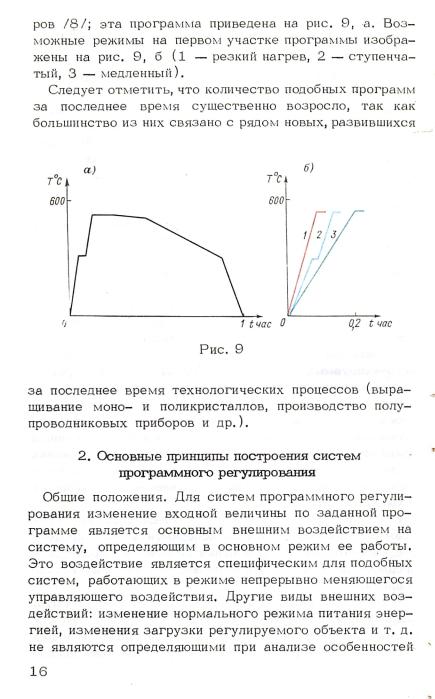
книги из ГПНТБ / Страшун А.З. Программные регуляторы технологических процессов
.pdfкоторые изображены на рис. 3 и 4 . Первая из этих программ состоит из 7 участков, причем за каждым участком следует участок иного типа. Вторая програм ма состоит из 5 участков, причем участки Ш, ГУ и У являются однотипными участками, которые отличаются друг от друга значениями скоростей изменения задава -
ТС
600
tчас |
4 Ьчас |
Р и с . 3 |
Р и с . 4 |
емой величины на участке (коэффициентов пропорцио нальности) . Таким образом, могут чередоваться не только разнотипные участки, но и однотипные участки подъема и спада с различными значениями коэффициен тов функциональной зависимости.
Во всех приведенных примерах программируемой
величиной была температура. Действительно, |
в б о л ь |
||||||||
|
шинстве |
случаев |
меняется |
по |
|||||
|
программе именно эта величи |
||||||||
|
на, однако, |
программируемыми |
|||||||
|
величинами |
могут |
быть |
также: |
|||||
|
линейное или круговое |
п е р е м е |
|||||||
|
щение, давление, расход |
м а т е |
|||||||
|
риала |
и |
т. д. На рис. |
5 |
приве |
||||
|
t час дена |
в |
качестве примера |
про |
|||||
Р и с . |
грамма |
давления |
в |
функции |
|||||
времени в процессе сульфитной |
|||||||||
|
|||||||||
варки целлюлозы / 5 / . Программы, изображенные на рис. 2 , 3 , 4 и 5, харак
теризуются зависимостью т о г о |
или иного |
т е х |
н о л о г и ч е |
ского параметра (температуры, |
давления) |
от |
времени. |
Подобные программы носят название временных. В с т р е -
1 0
чаются программы, в которых один технологический п а раметр должен меняться в функции д р у г о г о параметра. Подобные программы носят название программ по пара метру. Примером подобной программы является з а в п с и -
г
Р и с . 6
мость тока от перемещения электрода при электрошла ковом переплаве; эта зависимость приведена на рис. 6 .
