

книги из ГПНТБ / Страшун А.З. Программные регуляторы технологических процессов
.pdfНекоторые количественные данные, характеризующие приведенные выше аппроксимирующие функции в с о о т ветствии с упомянутыми критериями, приведены ниже.
Передаточная |
|
|
i - |
|
|
|
|
|||
функция |
|
|
|
о |
|
|
|
|||
|
|
|
|
|
|
С |
|
|
|
|
Значение |
ча |
|
|
|
|
|
|
|
||
стоты ы в точ |
|
|
|
|
|
|
|
|||
ке первого |
пе |
|
|
|
|
|
|
|
||
ресечения |
|
А . — |
|
|
|
|
Определя |
|||
Ф. — х с |
отри |
|
|
|
|
|||||
цательной |
|
ве |
19,7 |
1,7.3 |
2 2 |
20,4 |
ется |
из вы |
||
щественной |
по |
ражения |
||||||||
|
|
|
|
|||||||
луосью |
|
|
1 об |
|
|
|
(,)7"2 |
= |
— l g сот |
|
Значение |
|
|
|
|
|
|
|
|
||
предельного |
|
|
|
|
|
|
|
|||
коэффициента |
|
|
|
|
|
COS Ш1 |
||||
усиления |
Аус.пр 2 3 , 1 4 |
|
29,3 |
19,25 |
|
|||||
В случае использования системы аппроксимирующих
звеньев, |
состоящей |
из апериодического |
звена 1-го |
||
порядка и звена с чистым |
(транспортным) |
запаздыва |
|||
нием, значения ш |
и |
^ у с . П р |
являются |
функциями |
|
величины |
запаздывания |
^. Варьируя этой |
величиной, |
||
можно добиться совпадения по исследуемым критериям аппроксимируемой и аппроксимирующей функций.
Из остальных звеньев наилучшую точность аппрокси
мации обеспечивают звенья, амплитудно-фазовые |
х а |
|
рактеристики которых |
описываются выражениями |
( 5 9 ) |
и ( 6 0 ) ; использование |
звеньев, аналогичных этим, но |
|
описываемых выражениями более высокого порядка нерационально, так как при этом не обеспечивается существенного улучшения точности аппроксимации, но усложняется вид передаточной функции аппроксимирую щего звена.
С учетом указанных выше соотношений может быть по известным методикам произведен расчет систем автоматического программного регулирования темпера туры, в которых объект регулирования является объек том с распределенными параметрами;
5 0
Г л а в а в т о р а я
К Л А С С И Ф И К А Ц И Я П Р О Г Р А М М Н Ы Х Р Е Г У Л Я Т О Р О В
И П Р О Г Р А М М Н Ы Х ЗАДАЮЩИХ |
У С Т Р О Й С Т В |
5 . Классификация программных |
регуляторов |
Под термином программный регулятор понимается совокупность функциональных блоков, соединенных друг с другом в определенной последовательности: програм мное задающее устройство, регулирующее устройство, измерительный прибор, элемент сравнения и исполни тельное устройство, которые, однако, конструктивно,
аиногда и схемно не всегда представляют собой самостоятельные у з л ы . Большое разнообразие программ,
атакже разнообразие технико-экономических требова ний к программным регуляторам (по точности воспро изведения программы, надежности, повторяемости про граммы, стоимости эксплуатации и д р . ) , разнообразие технологических процессов, для автоматизации которы-х необходимы рассматриваемые регуляторы, а также производственных условий их эксплуатации о б у с л о в л и вают существование большого количества программных регуляторов. По ряду существенных отличительных при знаков программные регуляторы могут быть разделены на ряд групп и подгрупп. Рассмотрим основные группы,
на которые |
целесообразно провести упомянутое р а з д е |
ление (рис. |
1 8 ) . |
Наряду с временными программами имеют место программы по параметру. В соответствии с этим с у щ е ствуют программные регуляторы с программированием по времени и программные регуляторы с программиро ванием по параметру. Э т о подразделение является сугубо специфичным для программных регуляторов. Программные регуляторы с программированием по в р е мени строятся в соответствии с блок - схемой, изобра женной на рис. 1 9 , отсчет времени в этом случае производится, как правило, при помощи элемента, нахо дящегося в программном задающем устройстве (обычно синхронный или шаговый двигатель, снабженный редук -
Программные регуляторы пропорционального действии
Программные регуляторы интегрального лс'ист вин
Программные регу.шгоры пропорционально-интеграль ного действии
Программные регул |
т о р ы |
|
пропорционального |
с |
цвете |
нием прошвошоп |
действия |
|
Программные регуляторы проиорц.-ннтегрального с введением производной действия
Аналого-цифровые програм мные регуляторы
Программные регуляторы релейного действпя
Программные регуляторы релеппо-импульспого действия
Программные регуляторы п\ш\дьгного действии
Цифровые программные pcrvляторы
Программные регуляторы с программированием
по входу в измерит, устр.
