

книги из ГПНТБ / Страшун А.З. Программные регуляторы технологических процессов
.pdf
где |
Д("'.\ш.ч'Н )• |
Д^макс)-) — |
амплитуды положитель-' |
ных отклонений регулируемой величины. |
|||
Практически |
существующие |
двухпозиционные р е г у л и |
|
рующие устройства не обладают идеальной релейной характеристикой, а характеризуются наличием зоны нечувствительности, величиной которой часто нельзя пренебречь. С учетом зоны нечувствительности р е г у л я тора выражения для амплитуд положительных и отрица
тельных отклонений регулируемой величины будут |
иметь |
||||||
следующий вид / 1 3 / : |
|
|
|
|
|||
* e M n K |
C ( + , = Ьве~ |
W |
Н ч а к с |
(\-е~ |
|
|
|
|
|
|
+ Н : , ( ^ - т ) / 1 ^ - Н 3 ( 0 , |
(30а) |
|||
Д в н 1 к с , _ , = |
8 в е " « - |
в, (t - |
t) < f |
4- в 3 ( 0 , |
(306) |
||
где |
56 — |
зона |
нечувствительности |
двухпозиционного |
|||
регулятора. |
Из выражений ( 3 0 |
а ) и ( 3 0 б ) может |
быть |
||||
определена полная амплитуда отклонения регулируемого параметра в системе двухпозиционного программного регулирования / 1 3 / :
д в И П к с = л е м а к с Н . ) - ь д е м а к с ( _ ) - е м ; 1 К С ( i - е ''^ +
|
|
|
|
+ 2№е~Тм, |
|
|
(31) |
|||
где |
Д ® м а к с — |
полная амплитуда |
отклонения |
р е г у л и |
||||||
руемой величины. |
|
|
|
|
|
|
|
|
|
|
Таким |
образом, |
из |
выражения |
( 3 |
1 ) |
очевидно, |
что |
|||
'полная |
амплитуда |
отклонений |
регулируемой |
величины |
||||||
в данном случае не зависит от величины |
<->я (t) |
и |
||||||||
при постоянстве параметров объекта |
( 7 0 б , |
-:) |
п о с т о |
|||||||
янна для всех участков программы. |
|
|
|
|
|
|||||
Из выражений ( 3 0 а ) |
и ( 3 0 |
б ) |
может |
быть |
о п р е д е л е |
|||||
на разность амплитуд положительного и отрицательного отклонений регулируемой величины, характеризующая
степень несимметричности |
колебаний относительно з а |
||||
данного значения регулируемой величины: |
|||||
х е н а 1 ( С |
= д е ы а к с И л е м а к с ( |
, - « м а к с ( \ - е |
/ » « ) i |
||
|
|
|
+ 293(t-t)e"7^-2e.l(t), |
(32) |
|
где |
' ^ м а к с |
— |
разность амплитуд |
положительного и |
|
отрицательного |
отклонений. |
|
|||
Из |
выражения |
( 3 2 ) может быть сделан вывод, что на |
|||
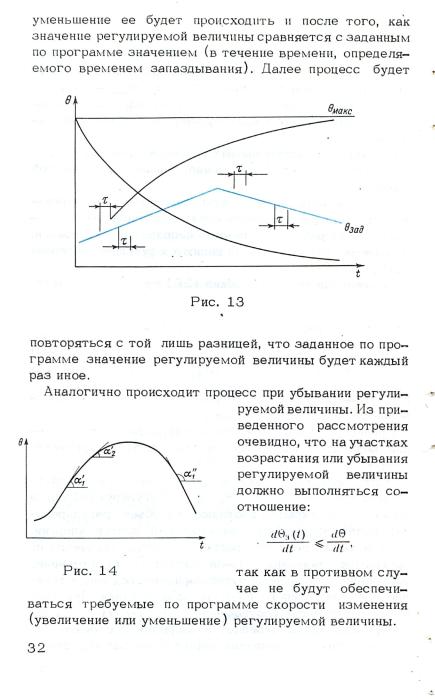
большей части диапазона регулирования колебания име ют несимметричный характер. Следствием несимме тричности колебаний является смешение среднего з н а чения регулируемой величины относительно заданного значения. Данное смещение носит название остаточного отклонения, причем величина и знак его, как видно из
выражения ( 3 2 ) , существенно |
зависят от |
заданного |
значения регулируемой величины и поэтому |
меняются |
|
от точки к точке программы. |
|
|
Выше было отмечено, что на |
участках |
программы |
с возрастанием значений регулируемой величины должно выполняться соотношение ( 2 8 ) ; из этого соотношения следует:
В то же время очевидно, что полная амплитуда |
откло |
||
нений регулируемой величины |