На рис. 7 приведена |
еше |
|
||||
одна |
разновидность |
про |
|
|||
грамм — программа, |
и з о |
|
||||
бражаемая |
|
криволинейной |
|
|||
зависимостью. На рисунке |
|
|||||
изображена |
зависимость |
|
||||
температуры |
заготовок |
|
||||
оптического стекла в фун |
|
|||||
кции |
времени при отжиге |
t час |
||||
ускоренного |
т и п а / 6 / . Для |
|||||
Р и с . |
||||||
участков |
подобных |
про |
||||
|
||||||
грамм |
в общем случае |
з а |
|
|||
даваемая |
по |
программе величина н ( t ) связана с в е л и |
||||
чиной |
t |
(время или другой технологический параметр) |
||||
следующей |
зависимостью: |
|
||||
где |
'fk (-.) — функциональная закономерность, по |
к о т о |
рой меняется величина Н (т) на рассматриваемом |
у ч а |
|
стке |
программы. |
|
К настоящему времени получили распространение программные задающие устройства с раздельным з а д а нием программы по участкам, которые более подробно
1 1
будут рассмотрены ниже. При эксплуатации подобных приборов задание каждого участка программы должно
производиться несколькими |
цифровыми величинами, к о |
||||||
торые, будучи |
введены |
в |
прибор, должны |
полностью |
|||
характеризовать |
и определять все точки э т о г о |
участка. |
|||||
Р а с с м о т р и м |
способы |
определения |
каждого |
участка |
|||
программы |
для |
программ с прямолинейными и криво |
|||||
линейными участками. Любой из прямолинейных |
у ч а с т |
||||||
ков подъема |
или спада |
на |
основании |
выражений ( 1 ) и |
|||
( 2 ) может быть полностью определен следующим выра
жением в случае |
временной |
± |
программы: |
|
|
|
|
||||||
|
|
|
н1 1 |
+ , - н п - |
|
tnnlt„. |
|
|
|
|
(4) |
||
Аналогичное |
|
выражение |
может |
быть |
написано |
и |
для |
||||||
программы по |
параметру. |
|
|
|
|
|
|
|
|
||||
В формуле |
( 4 ) |
в„.( i |
и |
|
Н п — н а ч а л ь н о е |
значение |
|||||||
задаваемой величины соответственно на (п-\ |
1) и |
|
/£~м |
||||||||||
участках |
программы, |
a |
^tn—временная |
длительность |
|||||||||
а - г о участка |
программы. |
|
Знак |
" п л ю с " с о о т в е т с т в у е т |
|||||||||
участкам |
подъема, а |
знак |
|
" м и н у с " — участкам |
спада |
||||||||
программы. |
|
|
|
|
|
|
|
|
|
|
|
|
|
Практически |
величина Н л |
для каждого участка |
о к а з ы |
||||||||||
вается заданной, она определяется конечным |
значением |
||||||||||||
задаваемой |
величины |
на |
предыдущем |
(п.— 1) участке |
|||||||||
программы. |
Из |
остальных |
трех величин любые |
две |
|||||||||
м о г у т считаться независимыми; для задания участка программы должны быть указаны эти две величины, а также знак.
Таким образом, теоретически любой из прямолиней
ных участков программы может быть определен |
одним |
из трех указанных ниже способов: |
|
1 ) указанием временной длительности участка |
Atn и |
конечного значения задаваемой величины на рассматри
ваемом участке программы |
W „ + i |
(равное |
начальному |
||||
значению |
задаваемой величины |
на |
следующем |
участке |
|||
п р о г р а м м ы ) ; |
|
|
|
|
|
|
|
2 ) указанием временной |
длительности участка |
Afn |
|||||
и скорости |
изменения задаваемой |
величины |
на |
р а с с м а |
|||
триваемом участке программы |
/и • |
|
|
|
|||
1 2
3 ) указанием скорости изменения задаваемой |
в е л и |
||||||||
чины |
//7„ |
и ее конечного значения |
на рассматриваемом |
||||||
участке программы |
ftn-\-i. |
|
|
|
|
|
|||
Если рассматривается не программа по |
времени, а |
||||||||
программа |
по параметру, то роль временной |
д л и т е л ь н о |
|||||||
сти участка Д£л |
исполняет |
разность значений в точках, |
|||||||
соответствующих |
началу |
и |
концу |
участка, |
т о г о |
пара |
|||
метра, |
в |
функции |
от которого |
меняется |
задаваемая |
||||
величина |
Дтп . |
|
|
|
|
|
|
|
|
Сложнее |
обстоит |
д е л о |
с криволинейными |
программа |
|||||