Программные регуляторы программированием по выхоту намерит, ycip.
Программные регуляторы по времени
Программные регуляторы по параметру
Жесткие программные регуляторы
Гибкие программные регуляторы
Программные регуляторы непрерывного действия
Программные регуляторы дискретного действия
Одноканальные программные регуляторы
Многоканальные программные регуляторы
Программные регуляторы приборного типа
Программные регуляторы аппаратного типа
Программные регуляторы to стандартным унифициро ванным сигналом
Программные регуляторы, с программным задающим устройством, встроенным в измерительный прибор
Программные регуляторы с программным задающим устройством, встроенным в регулирующее устройство
Программные регуляторы с отдельным программным задающим устройством
Грубые программные регуляторы
Прецизионные программные регуляторы
Рис. 18.
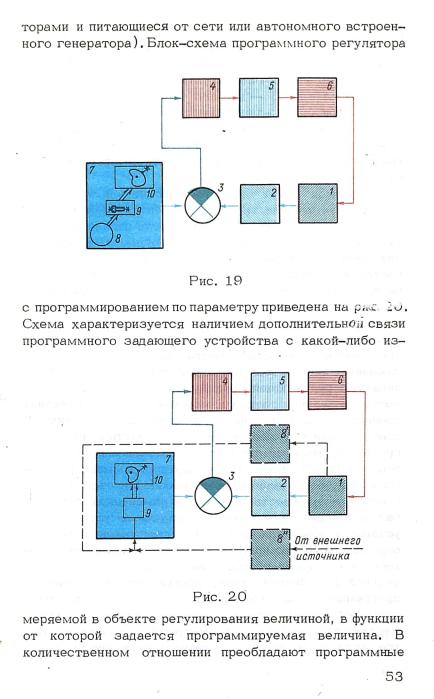
регуляторы с программированием по времени; програм мные регуляторы второй группы встречаются относи - ' тельно редко. Ыа рис. 1 9 и 2 0 приняты следующие обозначения: 1 — объект регулирования, 2 — первичный преобразователь, 3 — элемент сравнения, 4 — измери тельный прибор, 5 — регулирующее устройство, 6 — и с
полнительное |
устройство, |
7 — задающее |
устройство, |
||
8 — синхронный двигатель, 9 —. редуктор, |
1 0 — п р о |
||||
граммоноситель, 8 ' |
и 8 " — преобразователи |
сигнала |
по |
||
второму параметру. |
|
|
|
|
|
Программы |
могут |
быть |
циклические или |
жесткие |
и |
корректируемые или гибкие. Р а з у м е е т с я , между этими видами программ невозможно провести резкой границы,
так |
как практически |
почти все |
программы |
в большей |
или |
меньшей степени |
и с самой |
различной |
временной |
частотой претерпевают изменения. Причиной тому могут
быть: |
усовершенствование технологии, использование |
||
нового |
оборудования и новых измерительных |
приборов |
|
и т . д . , |
иногда |
одна и та же программа в одних |
условиях |
может |
бытьотнесена к жестким, а в других (например, |
||
при действии |
различных дестабилизирующих |
факторов: |
|
изменение параметров питающей сети, изменение т е м пературы окружающей среды и т. д. или при невозмож ности проведения точных измерений по ходу протекания процесса и др . ) должна быть отнесена к гибким. В соответствии с существованием упомянутых двух групп программ, имеются две группы программных р е г у л я т о
ров: |
жесткие и гибкие. В жестких программных |
р е г у л я |
торах |
не обеспечивается или, обеспечивается |
в малой |
степени, возможность замены или изменения программы без остановки программного задающего устройства ,и установки новой или измененной программы в течение определенного промежутка времени. В гибких програм мных регуляторах обеспечивается возможность значи тельной или полной смены программы без остановки программного задающего устройства. Жесткие програм мные регуляторы используются там, где имеют место жесткие программы с малой частотой их смены или там, где количество таких программ ограничено и между
5 4
двумя последовательными технологическими процесса ми имеется время и возможность для остановки про граммного регулятора и установки новой программы. Гибкие программные регуляторы находят применение в тех случаях, когда используются гибкие программы или жесткие программы с большой частотой их смены .
