книги из ГПНТБ / Страшун А.З. Программные регуляторы технологических процессов
.pdf
г о напряжения 1 ; |
сигналы управления на д е л и т е л ь |
п о |
|
ступают от блока |
управления 8 при достижении |
на |
в ы |
ходе интегратора |
заданных величин на отдельных |
у ч а с т |
|
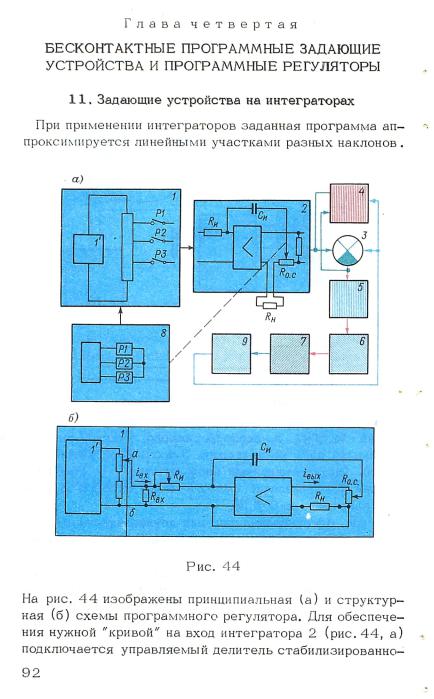
ках программы. Участки выдержки времени обеспечива ются реле времени. Выход интегратора подключается к устройству сравнения 3 , куда поступает также сигнал от преобразователя 9 . С целью измерения истинного значения параметра и отклонения е г о "от заданного з н а чения, в систему подсоединен прибор 4 . Сигнал р а з б а ланса поступает на регулирующее устройство 5 , а з а т е м на исполнительное устройство 6 , которое изменяет п о
дачу энергии в объект |
7 , |
Интегратор на ftC |
цепи (рис. 4 4 , 6 ) позволяет п о л у |
чить линейно изменяемый выходной сигнал в интервале от секунд до нескольких часов. Время интегрирования
зависит |
от |
параметров |
интегрирующей |
цепочки |
ftu и |
|||||||
С,| |
обратной |
связи |
ft |
|
и |
сигнала |
на |
в х о д е . |
Из |
|||
рис. |
4 4 , б |
следует: |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
' в ы* |
_ |
Rax |
1 |
|
|
|
|
|
|
|
|
|
'пх |
|
Roc |
Тр |
|
|
|
|
отсюда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
• |
_ |
U |
^ |
1 |
|
|
|
|
|
|
|
|
'аы* |
~ |
Roc |
R„C„p- |
|
|
|
|
|
или |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
'вы* |
- |
Roc |
/?„С,Г |
|
|
|
|
|
Время интегрирования |
определяется |
по |
формуле: |
|
||||||||
'л- = |
'iiux^ndWcK- |
t/itx |
|
Таким образом, |
имеется |
н е |
||||||
сколько |
параметров, за счет которых |
можно менять |
в р е |
|||||||||
мя интегрирования. Это позволяет создать програм мный задатчик с широкими диапазонами настроек по скорости изменения параметра.
Погрешность интегрирования, а также линейность выходного сигнала определяются постоянством пара метров интегрирующих сопротивления и емкости во времени и от температуры. Для интегрирования ( н е -
9 3
с к о л ь ко ч а с о в ) сопротивление R» должно быть порядка сотен мом, а конденсатор должен иметь очень большое
сопротивление |
не менее 1 0 0 0 0 мом . Современная т е х |
||
ника |
дает такие элементы: сопротивления типа |
К Л М , |
|
К И М , |
конденсаторы типа М П Г О или К 7 1 - 4 - 1 0 . |
|
|
Источник |
входного сигнала 1 ' должен иметь |
в ы с о |
|
кую |
стабильность во времени и от температуры. |
Кроме |
|
того, |
этот источник должен давать возможность |
и з м е |
|
нять |
величину выходного напряжения для изменения |
||
времени интегрирования. Применение в интегрирующей цепочке сопротивлений больших величин требует весьма
больших входных сопротивлений усилителя. Э т о г о |
уда |
|||
ется достичь |
применением входного модулятора у с и л и |
|||
т е л я на варикапах или |
МОП - транзисторах . В этих |
с л у |
||
чаях получают |
входное |
сопротивление |
порядка 1 0 9 |
Ом . |
- Интегратор, |
выполненный по с х е м е |
4 4 , а имеет |
с л е |
|
дующие |
характеристики: |
|
|
|
|
|
|
||||
1 . Время интегрирования до 1 0 |
ч. |
|
|
|
|||||||
2 . Погрешность интегрирования на интервалах до 1 ч |
|||||||||||
порядка 1 % , на |
интервалах до 2 4 |
ч. —порядка 2 , 5 % , на |
|||||||||
интервалах |
до |
1 0 ч |
— |
порядка 4 , 5 % (при температуре |
|||||||
2 0 — 6 0 |