ми, практически вне зависимости от т о г о описывается ли эта криволинейная зависимость простой аналитиче ской функциональной зависимостью или сложной, или не может быть описана таковой. Почти всегда технически оказывается много проще и удобнее производить з а д а ние программы, состоящей из прямолинейных участков, поэтому стремятся любую криволинейную программу
заменить |
последовательностью прямолинейных о т р е з |
||
ков. При |
каждой подобной |
замене должна |
учитываться |
вносимая |
ею погрешность, |
которая войдет |
в качестве |
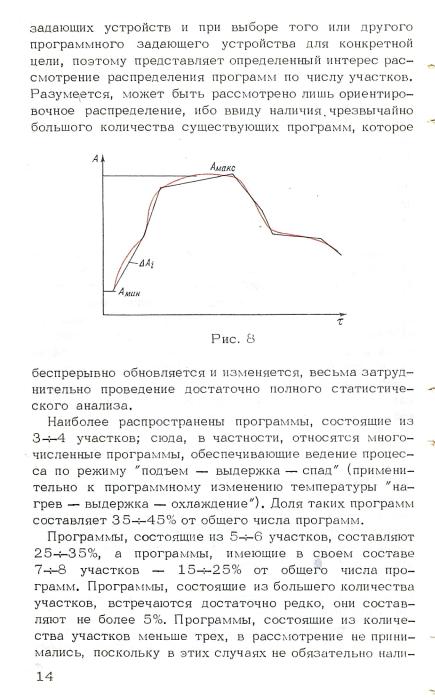
одной из составляющих в суммарную погрешность з а д а ния программируемой величины. Пример замены криво линейной программы последовательностью прямолиней
ных отрезков иллюстрируется рис. 8 . Погрешность |
т а |
|||||||||
кой замены |
может быть оценена по следующей |
формуле: |
||||||||
|
|
|
s " : i i i m i — (-) |
|
— Н |
' |
|
|
( ' |
|
|
|
|
|
"макс |
"мин |
|
|
|
|
|
где |
Дв, — разность |
между действительным |
значением |
|||||||
задаваемой |
величины |
по |
программе |
и значением |
этой |
|||||
величины в i-й |
точке |
после |
замены |
программы |
пря |
|||||
молинейными отрезками; |
6 н |
а к с , |
в м ) 1 Н — максимальное |
|||||||
и минимальное |
значения |
задаваемой величины в преде |
||||||||
лах задаваемой |
программы. |
|
|
|
|
|
||||
Погрешность замены может быть уменьшена у в е л и ч е нием количества прямолинейных отрезков, заменяющих криволинейную зависимость .
Количество участков программы является существен ным фактором при конструировании ряда программных
чие программного задающего устройства в аппаратуре, предназначенной для автоматизации процесса.
Следует отметить еще одну характеристику программ, имеющую важное значение с точки зрения выбора п р о граммного задающего устройства для автоматизации. Значительное число программ может быть отнесено к
^группе так называемых циклических или жестких, т. е. имеющих неизменный вид при многократных повторе ниях технологического процесса. Например, несколько
подобных |
программ указано в |
/ 2 — 7 / , на рис. 2 — 5 |
|
приведены примеры таких программ. |
|||
В т о |
же |
время ряд программ характеризуется о т с у т |
|
ствием |
полной повторяемости |
при последовательных |
|
многократных повторениях технологического процесса. Отсутствие повторяемости может быть обусловлено сильной зависимостью хода и качества протекания процесса от окружающих условий, степени загрузки аппарата, в котором идет процесс, качества исходных компонентов и т. д., т. е. от условий, которые по тем или иным причинам не могут быть сделаны стабильными. Подобные программы относят к группе так называемых корректируемых или гибких. При э т о м в тех случаях, когда изменение условий протекания процесса может быть учтено до е г о начала, необходимые изменения вносятся в программу перед запуском технологического процесса, в тех случаях, когда влияние изменения каких-либо факторов на ход и качество протекания процесса не может быть оценено предварительно, н е о б
ходимые изменения должны |
быть внесены в программу |
в ходе с а м о г о процесса. |
|
К этой же группе должны |
быть отнесены также про |
граммы различных научно-экспериментальных процес
сов, необходимость |
изменения |
которых от процесса к |
|
процессу вызвана задачами проведения научного |
и с с л е |
||
дования. |
|
|
|
В качестве примеров подобных программ м о г у т |
быть, |
||
например, указаны |
температурные кривые нагрева с и |
||
с т е м ы полупроводник — сплав |
при вплавлении |
индия |
|
в германий при производстве полупроводниковых |
прибо- |
||
1 5
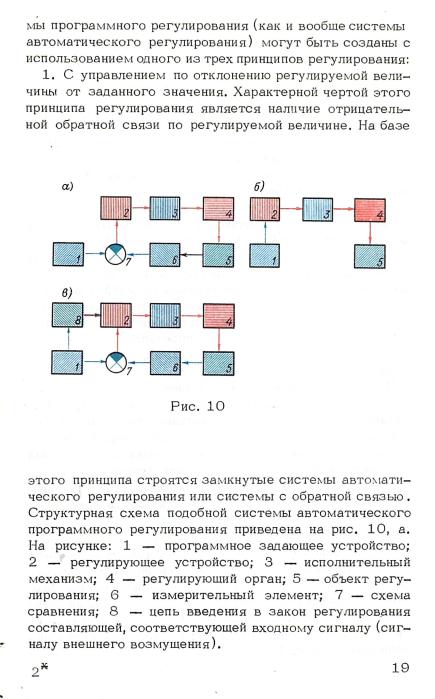
работы рассматриваемого кпасса с и с т е м а в т о м а т и ч е ского регулирования. Влияние этих воздействий на работу систем автоматического регулирования в д о с т а точной степени освещено в литературе / 9 , 1 0 / , поэтому для упрощения задачи далее целесообразно учитывать действие лишь одного вида внешнего возмущения: и з м е нение входной величины.
