайте анализ вынужденных колебаний системы с ОСС.
11.Что понимается под динамическим гасителем колебаний? Принцип работы и недостатки ДГК.
12.Напишите Уравнения Лагранжа для свободных колебаний системы с шестью степенями свободы.
13.Как определяется СЧК систем с шестью степенями свободы?
14.Как составляются уравнения вынужденных колебаний для систем с шестью степенями свободы?
54

Г л а в а 3
Анализ ЭС, приводимых к системам с распределенными параметрами
3.1. СВОБОДНЫЕ ИЗГИБНЫЕ КОЛЕБАНИЯ КОНСТРУКЦИЙ ТИПА БАЛОК
Расчет собственных частот колебаний. Жесткость балки на изгиб обычно бывает значительно ниже жесткости на растяжение и кручение, поэтому расчет изгибных колебаний балок представляет для практики наибольший интерес. При расчете обычно предполагают, что упругая ось балки совпадает с линией центров масс поперечных сечений и при колебаниях
все точки балки смещают- |
|
|
|
|
|
|
|
|
|
|
|||||
ся |
перпендикулярно |
|
пер- |
|
|
|
|
z |
|
|
|
q |
n=1 |
||
воначальному |
(прямоли- |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
||||||
нейному) |
направлению |
|
|
|
|
|
|
|
|
|
n=2 |
||||
оси. Все поперечные сече- |
|
|
|
|
|
|
|
|
|
x |
|||||
|
|
|
|
|
|
|
|
|
n=3 |
||||||
ния |
при |
этом |
остаются |
|
|
|
|
|
x |
|
z(x, t) |
||||
плоскими. |
|
|
|
|
|
|
|
|
|
dx |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
В расчете |
учитыва- |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
a) |
|
|
б) |
|||||
ются только силы инерции, |
|
|
|
|
|
|
|
|
|||||||
действующие в |
направле- |
|
|
|
|
|
Рис. 3.1. Изгибные колебания балки: |
||||||||
нии оси z, и силы упру- |
|
|
|
|
а – схема нагружения; б – формы колебаний |
||||||||||
гости, препятствующие де- |
|
|
|
|
|
|
|
|
движения балки |
||||||
формации |
изгиба балки. |
В |
этом случае |
уравнение |
|||||||||||
(рис. 3.1) имеет вид |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
∂2 |
EJ |
y |
∂2 z |
+ m |
∂2 z |
= 0 . |
(3.1) |
|||||
|
|
|
∂x |
2 |
|
∂x |
2 |
|
0 |
∂t |
2 |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||||
Здесь J y – момент инерции сечения относительно оси, перпендикулярной плоскости изгиба; EJ y – жесткость балки при изгибе, характеризующая
его способность сопротивляться искривлению оси, m0 – масса единицы длины балки.
Уравнение (3.1) выражает равенство действующих на элемент балки равномерно распределенных нагрузок от сил инерции и упругости. Для его
решения представим функцию z(x,t) в виде |
|
z(x,t) = wi (x)cos(ω0it + ϕ), |
(3.2) |
55
где wi (x) – амплитудная функция, характеризующая отклонение точек балки от положения равновесия на i-й резонансной частоте.
Функция wi (x) называется собственной формой колебаний балки и зависит от граничных условий и номера собственной формы. Номер собственной формы n определяется по числу nуз внутренних узловых точек:
n = nуз +1 (точки крепления балки не учитываются). Подстановка (3.2) в (3.1) дает
d |
2 |
|
2 |
|
|
|
|
|
|
|
EJ y |
d |
w2 |
|
−ω02im0w = 0 . |
(3.3) |
|
dx |
2 |
|
||||||
|
|
dx |
|
|
|
|||
В общем случае m0,F,Jу могут быть переменными по длине балки, и тогда (3.3) не имеет точного решения. Поэтому для анализа основных зависимостей рассмотрим случай, когда эти значения постоянны. Уравнение (3.3) примет вид (символ аргумента у функции w опущен)
EJ |
|
d 4w |
2 |
|
m w = 0 |
||
y dx4 |
− ω |
||||||
или |
|
0i |
|
0 |
|||
|
|
|
|
|
|
|
|
wIV − ki4w = 0 , |
(3.4) |
||||||
где |
|
|
|
ρF |
|
|
|
4 |
2 |
|
|
|
|||
ki |
|
= ω0i |
|
. |
(3.5) |
||
|
EJ y |
||||||
Общее решение уравнения (3.4) состоит из суммы четырех частных решений. Оно может быть представлено в виде известных функций Кры-
лова [ 3 ] или в виде |
|
wi (x) = Ai sin ki x + Bi cos ki x + Cish ki x + Dich ki x . |
(3.6) |
Таким образом, форма колебаний зависит от постоянных интегрирования Ai , Bi , Ci , Di и параметра ki , т. е. от частоты ω0i . Для определения
постоянных Ai , Bi , Ci , Di должны быть рассмотрены граничные условия,
зависящие от способа закрепления концов балки.