Д^ыакс |
н е |
должна |
превосходить допустимой по техническим условиям
величины |
Д 1 0 п 1 то есть |
А в м в к с < Dvm _ |
Учитывая |
выражение |
( 3 1 ) , получим: |
|
|
в - « - * 1-ехр(-т/7-о б ) ' (34)
Из выражения ( 3 3 ) и ( 3 4 ) по известным параметрам объекта регулирования, регулятора и программной кри вой может быть определена область допустимых для
3 5
данного случая значений величины |
^'махс. |
а по в ы |
бранному из этой области значению |
Йч | |
определено |
соответствующее ему значение максимального притока энергии в объект регулирования.
Длительность включенного и отключенного состояния регулирующего органа, а, следовательно, период и ч а стота колебаний могут быть без труда определены для
постоянного значения |
задания регулируемой |
величины |
|
Н, |
/ 1 4 , 1 5 / . |
|
|
Ввиду |
зависимости |
отклонений от величины |
Н 1 ( их |
значения |
будут меняться при изменении заданного з н а |
||
чения регулируемой величины по программе. Суммарная для всей программы длительность включенного и о т ключенного состояний регулирующего органа опреде
лится |
суммированием этих длительностей для всех |
точек |
программы. |
Для объектов регулирования, описываемых дифферен циальными уравнениями второго или более высокого
.порядка, получение аналитических зависимостей и в ы полнение графических построений становится весьма трудоемким. В э т о м случае наиболее рационально либо экспериментальную переходную характеристику аппрок симировать экспоненциальным графиком с участком запаздывания, что во многих случаях позволяет полу чить верную качественную картину и близкие количест венные соотношения, а далее расчет производить с учетом указанных выше особенностей, либо производить моделирование процессов регулирования на электронных моделирующих машинах непрерывного действия / 1 4 / .
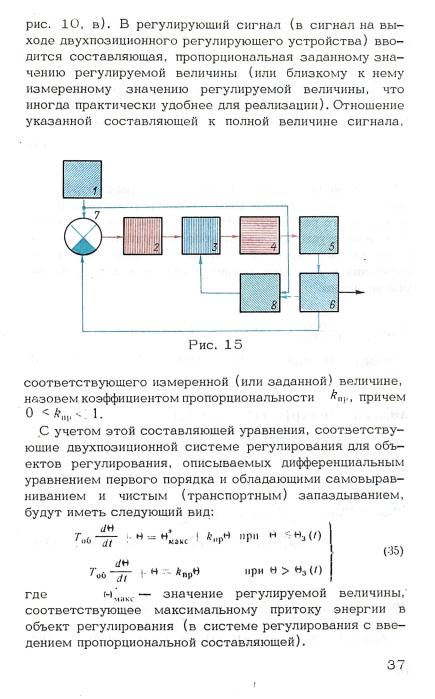
Двухпозиционное программное регулирование по к о м бинированному принципу. Существенного улучшения па раметров с и с т е м двухпозиционного программного р е г у лирования можно достичь, используя комбинированный принцип, т. е. используя не только сигнал, с о о т в е т с т в у ющий отклонению регулируемой величины от заданного
значения, но |
и сигнал, пропорциональный самой |
в е л и |
чине задания |
/ 1 6 / . Структурная схема подобной |
с и с т е |
мы автоматического программного регулирования при ведена на р и с . 1 5 (обозначения т е же, что и на
3 6
Решения системы уравнений ( 3 5 ) будут иметь следу ющий вид:
° = |
Т = 1 ^ + ( Р ° |
~ |
е х р [ " ~ ' 0 - ~ М / г о б ] при е < |
е э ( о J |
В = |
Вп ехр [ - 1 (1 - |
Ап р )/Го б ] |
при е |
> е 3 (О I |
|
|
|
|
(36) |
Из выражения ( 3 6 ) по аналогии с уже рассмотренным ранее случаем с учетом зоны нечувствительности двухпозиционного регулирующего устройства можно опреде лить амплитуды положительного и отрицательного от клонений регулируемой величины, полные амплитуды колебаний и разности амплитуд отклонений регулируе мой величины.
