

5. Аналитические методы определения усилий в плоских статически определимых фермах. Рекомендации по конструированию.
5.1 Метод вырезания узлов
Рассмотрим на примере треугольной фермы, показанной на рис. 5.1
P=4000кH,
α=![]()
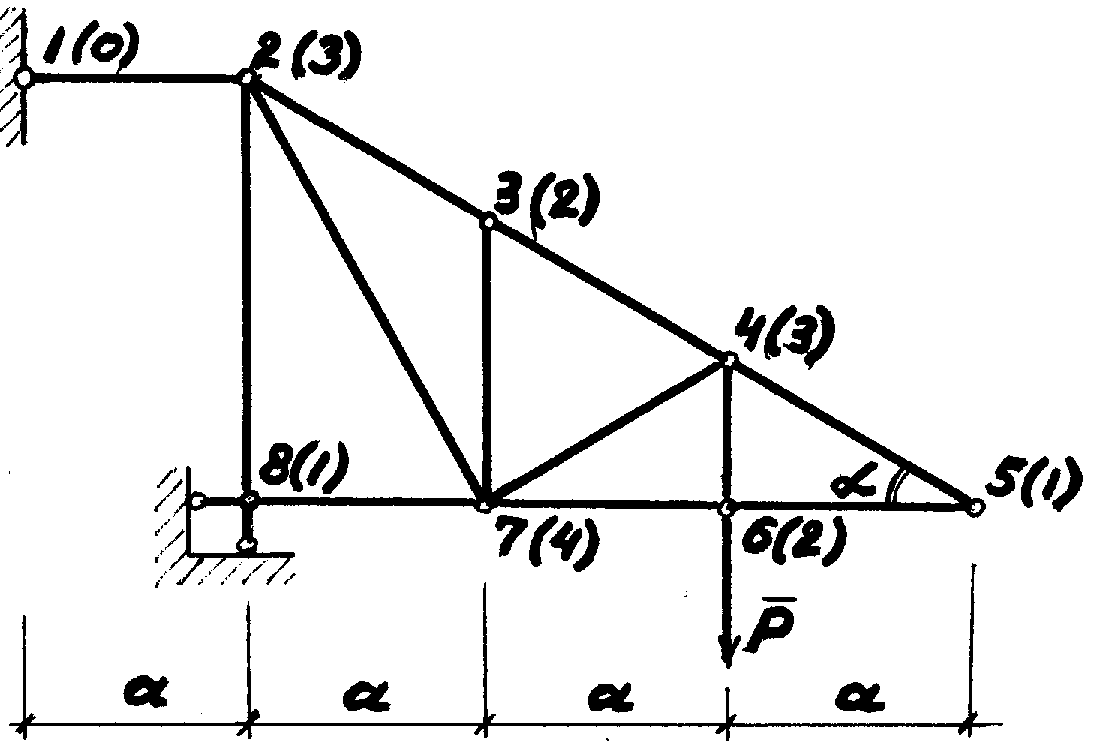
Рис.5.1.
Распределённым весом элементов ферм пренебрегают, их вес сосредотачивают в узлах.
В данном случае мы совсем не будем учитывать собственный вес фермы.
У фермы две шарнирно-неподвижные опоры: 1 и 8
Каждая из них отнимает у соответствующих узлов по две степени свободы.
а) Кинематический анализ фермы.
В скобках рядом с номерами поставлена кратность каждого узла.
 .
.
Ферма статически определима.
Диски 4-5, 6-5, 4-6 тремя шарнирами, не лежащими на одной прямой, образуют жёсткий диск.
К нему аналогично: шарнирами, не лежащими на одной прямой, присоединены диски 4-7 и 7-6, которые образуют единый диск.
Последовательно проведя анализ, приходим к выводу, что ферма в границах узлов 2,5,8
образует единый диск, который с основанием (тоже диском) соединён тремя стержнями,
оси которых не пересекаются в одной точке.
Следовательно, ферма и мгновенно неизменяема.
б) Определение опорных реакций.
Условно отбрасываем опоры, заменяя их действия реакциями (рис. 5.2).