° С ) . |
|
|
|
|
|
|
|
|
||
3 . |
Нелинейность |
выходного |
сигнала |
при |
временах |
||||||
интегрирования |
1 0 |
сек |
— |
1 0 0 |
мин при |
температуре |
|||||
2 0 — 6 0 |
° С |
близка |
к нулю, а при временах до 4 0 0 м и н - |
||||||||
около |
± 0 , 3 5 % . |
|
|
|
|
|
|
|
|
||
4 . Пульсация |
выходного |
сигнала |
составляет |
0 , 2 5 % |
|||||||
частотой |
1 0 0 |
гц. |
|
|
|
|
|
|
|
||
Задатчик |
на |
таком |
интеграторе |
позволяет |
менять |
||||||
программу во время технологического процесса; выход
задатчика |
бесконтактный. |
Задатчик |
типа С Р - 1 1 также выполнен на RC интег |
раторе с большой постоянной времени. Продолжитель
ность |
участков |
подъема |
и |
спада 5 — 5 0 |
ч. |
Участки |
||
выдержки до 2 |
8 ч.осуществляются с помощью |
таймеров |
||||||
(реле времени); выходной сигнал — 8 , 5 в |
пост, |
тока; |
||||||
стабильность |
регулирования |
(на уровне |
1 4 0 0 |
° С ) |
||||
1 0 , 0 8 5 % при |
изменении |
температуры |
окружающего |
|||||
воздуха |
от 1 0 |
до |
3 0 ° С ; |
при |
колебании напряжения на |
|||
9 4

т е ля может быть изменена за счет входного сигнала,
подаваемого на схему . |
|
|
|
|
|||
Схема |
привода |
двигателя включает в себя: задатчики |
|||||
скорости |
( 1 , 1 ' , |
1 " |
) ; |
усилитель напряжения 2 , у с и |
|||
литель |
мощности |
3 ; |
двигатель |
4 ; |
тахогенератор 5 и |
||
блок питания 6 . |
|
|
|
|
|
||
Реостатами-г-задатчиками скорости |
( 1 , 1 ' , 1",...) |
||||||
устанавливается |
нужная |
скорость вращения двигателя |
|||||
на разных |
участках программы; |
для обеспечения б о л ь |
|||||
шего диапазона пропорционального изменения скорости
двигателя в с х е м у его управления вводится |
т а х о м е т р и - |
ческая обратная связь. |
|
Двигатель 4 через редуктор 7 перемещает |
ползунок |
задатчика 8 измерительного моста 1 1 , 1 1 ' , 1 1 " и 1 2 (преобразователь температуры) с заданной скоростью; одновременно поворачивается кулачковый диск со шка
лой 9 , |
который по окончании одного участка |
своим |
||||
кулачком |
1 0 |
включает |
через микропереключатель |
реле |
||
времени |
1 8 |
и отключает следящую систему . Р е л е |
в р е |
|||
мени отрабатывает участок выдержки параметра на |
||||||
заданном уровне, а после э т о г о замыкает контакт |
||||||
следующего |
задатчика |
скорости |
и подключает |
|
через |
|
контакт |
2 2 |
следящую |
систему, |
обеспечивая |
подъем |
|
температуры с новой скоростью. |
|
|
> |
При разбалансе моста, сигнал поступает |
на |
усилитель |
|
1 4 , далее на фазочувствительный усилитель |
1 5 , управ |
||
ляющий исполнительным устройством |
1 6 , |
изменяющим |
|
подачу энергии на нагреватель 1 3 печи |
1 9 . |
|
|
Особенностью этой схемы является применение одного "скоростного" двигателя, скорость которого определяется сигналом, подаваемым на схему управления. Для у в е л и чения диапазона пропорционального изменения скорости двигателя применена тахометрическая обратная связь .
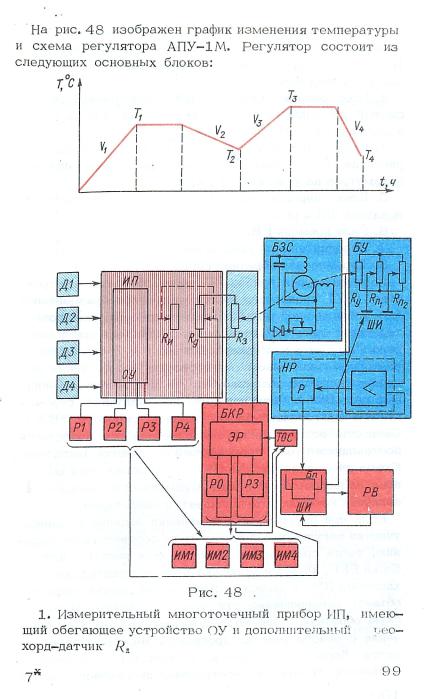
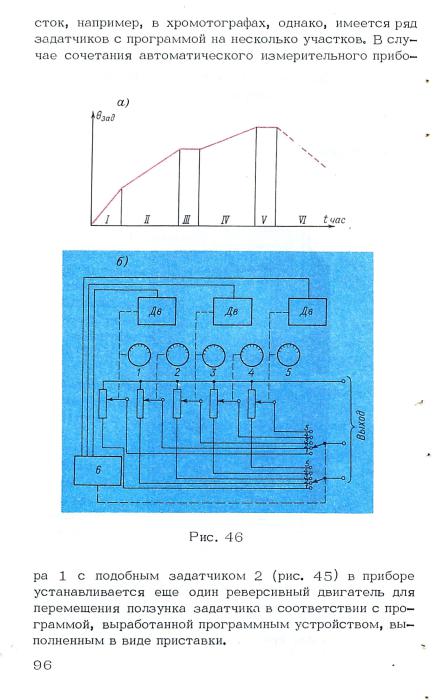
В другой системе — программном регуляторе |
А П У - 1 М |
задатчик выполнен также на реле времени и на |
с к о р о с т |
ном двигателе, однако, управление скоростью двигателя иное, чем у ранее рассмотренных задатчиков; кроме того, этот регулятор позволяет вести регулирование в нескольких точках.
9 8