9*
1 |
я п р |
|
|
|
|
|
|
-,- » « ехр [ - х |
(1 - |
Ап р )/То 6 | }- Нэ (t-z) |
ехр [ - |
х (1 - |
Ап р )/Го б 1 - |
В3 (О |
|
|
|
|
|
|
|
|
(37) |
Д в м . к с ( - ) = |
8 0 |
ехр [ - т (1 |
- knp)/To6] |
- |
|
|
|
- в 3 |
(t - |
х) ехр [ - |
* (1 - |
кпруТой] + |
в 3 (t), |
(38) |
|
Д ( 4 к с = < . к с ( - Н + ^макс(-) = |
{1 - ехр [ - х (1 |
- |
1 |
Л п р |
|
- М / ^ о б ] ! + 2 й В е х р [ - х ( 1 - А п р ) / Г о в ] , |
(39) |
|
- ДВ.:а к с Н , - Д в ; , ^ , , = |
{ j _ е х р |
[_ , ( 1 |
_ |
|
- * п р ) / 7-„о] + 2В3 (t - х) ехр [ - х (1 - |
* п р ) / Tot] |
- 2в3 |
(/), |
(40) |
3 8
Г Де |
ДЙГ,акс1-| », |
Д Н макс(~>, |
А Н * а к с , |
Х в * а к с — |
с оответственно 'амплитуды положительного и отрица тельного отклонений, полная амплитуда колебаний и разность амплитуд отклонений регулируемой величины в системе двухпозиционного программного регулирования
свведением пропорциональной составляющей.
По аналогии с рассмотре'нной системой двухпозицион ного программного регулирования с пропорциональной
составляющей определим минимально допустимое зна чение вмакч-:
' - С а к с = |
[(1 — Кр) ©о,' + |
t g C . - r o 6 еХр |
[ * м а к Ч О |
~ |
Кр)!Тоь}) |
||||||
|
|
|
|
|
|
|
|
|
|
|
(41) |
Сравним |
величины |
в* |
и |
0 |
,„„ |
определенные |
|||||
в формуле ( 3 3 ): |
M3KL |
|
|
МЗКС |
|
|
|
||||
|
|
|
|
|
|
|
|
||||
Тумаке = |
©макс ~ |
®макс = |
© о А р |
+ t g <*/ Той |
{ e x p (t'ueKC,/Тоб) |
- |
|||||
|
|
|
|
- е х р [ 4 к с / ( 1 |
-КР)!Т06)), |
|
(42) |
||||
где |
v 0 M a K C |
— разность между величинами |
в м а к с |
и |
|||||||
<_)* |
|
|
|
|
|
|
|
|
|
|
|
•'макс. |
|
|
|
|
|
|
|
|
|
|
|
Из формулы |
( 4 2 ) очевидно, что |
|
7® м а к с ^ 0, |
с л е |
|||||||
довательно, |
при введении в |
систему |
двухпозиционного |
||||||||
программного регулирования пропорциональной с о с т а в ляющей величина максимального притока энергии в
объект регулирования |
и соответствующее ей |
значение |
регулируемой величины |
0 и а к с могут быть |
снижены. |
Следствием э т о г о явится уменьшение полной ампли туды колебаний регулируемой величины и разности амплитуд положительного и отрицательного отклонений, что видно из следующих выражений (при учете получен
ных выше соотношений): |
|
||
2 о 9 < в* , 0 |
> 0 * |
0 < 0 ' |
|
х х |
макс' |
макс |
макс' л ^- макс |
|
|
|
|
3 9