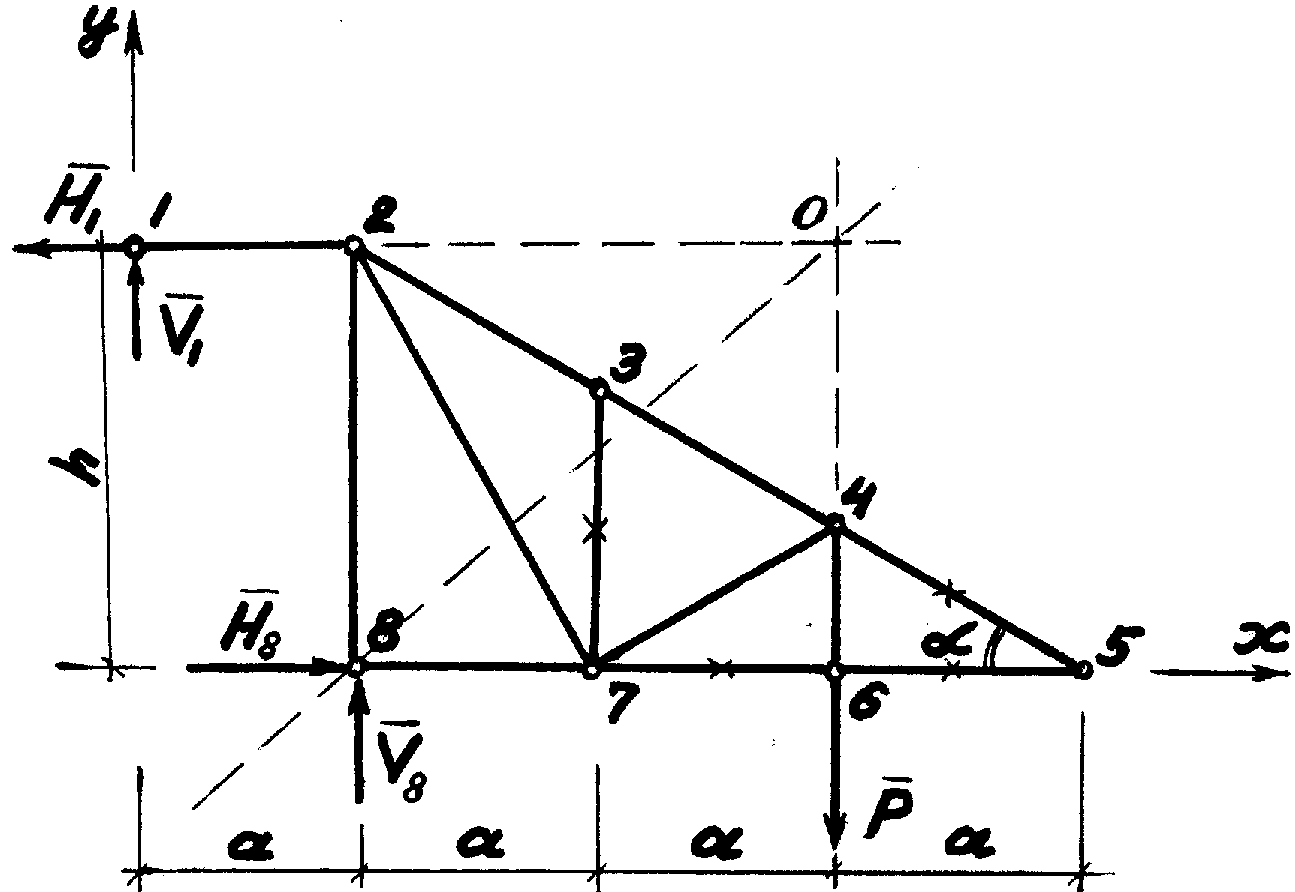
Рис.5.2.
Выбираем
направление осей ![]() и у и реакции в узлах 1 и 8 находим в
проекциях на эти оси.
и у и реакции в узлах 1 и 8 находим в
проекциях на эти оси.
Начнем с расcмотрения равновесия узла 1 (рис. 5.3).
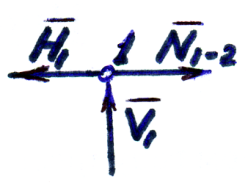
Рис.5.3.
Из
условия равновесия в проекции на ось
у: ![]() = 0.
= 0.
На
ось ![]() :
-
:
-![]() +
+ ![]() = 0;
= 0; ![]() =
= ![]() .
.
Знак
“+” говорит о том, что направление
действия реакции ![]() выбрано верно, а стержень 1-2 растянут.
выбрано верно, а стержень 1-2 растянут.
Составим моментное уравнение равновесия относительно узла 8:
![]() =
= ![]()
![]() =
= ![]()
![]()
![]() .
.