Наиболее часто встречаются следующие виды граничных условий:
1)на опертом конце балки (шарнирное крепление) прогиб и изгибающий момент равны нулю или w = 0;w′′ = 0;
2)на жестко закрепленном конце прогиб и угол поворота сечения равны нулю, т. е. w = 0; w′ = 0;
3)на свободном конце балки изгибающий момент и перерезывающая
56

сила равны нулю, откуда w′′ = 0;w′′′ = 0.
Известны другие виды граничных условий [2, 10].
Используя решение (3.6) и граничные условия, можно найти частные виды решений и получить для каждого из них частотное уравнение, из которого вычислить параметры k (а следовательно, и частоты ω) для любой формы колебания. В частности, для приведенного выше случая балки с
шарнирно закрепленными концами (рис. 3.1) граничные условия будут при x = 0 w = w′′ = 0;
при x = l w = w′′ = 0 .
Используя первые два граничных условия, находим: Bi = Di = 0. Два других условия приводят к следующей системе линейных однородных относительно Ai и Ci уравнений
Ai sin kil + Cish kil = 0; − Ai sin kil + Cish kil = 0.
Приравняв определитель этой системы к нулю, получим уравнение
частот sin kil sh kil = 0. Так как |
sh kil обращается в нуль только при |
|
kil = 0 (что обозначает отсутствие колебаний), |
частотное уравнение для |
|
данного способа закрепления балки будет |
|
|
sin λ = 0 |
(λ = kl) , |
(3.7) |
а его корни λn = iπ (i=1, 2, ...).
Уравнением формы колебаний для данного частного случая будет уравнение синусоиды
wi (x) = Ai siniπx / l , |
(3.8) |
амплитуда которой Ai представляет собой максимальный прогиб балки и
определяется начальными условиями.
Значение корня частотного уравнения (3.7) определяет форму колебаний (в данном случае i – число полуволн синусоидальной линии изгиба, укладывающихся на длине балки) и соответствующую собственную частоту. Эта частота находится из (3.5) подстановкой в него корней частотного уравнения (3.7):
λ2 |
EJ y |
или |
f0i = |
λ2 |
EJ y |
|
ω0i = l2 |
ρF |
2πl 2 |
ρF . |
(3.9) |
||
i |
|
|
|
i |
|
Для балки прямоугольного сечения F = bh и J y = bh3 /12 , и тогда
ω |
= |
(iπ)2 |
h |
E |
. |
(3.10) |
0i |
|
l2 |
2 3 |
ρ |
|
|
|
|
|
|
57

Таким образом, собственная частота балки прямоугольного сечения не зависит от его ширины b.
Для консольно закрепленной балки (рис. 3.2) граничные условия бу-
дут:
при x = 0 w = w′ = 0;
при x = l w′′ = w′′′ = 0.
