книги из ГПНТБ / Страшун А.З. Программные регуляторы технологических процессов
.pdf2 . Блок |
командных реле |
Б К Р , включающий реохорд - |
задатчик |
/?.,, электронное |
реле Э Р и два выходных реле |
( Р О — реле открытия регулирующего органа, Р З — р е л е закрытия регулирующего о р г а н а ) .
3 . Блок задания скорости БЗС, включающий ревер
сивный конденсаторный |
двигатель типа |
Д 3 2 |
и с х е м у |
||
изменения скорости двигателя . |
|
|
|
||
4 . Блок |
управления Б У , состоящий из |
реохорда у п |
|||
равления |
Ry, реохордов установки предельных |
значений |
|||
параметров на участках |
/?,,, н у л ь - р е л е . |
|
|
||
5 . Блок |
переключения |
БП, |
включающий |
шаговый |
|
искатель ШИ и реле . |
|
|
|
|
|
6 . Р е л е |
времени Р В . |
|
|
|
|
7 . Исполнительные механизмы И М . |
|
|
|||
8 . Термическая обратная связь |
Т О С . |
|
|
||
Измерительный прибор ИП через обегающее у с т р о й
ство |
( О У ) |
производит |
подключение преобразователей |
( Д ) |
той или |
иной зоны |
объекта и одновременно п о д г о |
тавливает цепи исполнительных механизмов при помощи
реле ( P I — Р 4 ) . Реохорд |
датчик ( |
) |
совместно с |
реохордом-задатчиком R.j |
образуют |
мост, |
сигнал в ы |
хода с которого поступает на усилитель блока команд
ных р е л е ( Б К Р ) . Ползунок реохорда-задатчика |
п е р е м е |
щается двигателем блока задания скорости |
( Б З С ) . |
Скорость ротора двигателя определяется постоянной составляющей тока, протекающей по обмотке двигателя. Схема изменения постоянной составляющей тока выпол нена на выпрямителе и ряде переменных сопротивлений, величина которых устанавливается оператором.
Если при программном изменении задания на данном участке регулируемый параметр не соответствует з а д а нию, тогда срабатывает одно из двух реле Р О или РЗ блока Б К Р , которые включают цепи исполнительных м е ханизмов ИМ, и происходит изменение подачи энергии в объект; одновременно эти реле подключают т е р м и ч е скую обратную связь на ЕХОД усилителя Б К Р . П е р е к л ю чение с одного участка программы на другой произво дится блоком управления, в котором производится сравнение требуемого программой предельного уровня
1 0 0
параметра на данном участке с фактическим; как только
уровни совпадут, сработает |
н у л ь - р е л е |
H P , |
которое |
переведет шаговый искатель |
ШИ блока |
переключений |
|
БП в новое положение — на новый участок программы. Если это участок выдержки параметра, тогда сработает
реле |
времени |
и отключится двигатель БЗС; после того, |
как |
пройдет |
установленное на реле Р В время, будет |
подан сигнал переключения на новый участок програм
мы и будет включен БЗС, изменяющий задание с |
у с т а |
||
новленной |
скоростью. |
|
|
Работа |
устройства на других участках проходит |
т а к |
|
же. Особенностью рассмотренного программного |
у с т |
||
ройства является е г о работа |
в координатах " у р о в е н ь - |
||
скорость", |
т. е. переключение |
на последующие участки |
|
программы происходит при достижении заданного з н а
чения |
уровня. В |
с х е м е применен метод |
изменения |
с к о |
||||||||
рости |
двигателя |
изменением величины |
постоянной с о |
|||||||||
ставляющей в обмотках двигателя . |
|
|
|
|
|
|||||||
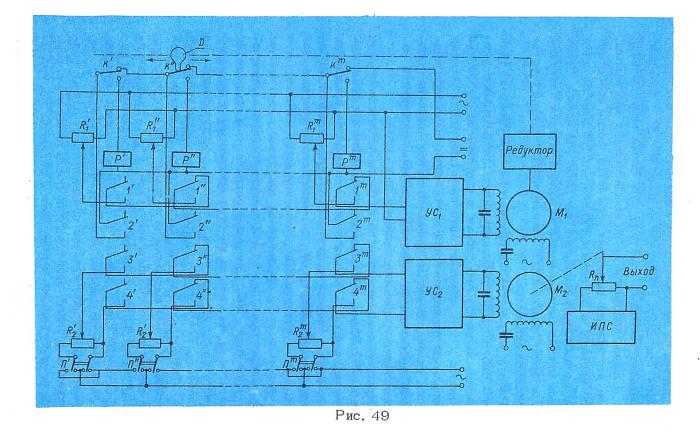
Программный |
задатчик |
по / 2 3 / и м е е т |
два двигателя |
|||||||||
(рис. |
4 9 ) . Один |
( M l )задает |
координату |
времени |
в ы |
|||||||
держки, второй |
|
( М 2 ) |
определяет |
скорость |
изменения |