Обе группы программных регуляторов могут с т р о и т ь ся по одинаковым б л о к - с х е м а м и основные различия между ними заключаются в использовании программных задающих устройств разных типов. До недавнего в р е м е ни подавляющее большинство существовавших програм мных регуляторов относилось к группе жестких. П о следние годы характеризуются интенсивным развитием гибких программных регуляторов и значительным у в е личением числа их, так как их основными потребителями являются относительно новые виды производств такие, как производство полупроводниковых приборов, моно - и
поликристаллов, |
ряда новых э л е к т р о - и радиотехниче |
ских изделий и |
др. |
Программы, изображаемые криволинейными зависи мостями, могут быть отработаны программным р е г у л я тором либо в истинном виде, либо в аппроксимированном виде. В последнем случае заданная криволинейная зависимость заменяется с определенной допустимой погрешностью последовательностью прямолинейных о т резков. Таким образом, по способу отработки программ программные регуляторы могут быть подразделены на две группы: программные регуляторы, обеспечивающие отработку программ в истинном виде и в аппроксимиро ванном виде. Следует отметить, что практически это подразделение программных регуляторов близко к их подразделению на группы жестких и гибких программных регуляторов, поскольку отработка программы в аппрок симированном виде имеет место, как правило, в гибких программных регуляторах.
Программные регуляторы могут быть классифициро ваны по закону регулирования. Под законом регулиро вания понимается зависимость между отклонением р е гулируемой величины от ее заданного по программе
значения и величиной регулирующего сигнала. По этому признаку программные регуляторы подразделяются на программные регуляторы интегрального действия (с И -
законом |
регулирования), пропорционального |
действия |
||
(с П-законом регулирования), |
пропорционально-инте |
|||
грального |
действия |
( с ПИ - законом . регулирования), |
||
пропорционального |
с введением |
производной |
действия |
|
(с ПДзаконом регулирования), пропорционально-инте
грального с |
введением |
производной |
действия |
(с П И Д - |
||
законом |
регулирования). |
|
|
|||
Регуляторы с |
П-законом регулирования |
наиболее |
||||
просты |
и |
удобны |
в |
эксплуатации, |
однако |
системы |
автоматического |
регулирования с |
пропорциональным |
||||
регулятором |
обладают |
статической |
ошибкой |
( о т к л о н е |
||
ние регулируемой величины или ее среднего значения от заданного значения в установившемся р е ж и м е ) , пропор циональной заданному значению регулируемой величины или нагрузке. Поэтому при программном регулировании в условиях наличия глубоких и длительных возмущений входной величины (при изменении ее по программе) ж е лательно использование других регуляторов, у которых практически отсутствует статическая ошибка •— р е г у л я торов с ПИ или ПИД - законом регулирования. Р е г у л я т о ры с ПИ-законом регулирования обычно используются с объектами регулирования сравнительно небольшой инер ционностью, регуляторы с ПИД-законом регулирования (изодромные с предварением)—с объектами, обладаю щими значительным запаздыванием или инерционностью.
Расчет настроек программных регуляторов не имеет каких-либо принципиальных особенностей по отношению к другим видам регуляторов, поэтому этот вопрос не
рассматривается ввиду |
наличия |
большого |
количества |
||
литературы по |
этому |
вопросу |
/ 9 , |
1 0 / . |
Некоторые |
специфические |
виды ошибок при программном |
р е г у л и р о |
|||
вании для ряда разновидностей систем |
автоматического |
||||
программного регулирования были рассмотрены в пре дыдущей главе .
По виду выходного сигнала программные регуляторы могут быть подразделены на программные регуляторы
5 6
непрерывного действия и программные регуляторы дискретного действия. Под программными регуляторами непрерывного действия понимаются регуляторы, в к о т о
рых осуществляется |
передача, преобразование и |
в о з |
действие на объект |
регулирования регулирующего |
с и г |
нала в соответствии с каждым мгновенным значением входного сигнала регулятора. Под программными р е г у ляторами дискретного действия понима"ются регуляторы,
вкоторых происходит процесс преобразования непре
рывного сигнала в дискретный (процесс квантования),
ивыходная величина которых имеет дискретную форму. Программные регуляторы дискретного действия в
зависимости от используемого вида квантования под разделяются на следующие группы: программные р е г у ляторы релейного действия (с квантованием по уровню), программные регуляторы импульсного действия (с квантованием по времени) и программные регуляторы релейно-импульсного действия (при наличии комбиниро ванного квантования, сочетающего квантование по времени и уровню) .