Используя (3.6) и граничные условия, придем к частотному уравне-
нию |
|
cos λ сh λ +1 = 0 . |
(3.11) |
Из этого уравнения находим следующие значения параметра λ:
λ1 =1,875; |
λ2 = 4,694; |
λi ≈ (2i −1)π/ 2 |
(i ≥ 3) . |
(3.12) |
|||||||||
|
|
|
|
|
|
|
|
|
Подставив эти значения |
||||
|
|
|
|
|
|
|
|
|
в (3.9), можно найти любую |
||||
|
|
|
|
|
|
|
|
x |
из собственных частот кон- |
||||
|
|
|
|
|
|
|
|
||||||
|
|
|
|
n=1 |
|
|
|||||||
|
|
|
|
|
|
сольной балки. |
|
||||||
|
|
|
|
|
n=1 |
|
|
Формы колебаний бал- |
|||||
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
ки (рис. 3.2) |
могут быть оп- |
|||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
ределены |
из |
уравнения ам- |
||
|
|
|
|
nn=2 |
|
|
|
|
|||||
|
|
|
|
|
|
плитудной |
функции подста- |
||||||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
новкой в нее соответствую- |
||||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
щих |
корней |
λ |
частотного |
|
|
|
Рис. 3.2. |
Формы изгибных |
уравнения (3.11) и постоян- |
|||||||||
|
|
ной, зависящей от начальных |
|||||||||||
|
|
колебаний консольной балки |
условий. |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
Для балки, оба конца |
||||
которой жестко закреплены, граничные условия будут: |
|
|
|
||||||||||
|
|
|
|
w = w′ = 0 при x = 0 и x = l . |
|
|
|
||||||
При этих граничных условиях получим частотное уравнение в виде |
|||||||||||||
|
|
|
|
cos λ сh λ −1 = 0 , |
|
|
|
|
(3.13) |
||||
которое дает следующие значения λ: |
|
|
|
|
|
||||||||
λ1 = 4,730; |
λ2 = 7,853; |
λi ≈ (2i +1)π/ 2 |
(i ≥ 3) . |
(3.14) |
|||||||||
Подстановка этих значений в (3.9) дает собственные частоты балки, оба конца которой жестко закреплены 1).
Частотные коэффициенты для первых трех СЧК (i=1,2,3) и типичных способов крепления концов балки приведены в табл. 3.1.
1) Такие же частоты будет иметь балка с двумя свободными концами.
58
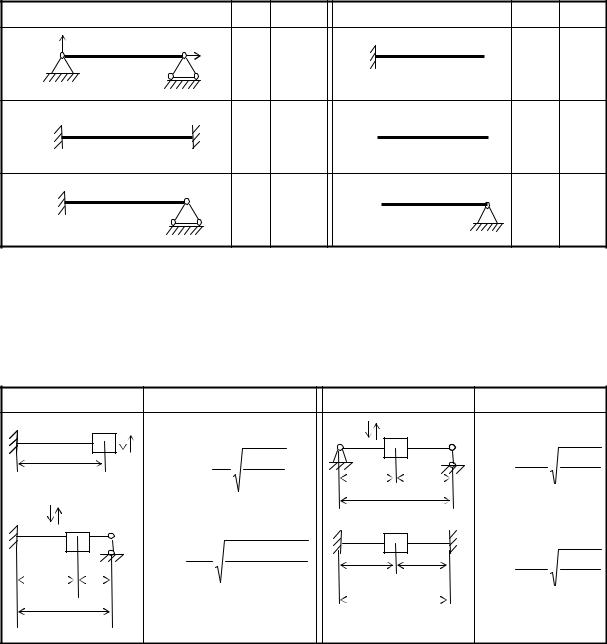
Т а б л и ц а 3.1
Частотные коэффициенты λi
Схема балки |
i |
λi |
Схема балки |
i |
λi |
z |
1 |
3.14 |
|
1 |
1.88 |
x |
2 |
6.28 |
|
2 |
4.69 |
|
3 |
9.43 |
|
3 |
7.86 |
|
1 |
4.73 |
|
1 |
0 |
|
2 |
7.85 |
|
2 |
4.73 |
|
3 |
11.00 |
|
3 |
7.85 |
|
1 |
3.93 |
|
1 |
0 |
|
2 |
7.07 |
|
2 |
3.93 |
|
3 |
10.21 |
|
3 |
7.07 |
СЧК балок с сосредоточенной массой рассчитываются по формулам, |
||||||||||
приведенным в табл. 3.2 [10]. |
|
|
|
Т а б л и ц а 3.2 |
||||||
|
|
|
|
|
|
|
||||
|
Собственные частоты колебаний балок с сосредоточенными массами |
|||||||||
Схема балки |
|
СЧК |
Схема балки |
|
|
СЧК |
||||
|
m |
|
|
|
|
m |
|
|
|
|
|
L |
f0 = |
1 |
3 EJL |
a |
b |
f0 |
= |
1 |
3 EJL |
|
|
2π |
mL3 |
|
L |
2πab |
m |
|||
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
m |
|
|
|
|
m |
|
|
|
|
|
|
L |
|
3 EJL |
a |
b |
|
|
L |
3 EJL |
a |
b |
f0 = πab |
ma( 3a + 4b ) |
f0 |
= |
|||||
|
L |
|
|
|
|
L |
|
|
2πab |
mab |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
Анализ (3.10) показывает, что балка имеет бесконечное число собственных форм колебаний и соответствующее им число собственных частот, при этом частоты всех тонов быстро возрастают. Из (3.10) видно также, что любая собственная частота балки сильно зависит от ее длины (обратно пропорционально квадрату длины) и в меньшей степени от размеров и формы поперечного сечения и свойств материала. Это дает возможность конструктору корректировать частотные характеристики разрабатываемой
59

конструкции.