|||||||
параметра. |
Выходное |
устройство |
представляет |
собой |
||||||||
точный потенциометр |
Цч, |
питаемый |
стабилизированным |
|||||||||
источником питания МПС. Ползунок |
э т о г о |
потенциомет |
||||||||||
ра перемещается |
по |
заданной |
программе |
двигателем |
||||||||
М 2 . Скорость двигателя |
М 2 зависит от сигнала на |
в х о |
||||||||||
де усилителя |
У С 2 . Величина |
сигнала |
устанавливается |
|||||||||
оператором |
на |
каждом участке программы |
с помощью |
|||||||||
реостатов |
|
|
а знак сигнала, поступающего на |
|||||||||
усилитель, |
определяется |
положением |
переключателей |
|||||||||
п'"т |
Последовательность |
подключения |
участков |
про |
||||||||
граммы и время выдержки на соответствующих участках
определяется состоянием контактов |
/г'". На валу д в и г а |
теля M l укреплен кулачок — Q |
перемещающийся п о |
ступательно при вращении вала. Перемещаясь, кулачок
последовательно замыкает |
электрические контакты |
fc"<. |
||||
Время, |
за |
которое |
кулачок |
продвинется от одного |
кон |
|
такта |
до другого, |
зависит от скорости вращения ротора |
||||
M l , |
а |
е г о |
скорость определяется сигналом поступаю- |
|||
|
|
|
|
|
|
1 0 1 |
щмм на вход усилителя УСХ; |
этот сигнал зависит от по |
|||||||||
ложения |
ползунков |
реостатов |
R"', |
|
устанавливаемых |
|||||
оператором. |
|
|
|
|
|
|
|
|
||
При |
замыкании контакта |
К' |
включится |
реле |
f и |
|||||
с реостата А?,' на усилитель |
поступит |
сигнал, |
определя |
|||||||
ющий |
скорость |
вращения двигателя |
М/, одновременно |
|||||||
реле |
Р' |
замкнет контакты |
.3—4 и на |
усилитель |
у., |
|||||
поступит |
сигнал |
с |
реостата |
AV, |
который |
определит |
||||
скорость |
вращения |
ротора |
двигателя |
и |
ползунка |
|||||
потенциометра |
R„. |
С этой |
скоростью |
ползунок |
будет |
|||||
перемещаться до момента переключения на новый уча сток, когда двигатель Л/, включит контакт /(". Обход остальных участков происходит в таком же порядке.
При применении двухфазных асинхронных двигателей проявляются следующие их недостатки: малая кратность изменения скоростей — порядка 1 5 ; существенная нелинейность регулировочных характеристик; зависи мость скорости вращения от напряжения в обмотке управления при различных величинах момента сопро
тивления; |
зависимость скорости |
вращения двигателя |
|||
от |
частоты, тока питания, а также от |
амплитуды; по |
|||
грешность |
отработки |
программы |
будет |
накапливаться |
|
от |
участка |
к участку; |
общая погрешность будет с у м м и |
||
роваться по погрешностям на временном и скоростном
участках; |
шкалы |
реостатов |
А\' |
и |
нелинейные. |
|||
Выполненный |
задатчик |
имеет двенадцать |
участков; |
|||||
продолжительность |
по |
времени |
2 — 2 0 |
мин |
каждого |
|||
участка; |
изменение |
скорости |
параметра |
0 , 2 |
°С/мин — |
|||
2 °С/мин |
на каждом участке . |
|
|
|
|
|||
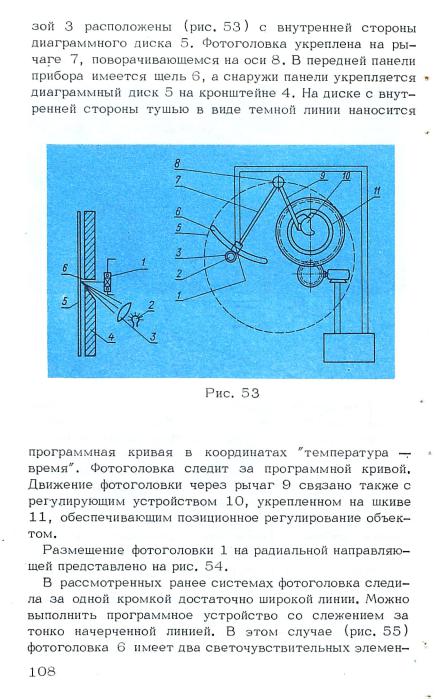
1 3 . Программные задатчики с |
бесконтактными |
|||||||
следящими системами. Фотоследяшая система |
||||||||
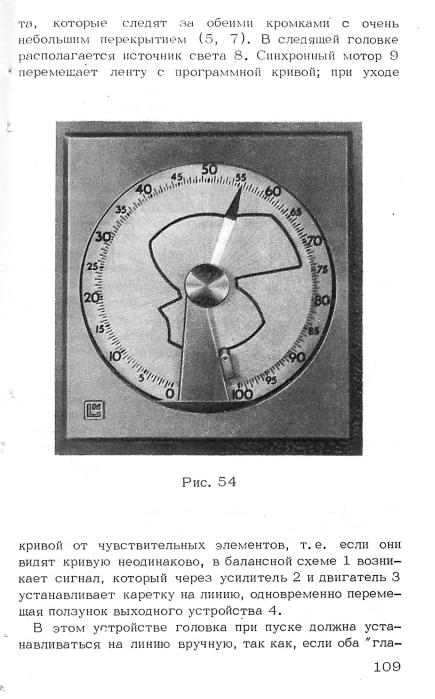
Бесконтактное фотослежение |
за программной кривой, |
|||||||
нанесенной на диаграммную ленту, было |
впервые о с у |
|||||||
ществлено в задающих и регулирующих |
программных |
|||||||
устройствах |
типа Р У - 5 - 0 1 / 0 2 . |
|
|
|
||||
Затем этот принцип был довольно широко применен в разных вариантах в ряде приборов для такой же цели. Поэтому остановимся на нем более подробно.