На участках выдержки (поддержания неизменного значения регулируемого параметра) система п р о г р а м много регулирования должна обеспечивать с т а б и л и з а цию регулируемой величины. На участках изменения величины задания (возрастания и убывания значения
регулируемого параметра) |
система должна |
обеспечить |
|||||||
с минимальными погрешностями воспроизведение |
р е г у |
||||||||
лируемой |
величиной |
закона |
изменения |
входной |
в е л и |
||||
чины. |
|
|
|
|
|
|
|
|
|
Как |
уже |
было указано, в большинстве |
случаев |
т р е б у |
|||||
е м о е |
по |
программе |
изменение регулируемой |
величины |
|||||
должно |
происходить |
по линейному закону. |
В |
с о о т в е т |
|||||
ствии с этим изменение входной величины будет иметь вид линейно меняющегося сигнала. Случаи изменения регулируемой величины по криволинейному закону о т н о сительно редки; кроме того, в большинстве случаев криволинейная зависимость с достаточной для практи ческих целей точностью может быть аппроксимирована последовательностью линейных зависимостей. Таким образом, линейное изменение входной величины должно рассматриваться в качестве основного сигнала внешнего
возмущения в системах программного |
регулирования. |
|
Следует учитывать еще |
одну разновидность и з м е н е |
|
ния входного сигнала, |
связанную |
с особенностями |
схемно-конструктивного построения выходной части программных задающих устройств и относящуюся к тем случаям, когда этот сигнал меняется не непрерывно, а дискретно. Такой случай может иметь место в случае использования шаговых двигателей с большим з н а ч е нием шага, проволочных линейных или функциональных потенциометров с малым количеством витков и других устройств в выходной части программна
6>.ti...u>>c :л т
Если величина единичного дискретного ступенчатого изменения сигнала превышает по величине зону н е ч у в ствительности регулирующего устройства и сигнал о б ратной связи в с х е м е сравнения является непрерывным или близким к непрерывному, то входное воздействие будет представлять последовательность ступенчатых (скачкообразных) изменений входного сигнала . Время между двумя последовательными скачками будет о п р е деляться скоростью изменения регулируемой величины, требуемой на данном участке программы .
В соответствии с задачей, для решения которой предназначены системы программного регулирования, наиболее важными техническими характеристиками, определяющими их качество, являются величины с т а т и ческой и динамической погрешностей воспроизведения регулируемой величины в объекте регулирования в с о о т
ветствии |
с заданной программой — 5вС 1 |
и |
' ^ Д | | Н . |
Величина |
о в с , характеризует установившиеся |
режимы |
|
работы с и с т е м программного регулирования, |
|
5 в Д 1 | Н — |
|
режимы переходных процессов в с и с т е м е . При протека нии переходных процессов существенными величинами, характеризующими качество работы системы, являются
также продолжительность переходного процесса |
/п с ,, |
и |
|||
степень |
затухания |
колебаний при |
колебательном |
п е р е |
|
ходном |
процессе |
'-. Необходимым условием успешной |
|||
работы |
системы |
программного |
регулирования, |
как |
и |
любой системы автоматического регулирования, явля ется устойчивость системы и обладание ею определен ным запасом устойчивости.
Специфическими 'техническими характеристиками с и с т е м программного регулирования являются величины предельных скоростей изменения регулируемой величи ны на участках возрастания и убывания ее значений, физически реализуемые в определенной с и с т е м е . О с н о в ным препятствием для реализации больших скоростей являются инерционные свойства отдельных звеньев систем и ограничение расхода мощности.
Три основных принципа построения с и с т е м п р о г р а м м ного регулирования и их краткие характеристики. С и с т е -
1 8