Уравнение равновесия фермы в проекции на ось у:
![]() - P
= 0 (
- P
= 0 (![]() = 0),
= 0), ![]() = P
= 4000кH.
= P
= 4000кH.
Уравнение
равновесия в проекции на ось ![]() :
:
-![]() +
+ ![]() = 0;
= 0; ![]() =
= ![]() = 4618,8кH.
= 4618,8кH.
Линия действия всех найденных опорных реакций и внешних сил пересекаются в т. О (рис. 5.2).
в) Нахождение усилий в стержнях.
В одном из стержней усилие уже фактически найдено:
![]() = 4618,8кH.
Стержень растянут.
= 4618,8кH.
Стержень растянут.
Порядок рассмотрения узлов определяет правило: в узле должны сходиться не более двух стержней с неизвестными усилиями.
Узел 8 (рис 5.4)
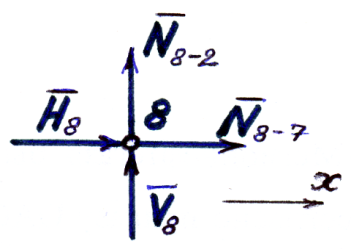
Рис. 5.4.
Уравнение равновесия в проекции на ось x:
![]() = 0:
= 0: ![]() +
+ ![]() = 0;
= 0; ![]() = -
= - ![]() =
= ![]()
Стержень 8-7 сжат.
Уравнение равновесия в проекции на ось y:
![]() = 0:
= 0: ![]() +
+ ![]() = 0;
= 0; ![]() = -
= - ![]() = - 4000кH.
= - 4000кH.
Стержень 8-2 сжат.
Узел 5(рис.5.5).
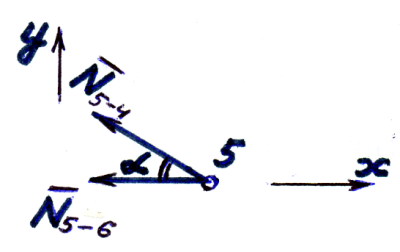
Рис 5.5.
![]()
![]()
![]()
На рис.5.2. Неработающие стержни отмечены крестиком.
Узел 6 (рис.5.6).
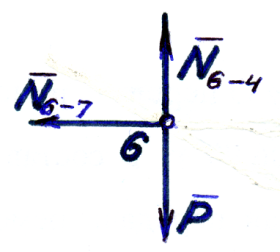
Рис.5.6.
![]()
![]()
Стержень 6-4 растянут.
Узел 4 (рис.5.7).
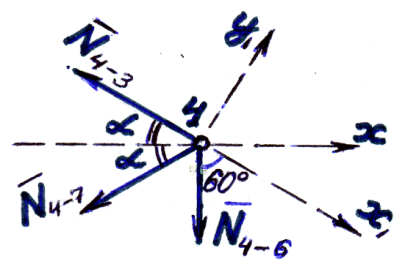
Рис.5.7.
![]()
![]()
Стержень 4-7 сжат.
![]()
![]()
Стержень 4-3 растянут.
Узел 3 (рис.5.8).
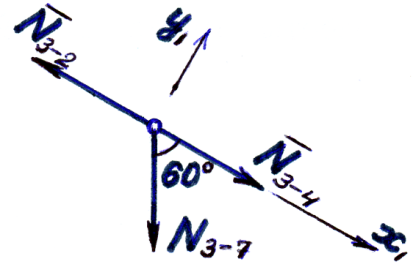
Рис.5.8.
![]()
![]()
Стержень 3-2 растянут.
Узел 2 (рис. 5.9)

Рис.5.9.
![]() =
= ![]() =
= ![]() =
= ![]() = 0,577,
= 0,577, ![]() =
= ![]() = α.
= α.
![]()

Стержень 2-7 растянут.
Результаты вычислений сведены в табл. 5.1.
Таблица 5.1
|
Стержень |
1-2 |
2-3 |
3-4 |
4-5 |
5-6 |
6-7 |
7-8 |
2-8 |
2-7 |
|
Усилие,кН |
4618,8 |
4000 |
4000 |
0 |
0 |
0 |
4618,8 |
-4000 |
6928,2 |
|
Cтержень |
3-7 |
4-7 |
4-6 |
|
Усилие,кН |
0 |
-4000 |
4000 |
Обратите ещё раз внимание на узлы 3, 5, 6, 8: на взаимное расположение стержней, направление внешних сил, величины усилий в сходящихся в них стержней. Выявленные закономерности позволят в дальнейшем быстрее определять усилия.