1 0 3
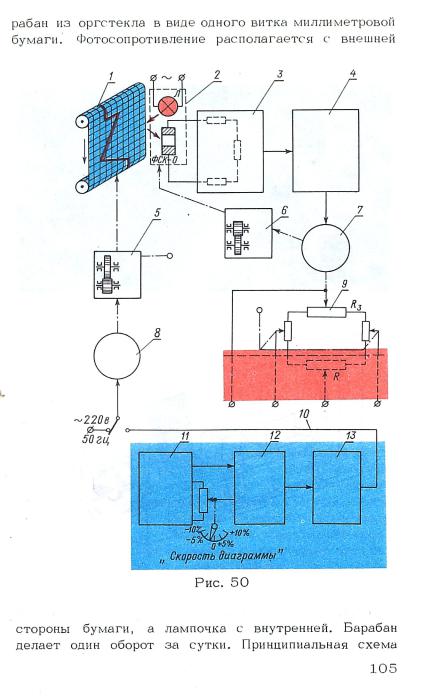
На диаграммную ленту прибора (рис. 5 0 ) карандашом, тушью или чернилами наносится задаваемая программа
в виде темной полосы 1 . Одна кромка этой полосы |
д о л |
|
жна возможно точнее соответствовать программе; |
т о ч |
|
ность вычерчивания второй кромки |
не имеет значения. |
|
За точно нанесенной кромкой следит |
• фотоголовка |
2 . |
Синхронный двигатель 8 через внешний редуктор 5 перемещает диаграммную ленту; этим задается ордина та времени. Скорость движения ленты может меняться
от 2 0 |
мм до 3 6 0 мм/ч (либо |
от 2 0 0 |
мм/ч до |
3 6 0 0 |
м м / ч ) . |
|
|
Фотоголовка может быть выполнена |
в двух |
вариантах: |
|
при работе на проходящем свете и при работе на отра женном с в е т е . На рис. 5 0 представлена фотоголовка, работающая на отраженном с в е т е . В э т о м варианте свет от лампочки отражается от кромки программной кривой и попадает на фотосопротивление. Фотосопротив ление является плечом мостовой схемы 3 , которая уравновешена тогда, когда фотосопротивление освеща ется наполовину.
При движении ленты с программой освещение фото сопротивления меняется и равновесие моста наруша ется; сигнал разбаланса усиливается усилителем 4 , на выход которого подсоединен реверсивный двигатель 7 с редуктором 6 . Двигатель перемещает фотоголовку 2 до тех пор пока не будет достигнуто равновесие моста 3 . Одновременно двигатель изменяет параметры выходно г о устройства 9 задатчика. С целью изменения с к о рости продвижения ленты синхронный двигатель может получать питание не от сети, а от встроенного в прибор
управляемого генератора 1 0 , состоящего из блока |
пита |
ния 1 1 , мультивибратора 1 2 и усилителя мощности |
1 3 . |
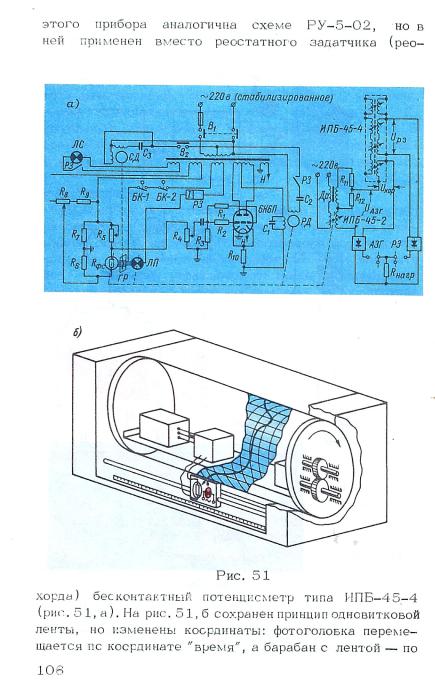
В ряде технологических процессов и процессов управ ления целесообразно иметь программирование в течение суток с простой заменой суточного графика-или п о в т о
рением |
е г о (например, |
задание суточного графика на |
||
грузки |
электростанций |
и перетоков мощности) . В связи |
||
с этим |
была |
предложена переделка Р У - 5 - 0 2 |
/ 4 1 / |
|
таким образом, |
чтобы |
программа укладывалась |
на б а - |
|
1 0 4 |
|
|
|
|