Пример 3.1. Рассчитать три первые собственные частоты колебаний балки, свободно опертой на концах и имеющей следующие параметры: поперечное сечение круг-
лое с диаметром d = 0,5 10−3 м, длина L = 2,8 10−2 м. Балка (вывод ЭРЭ) выполнена из меди с характеристиками Е =1,32 1011н/м2; ρ = 8,9 103 кг/м3 (табл. П.1).
Р е ш е н и е. |
|
Для балки круглого сечения находим |
|
|
|
|
|
|||||||||||
|
|
J = |
|
πd 4 |
|
|
3,14(0,5 10−3 )4 |
|
−15 |
|
4 |
|
|
|||||
|
|
|
|
|
|
= |
|
|
|
= |
3,1 10 |
|
м |
|
; |
|
||
|
|
|
|
64 |
|
|
64 |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
m = ρ |
πd 2 |
|
= |
8,9 103 |
3,14(0,5 10−3 )2 |
|
|
|
−3 |
кг м. |
||||||||
|
4 |
|
|
|
|
|
4 |
|
|
=1,75 10 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
По формуле (3.9), взяв из табл.3.1 λ1 = 3,14; λ2 |
= 6,28 и λ3 |
= 9,33 найдем |
||||||||||||||||
f01 = ω01 |
= |
|
|
|
|
3,142 |
|
1,32 1011 3,1 10−15 |
|
= 942 Гц; |
||||||||
2π |
|
6,28(2,8 10−2 )2 |
1,75 10−3 |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
f02 = 3768 Гц; |
f03 = 8478 Гц. |
|
|
|
|
|
||||||
3.2. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ КОНСТРУКЦИЙ ТИПА БАЛОК
Определение амплитуд колебаний при гармоническом возбужде-
нии. Для определения резонансных амплитуд, деформаций и механических напряжений в элементах балочных конструкций в процессе эксплуатации необходимо рассмотреть уравнения их движения при вынужденных колебаниях. Эти уравнения будут отличаться от однородного уравнения (3.1) правой частью, в которой будут находиться внешние силы: кроме этого, в левую часть уравнений необходимо ввести диссипативную силу, которая определяет потери энергии при колебаниях. Вид уравнений вынужденных изгибных колебаний зависит от принимаемой гипотезы о диссипативной силе.
Для конструкций с демпфирующими слоями из полимерных материалов широкое распространение получила экспериментально проверенная гипотеза, согласно которой диссипативная сила принимается пропорциональной скорости деформации [3]. Уравнение вынужденных изгибных колебаний балки записывается в виде
|
∂ |
2 |
z |
|
∂ |
4 |
z |
|
∂ |
5 |
z |
|
= P(x,t), |
|
m0 |
|
|
|
+ h |
|
|
(3.15) |
|||||||
|
|
2 |
|
|
4 |
|
4 |
|
||||||
∂t |
+ EJ y |
∂x |
∂x |
|
|
|||||||||
|
|
|
|
|
|
∂t |
|
|
||||||
где P(x,t) - внешняя сила, |
возбуждающая колебания и приложенная к |
|||||||||||||
60