Наибольшее распространение получили программные регуляторы релейного действия, выгодно отличающиеся своей простотой, малогабаритностью и дешевизной. Основным недостатком этих регуляторов является колебание' регулируемой величины, амплитуда и частота которых зависят от величины зоны нечувствительности регулятора, избытка установленной мощности над п о требляемой, от инерционности объекта регулирования и
преобразователя. Т е м не менее, программные |
р е г у л я т о |
ры релейного действия (двухпозиционные, в |
меньшей |
степени трехпозиционные и многопозиционные) нашли весьма широкое применение, в особенности, при автома тизации инерционных объектов (например, электриче ских нагревательных печей) п при отсутствии в системе регулирования значительного запаздывания. В этом
случае |
при использовании высокочувствительных р е г у |
ляторов |
релейного типа может быть обеспечена высокая |
^точность выполнения программы. При автоматизации малоинррциошгых объектов пли при наличии в системе
5 7
регулирования значительного запаздывания, как пра вило, желательно использование непрерывных програм мных регуляторов, так как в 'этих случаях затрудни тельно обеспечить малую амплитуду колебаний при и с пользовании регуляторов релейного типа. Большинство регуляторов релейного типа выполняется на контактных
элементах (в |
основном с использованием э л е к т р о м а г |
нитных р е л е ) , |
что не обеспечивает высоких характери |
стик этих регуляторов по надежности. Создание бескон тактных регуляторов релейного типа / 1 9 , 2 0 / позволя ет устранить этот недостаток.
Одним из способов улучшения качества регулирования в системах с релейными регуляторами является переход к релейно-импульсному регулированию. Использование релейно-импульсных регуляторов обеспечивает значи тельно меньшие амплитуды колебаний регулируемой
величины в процессе регулирования. Переход |
от р е г у л я |
торов релейного типа к релейно-импульсным |
р е г у л я т о |
рам реализуется обычно введением корректирующих обратных связей (термических или на пассивных' ЦС- цепочках). Ч а с т о в таких регуляторах закон регулиро вания определяется по аналогии с непрерывными р е г у ляторами, рассматривая релейно-импульсные р е г у л я торы как квазинепрерывные относительно среднего
значения |
выходного сигнала. |
В с о о т в е т с т в и и . с |
этим |
различают |
релейно-импульсные |
регуляторы с П, |
ПИ и |
ПИД-законами регулирования. В других случаях норми руют параметры импульсного выходного сигнала, у ч и тывая период, время включения и скважность / 2 1 / . Следует отметить, что обладая лучшими техническими характеристиками, релейно-импульсные регуляторы у с тупают в простоте и надежности.
В ряде случаев рационально применение регуляторов импульсного действия, например, когда необходимо уменьшить расход энергии в исполнительном устройстве, облегчить режим работы измерительного устройства по нагрузке его выходных цепей и т . д . В подобных регуляторах присутствует импульсное звено, которое преобразует непрерывное входное воздействие в п о с л е -
5 я
довательность импульсов, величина амплитуды, д л и тельность или частота повторения которых зависит от величины входного воздействия в отдельные моменты времени; знак импульсов определяется полярностью отклонения регулируемой величины.
К программным регуляторам дискретного действия относятся программные цифровые регуляторы, которые развиваются наиболее интенсивно. Цифровые регуляторы (иными словами регуляторы, основанные на и с п о л ь з о вании элементов дискретной техники), относятся к
группе релейно-импульсных регуляторов или |
р е г у л я т о |
ров комбинированного действия, т. е. таких, |
выходная |
величина которых претерпевает в отдельные моменты времени скачкообразные изменения. Уровень скачка определяется составляющей дискретного действия. В интервале между скачками регулирующее воздействие определяется составляющими непрерывного действия. Развитие цифровых регуляторов интенсивно стимулиру ется распространением систем централизованного кон троля, электронных вычислительных машин и других устройств, выполненных на элементах цифровой техники, а также появлением и развитием частотных преобразо вателей, позволяющих в ряде случаев достичь весьма высокой точности измерения. Кроме того, цифровые регуляторы имеют ряд достоинств по сравнению с д р у гими: большая точность, быстродействие, повышенная надежность, удобство настройки и т . п . / 2 2 / . Необходи мость создания программных задающих устройств с п о вышенными техническими характеристиками и програм мных задающих устройств для "гибких" программных регуляторов заставила активно использовать элементы дискретной техники для конструирования этих устройств / 2 3 , 2 4 / .
Находят применение также программные регуляторы комбинированного исполнения, состоящие из блоков, выполненных как на дискретных, так и на аналоговых элементах, например, аналоговые регуляторы в с о ч е т а нии с программными задающими устройствами, выпол ненными на элементах цифровой техники; на аналоговых
5 9